双机协作的频谱感知算法
2012-07-02郝博雅
郝博雅,周 辉,孙 斌
(1.装备学院,北京 101416;2.中国人民解放军63961 部队,北京 100012)
在近年的战争中,无人机发挥了越来越重要的作用,主要承担了攻击、侦查、搜救、预警和后勤保障等任务。尤其在障碍物众多、地形复杂以及恶劣环境中执行任务时,更迫切需要高性能的无人机,因此提高无人机作战能力成为现代战争的迫切需要[6]。但是在信息化战场上,也面临很多新的问题,一是由于类似无人机的飞行器数量不断增加;二是战场电磁干扰的不断增大[1];三是频谱资源日益匮乏,所以频谱空穴的发现和利用显得尤其重要。
目前,认知无线电中的频谱感知技术是发现频谱空穴的最佳方法,也是提高频谱资源利用率的关键技术。文献[8]提出目前所研究的合作频谱检测都是在假设认知用户的平均信噪比相同,判决门限初始值相同的情况下进行的,文献[8]认为这是基本合理的。而文献[7]提出,在实际环境中,由于衰落、阴影等因素的影响,会造成认知用户的信噪比不相等,在这种情况下如果仍然假设各认知用户的门限取值相同,必然会导致合作频谱检测性能的下降。所以本文提出的双机协作的频谱感知算法结合实际应用,主要针对信噪比不同的情况下,选取不同的门限,并进行适当调整,达到增强合作频谱检测性能的目的。
1 基于双机协作的频谱感知算法原理与分析
1.1 频谱感知系统模型
假设一个二元检验:

其中:x(t)是接收信号;s(t)是授权用户发送信号;h(t)是信道响应;n(t)表示均值为0,方差为的加性白噪声;H1表示频段占用,认知用户不可以接入;H0表示频段空闲,可以被认知用户使用。
1.2 单用户检测原理
采用能量检测算法,这种算法最大的优势是不需要知道信号的具体形式,在特定的时间间隔内测量输入信号的能量,具体原理是将输入信号首先通过一个带宽为W 的带通滤波器,获取感兴趣的频段,然后进行平方运算,通过积分器在一段时间T 内进行积累,如图1 所示[2]。
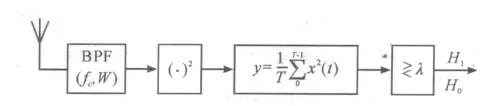
图1 能量检测方框图
如果积累的能量高于一定门限,则说明有信号存在,如果低于一定的门限,则说明仅有噪声。根据H.Urkowitz[4]的研究,当仅有噪声存在时,检验统计量y 服从自由度为2TW 的中心χ2分布;当授权用户信号存在时,检验统计量y 服从自由度为2TW 的非中心χ2分布。其中,非中心参数为γ=Es/N02,Es为授权用户信号能量,N02为双边噪声功率谱密度,W 为信号带宽,即[4]

这里假设门限值为ζ,2TW≥250,根据中心极限定理,可以用高斯分布对2 种假设量进行近似,并能够得到较好的效果,此时式(3)和(4)可分别近似为[4-5]:

1.3 双机协作的频谱感知算法
在2 架无人机协同作战的情况下,每架无人机采用能量检测法作为单用户检测,在保证联合虚警概率一定的情况下,对每架无人机的判决门限进行调整,从而达到提高频谱检测性能的目的,更准确地发现频谱空穴,提高频谱利用率。
1.3.1 基本原理
协作频谱感知的联合检测概率为PD_OR,联合虚警概率为PF_OR,分别由式(5)和(6)表示。

在实际应用中,Pdi和Pfi分别代表每架无人机的检测概率。根据文献[7]指出的若每个用户的虚警概率是一个确定的参数,就会产生最优解。

这时假设:在多用户的情况下,如果每个用户的Pdi越大时,也随着增大,所以每个用户的检测性能与联合检测性能有直接的关系,最优解理想数值趋近于1。因此,本文提出了一种基于双机协作的频谱感知算法,通过分别调整2 架无人机的检测性能,提高联合检测性能。基本思想是增大高信噪比认知用户对合作频谱检测的影响,同时降低低信噪比认知用户对合作频谱检测的影响,达到频谱检测性能提高的目的。
1.3.2 算法应用分析
2 架无人机合作检测的原理如图2 所示。

图2 双机合作检测原理
采用OR 的合作准则:

假设无人机1 的信噪比高于无人机2,这时需要增加无人机1 的虚警概率,达到无人机1 和无人机2 的信噪比的相对平衡,可得

对于信噪比略低的无人机2,需要降低无人机2 的虚警概率,达到无人机1 和无人机2 的信噪比的相对平衡,可得

其中:ζ 为判决门限的调整因子,是关于2 架无人机信噪比1 和信噪比2 的函数保证调整因子的衰减幅度不是特别大,同时满足0≤ζ≤1。可近似为

调整后的检测概率可由式(4)推算出,过程:


无人机1 调整后的门限值为

所以

类似地,可以得出λ2,Pd2。
由式(8)可以计算出联合检测概率PD_OR。
2 实验仿真
将2 架无人机分别视为单个用户。通过Matlab 仿真:假设信噪比不同的2 个用户,SNR1 = -5 db,SNR2 = -15 db,在门限取值相同的情况下,采用“或”准则进行协作检测。同时,假设信噪比不同的2 个用户,SNR1 = -5 db,SNR2 = -15 db,在门限取值不同的情况下,也采用“或”准则进行协作检测。仿真结果如图3 所示。所以可以得出结论,信噪比不同的情况下,采用“或”准则,门限取值不同的频谱感知算法的检测性能是优于目前研究的协作频谱感知算法中假设门限取值相同的检测性能。

图3 协作频谱感知算法中门限取值相同和门限取值不同的比较框图
本文提出的算法主要针对信噪比不同的2 个用户,门限取值不同,并且相应地对门限进行了适当调整。通过Matlab 仿真:假设信噪比不同的2 个用户,一个信噪比好,一个信噪比相对比较差,SNR1 = -5 db,SNR2 = -15 db,(与图3 的仿真中取值相同),在门限取值不同的情况下,门限不进行调整,采用“或”准则进行协作检测。同时,假设信噪比不相同的2 个用户,SNR1 =-5 db,SNR2 = -15 db,按照本文提出的方法对门限进行调整,采用“或”准则进行协作检测。仿真结果如图4 所示,所以可以得出结论,采用“或”准则,通过对信噪比不同的认知用户的判决门限进行调整可以增强检测性能。

图4 两种算法检测性能比较框图
3 结束语
提出了双机协作频谱感知算法,从理论上进行了分析,通过Matlab 验证了该算法的性能优于目前研究的协作频谱感知算法。通过将该算法与无人机作战应用的紧密结合,目的是保证复杂电磁环境下,无人机作战过程中及时发现频谱空穴,最大程度地发挥效能。
[1]王汝群.战场电磁环境[M].北京.解放军出版社,2006:56-58.
[2]Barkat M. Signal detection and estimation[M].2nd edition.[S.l.]:Artech House,Inc.,2005:70-82.
[3]Ang li.Opporunistic Cooperation for Distributed Spectrum Sensing in Cognitive Radio[J].IEEE Communicaion Society subject matter for publication in the IEEE ICC,2011(3):51-55.
[4]Urkowitz H.Energy detection of unknown Deterministic signals[J].proc.IEEE,1967,55(4):523-531.
[5]Gardner W A.Signal interception:A unifying theoretical framework for feature detection[J]. IEEE. Trans. Commun.,1998,36:897-906.
[6]金国增.基于升空平台的战场频谱感知[C]//中国通信协会国防通信技术委员会学术研讨会.[出版地不详]:[出版者不详],2002.
[7]叶中付,贾红江.一种认知无线电的联合频谱检测算法[J].通信与网络,2009,35(4):126-129.
[8]Chen L. An Adaptive Cooperative spectrum sensing scheme based on the Optimal Date fusion Rule[J].IEEE ISWCS,2007,52:582-586.
[9]何世彪,张新春,孙江.一种基于信道节点的动态频谱分配算法[J]. 重庆理工大学学报:自然科学版,2011(1):49-53.
