现代飞行器的自修复飞行控制技术
2012-07-02曲东才于进勇卢斌文刘爱元
曲东才,于进勇,卢斌文,刘爱元
(海军航空工程学院 控制工程系,山东 烟台 264001)
随着现代航空技术的快速发展,现代飞行器设计越来越复杂精密,其性能也得到大幅改进和提高。作为飞行器核心技术之一的飞行控制技术,其自动化和复杂度也得以空前提高,对其操纵可靠性、安全性要求也进一步提高。可以说,现代飞行器的软、硬故障是影响其安全性的重要因素,尤其是操纵面损伤、卡死或浮松等硬故障可能成为现代飞行器飞行控制系统的致命问题。
为使现代飞行器及其飞行控制系统具有一定故障工作和故障安全能力,发展智能飞行控制系统将是大势所趋。自修复飞行控制技术是在电传飞行控制系统基础上发展起来的一种主、被动容错技术相结合的,具有一定智能化的先进飞行控制技术,在飞行器发生故障时可重新配置或重新构造飞行器控制律,可解决现代飞行器电传操纵系统余度管理技术无法处理的飞行器损伤、卡死或浮松等硬故障发生后的控制性能保持问题。
1 自修复飞行控制技术及其发展
1.1 自修复飞行控制技术内涵
自修复飞行控制技术具有一定模式识别和智能化信息处理功能,是“主动飞行控制技术”的进一步发展。智能控制技术与传统控制技术区别主要表现在[1]:①智能控制技术无需确知受控对象的精确数学模型,采用知识表达、模糊逻辑、自动推理决策等相关信息处理技术;传统控制技术则必须已知受控对象的精确数学模型,并根据其数学模型及性能指标设计相应的解析控制律;②智能控制方法是人工智能技术、传统控制理论、运筹学和信息论相结合的控制方法,是这些学科的交叉,并利用计算机向工程实用全面深入发展;传统控制方法则是基于线性/非线性古典/现代控制理论,在工程实践运用上,线性系统控制方法已得到广泛深入的工程运用,但对非线性系统尤其是高阶非线性系统的控制还缺乏系统深入的工程应用研究。
具有智能控制技术特点的自修复飞行控制技术对现代飞行器及飞行控制系统的高可靠性和高生存性具有重要作用。自修复飞行控制技术主要内涵是[2-3]:在对飞行控制系统进行设计时,可基于系统控制机构本身的功能硬件冗余,重新构造飞行器控制律,以便重新分布操纵面上的力和力矩,提高飞行控制系统对其机构硬件故障或战损的适应性,使故障或战损后的飞机仍可安全飞行甚至继续执行作战任务。显然,自修复飞行控制技术将使现代飞行控制系统的可靠性、可维护性和安全性等性能得以极大改善,降低现代飞行器的寿命周期费用,并大大提高飞机的生存能力。
1.2 自修复飞行控制技术简要发展
1977年4月12月,美国三角(Delta)航空公司1080 航班的一架DC-10 飞机在芝加哥发生坠毁事故,其原因认定为该机在起飞时其左升降舵发生卡死故障(舵面上偏19°);同样美国空军对在越战中参战战斗机进行了统计分析后得出:如果具有自修复能力,其70%的战斗机可避免损失。由此可见飞机具有自修复系统对提高其安全性、可靠性和生存能力的重要意义,飞行器的自修复控制技术也顺理成章地引起了人们的重视并得到发展。
在20 世纪80年代,美空军将“自修复飞行控制系统设计”作为“2010年下一代技术”研究重点之一,1982年NASA 首次提出自修复控制概念,2年后美空军飞行动力学试验室开始实施自修复飞行控制系统计划,洛克希德·马丁公司将“自设计飞行控制器(SDFC)”用于RESTORE 计划,已在F -16 飞机上试飞成功。目前,以美国为代表的航空技术先进国家已经对自修复飞行控制系统关键技术、系统设计开展了大量研究和试飞验证。近年来,基于在线神经网络和动态逆的自修复控制系统也由波音公司在RESTORE 项目进行开发研制,并以X-36 飞机为载机成功试飞。2002年,美军又明确提出研制具有故障自愈调控功能的无故障、少故障或免维修、少维修的新一代军用飞行器自修复飞行控制系统,标志着自修复飞行控制技术已发展到一个新的水平。
我国从20 世纪90年代初期开始自修复控制的研究,在1993年航空科学基金首次资助飞机自修复控制系统的研究,在“九五”期间对自修复飞行控制技术展开了深入研究,研究内容主要集中在自修复控制方案、故障检测、控制律重构、自修复控制鲁棒性以及开展数字仿真、地面半物理仿真试验等,并取得了一批阶段性研究成果。
2 自修复飞行控制结构方案
自修复飞行控制已有多种形式的控制方案[3-5],主要包括:基于飞行器数学模型线性化/非线性化自修复控制方案、基于自修复时序的间接/直接自修复控制方案等。
基于飞行器小扰动线性化模型的自修复控制方案是早期方案,如在1986年美国兰利研究中心提出的自修复控制方案即是基于线性定常的飞行器数学模型,要求飞行器故障可准确诊断、检测和辨识[4-5]。飞行器自动配平系统可对发生的小故障进行处理,如发生大故障则可通过重组飞行器控制律来保持飞行器正常飞行。由于现代飞行器数学模型是强耦合、变参数、非线性的,当飞行器出现突发性结构故障时将会失稳并产生较大幅度的偏离平衡点的运动,用小扰动法得到的线性模型显然不能表征受损飞行器的运动特性,故该自修复控制方法有较大局限性。于是基于非线性模型的自修复控制方案得到快速发展,目前广泛应用的基于非线性模型的自修复控制方案主要包括如下几种:反馈线性化方案(包括微分几何法、非线性动态逆方法)、Back-stepping 方案、增益预置方案等。由于非线性系统本身的复杂性,基于非线性模型的自修复控制方案还存在许多问题,远没有达到实用要求。
基于修复时序的间接/直接自修复控制方案主要是在对故障检测隔离和重构控制律的次序和时间上不同[5]。间接自修复控制方案是在飞行控制律重构前,首先对飞行器故障部位实施检测和隔离,获得故障类型和大小,然后在线切换至自修复控制律,对飞行器故障进行自修复。直接自修复控制方案是在非线性系统控制和自适应控制基础上发展起来的。该控制方案不依赖于飞行器故障模式及损伤的准确信息,不首先对故障进行辨识和隔离,而是基于控制系统的性能指标对未知故障进行控制律重构,显然该方案快捷,但困难极大。
图1 为飞行器间接自修复飞行控制系统典型结构方块图[1,3-5]。
由图1 可见,飞行器间接自修复飞行控制系统主要由两大模块组成:飞行器故障检测/辨识模块和飞行器可重构控制系统模块。其中飞行器可重构控制系统模块由自修复机构和操纵杆/脚蹬等操纵机构部件构成的基本控制器组成。对图1 简化后,可形成图2 的简单形式。
其简要工作原理如下[6]:飞行器输出信号送入故障检测/辨识模块,当飞行器某控制面受损或卡死后,首先由此模块实施控制面故障的检测和辨识;然后将检测辨识信号送入自修复机构,并自动切换至鲁棒性极强的应急控制律,以便保证飞行器在短时间内不失控;此后对故障实施精确检测,确定故障部位、故障性质、受损程度,即常规故障检测与识别(FDI);最后根据精确检测结果,对飞行器控制律实施重构。保持飞行器的稳定性是其基本要求,并在此基础上尽可能恢复飞行器原操纵品质。
飞行器间接自修复飞行控制方案是先检测/辨识故障,后基于故障信息重构控制律进行自修复。显然,该方案只要在原正常飞行控制律基础上增加控制混合器即可,其物理概念清晰。但缺点也是显然的:①自修复控制律的重构需要首先判读故障部位、类型、大小,而故障本身是很复杂的,在实际应用中容易出现故障误判,影响控制律重构;②故障检测算法的速度和精度难以权衡,存在实时性问题和误报警问题;③自修复控制律只针对有限故障模式;④由于在飞行器故障检测/辨识过程中,原控制律在起作用,其飞行品质还在持续恶化,只有在故障辨识完成,控制律得到重构,其飞行品质才有可能得到逐渐修复,因此将导致飞行器自修复的过渡品质可能较差,甚至会使飞行器失控。
针对上述问题,发展了直接自修复飞行控制系统。图3 为飞行器直接自修复飞行控制系统典型结构方块图[3-5]。
该控制方案抛弃了飞行器间接式自修复结构方案的先辨识故障,后重构控制律的时序结构,而是基于控制系统性能指标直接对飞行器控制律进行重构。由于该控制方案不首先对故障进行检测、辨识和隔离,因此并不依赖于飞行器故障模式及受损的准确信息。但在未知飞行器故障部位、故障模式、故障大小时,欲快速重构对各类故障模式都有较好适应性的控制律,将面临重重困难。该类自修复飞行控制系统还在进一步探索研究中,距离实际使用还有较大距离。
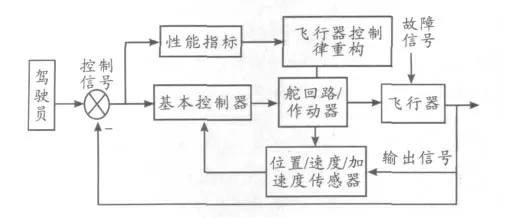
图3 直接自修复飞控系统典型结构
3 自修复飞行控制系统关键技术
基于容错控制基础上发展起来的飞行器飞行控制系统自修复关键技术,主要包括如下内容:①飞行控制系统故障的自动检测诊断、故障特征提取、故障模式识别与辨识、故障自动隔离技术;②自修复控制律的重构技术,主要包括重新配置飞行控制系统(reconfigurable fligh control system)自修复控制律的重构技术和重新构造自修复飞控系统(reconstructible flight control system)自修复控制律的重构技术,以及相关的时序匹配及无痕迹切换等关键技术;③自修复飞行控制系统的仿真验证及试验评估技术。
3.1 故障自动检测与诊断技术
飞行控制系统故障的全局自动检测诊断、故障模式识别与辨识、故障自动隔离技术是自修复飞行控制技术的重要一环,对提高或改善自修复飞行控制系统品质起着关键作用。为此,对故障的自动检测诊断和隔离必须具有实时性,虚警率、漏警率要小。但现代飞行器及飞行控制系统是一种高度复杂的大系统,其故障模式复杂多样,导致对其各种未知故障的全面自动检测诊断和隔离困难较大。目前飞行控制系统故障检测诊断技术主要包括基于系统动态模型和不依赖于系统动态模型的故障检测诊断技术。
基于系统动态模型的故障检测诊断技术[7-8]包括检测滤波器技术(F -16 仿真和试飞验证采用)、等价空间技术(F -8、F-15、C-131H 仿真和试飞验证采用)、广义似然比技术、参数估计技术、马氏链技术、鲁棒观测器技术等。基于系统动态模型检测诊断技术的主要步骤如下:首先,基于控制系统观测器或滤波器对系统状态参数实施重构,形成状态参数残差序列;然后,对残差序列中的故障信息进行增强和放大,以便抑制模型误差等非故障信息;最后,对残差序列进行统计分析,实施故障信息的检测定位和隔离。
不依赖于系统动态模型的故障检测诊断技术[9]主要包括基于专家系统、模式识别、神经网络理论的故障检测诊断技术等。如F-16、F-18 战斗机的故障检测诊断就辅助模糊逻辑和神经网络技术。该技术具有一定智能性,其适应性好、应用灵活,但故障诊断较困难,不便于故障的在线辨识估计。
3.2 自修复控制律的重构技术
目前,飞行器飞行控制系统自修复控制律的重构技术主要包括飞行控制系统控制律的重新配置技术和飞行控制系统控制律的重新构造技术。
3.2.1 自修复控制律的重新配置技术
飞行控制系统自修复控制律的重新配置技术是预先考虑飞行器全包线不同状态下飞行控制系统的所有故障模式,对飞行器可能故障模式进行分类,预先设计每种故障模式的自修复控制律并存储于机载飞控计算机上,基于故障检测/辨识模块,当发生某一类故障时,给出故障信息,及时调用已存储的相关自修复控制律对该类故障进行自修复。
显然重新配置自修复控制律必须事先预测飞行器全包线下的所有故障模式,并针对每种故障模式进行自修复控制律的配置,因此该类自修复控制系统需要进行大量设计,并需考虑到实际飞行控制系统各种情况下可能发生的所有故障模式,显然这是非常困难的甚至是基本做不到的。
重新配置飞行控制系统控制律方法[10~14]主要包括伪逆法、多模型法、定量反馈法(quantitative feedback theory,QFT)、特征结构配置法等。
伪逆法:当飞行器操纵面发生受损、卡死等故障时,自修复控制系统基于剩余的无故障操纵面进行适当线性组合,重新配置故障操纵面信号。这通常表现为在原输入阵前乘一个伪逆阵,这也是伪逆法的由来。伪逆法特点是可直接快速重构飞行器控制律,这对飞行器突发故障时的控制恢复非常重要。伪逆法已在F-15 验证机上进行了飞行验证,证明该方法是一种有效自修复方法。目前为进一步保证伪逆法对未知故障在线计算和调整时的稳定性,已提出多种改进的伪逆法,保证了单输入多输出系统以及在实时参数描述下的非线性飞控系统在重构时控制系统的稳定性。
多模型法:基于多模态控制方法,设计多个不同飞行状态下的固定理想模型或自适应模型(基于飞行品质要求)及按模型匹配方法设计相应的控制器,根据模型转换准则,判断当前飞机状态与哪一个模型最接近并转换到相应控制器上。该方法基于离线训练、在线辨识和决策策略,通过将有限个简单控制器的控制规则有机结合,形成一种能在大范围内具有较高鲁棒性的控制系统。实际应用时对设计模型和控制器的选择、切换时机还需要进一步研究。
定量反馈重构法:该方法是一种离线设计、在线选择的控制律重构方法。在综合考虑现代飞行器控制对象的不确定性范围和对系统性能指标要求基础上,以定量方式在Nichols 图上展开分析与设计,保证设计结果具有稳定鲁棒性和性能鲁棒性。当飞行器控制舵面局部受损或失效时,其飞行器动态模型气动导数所受的影响可看作是不确定对象鲁棒性问题的扩展,因此可基于定量反馈理论来设计一套固定的控制器,重构控制律,容许飞行器对象参数具有不确定性,保证设计结果具有较强鲁棒性。
特征结构配置法:由极点配置法发展而来,其特征值决定系统响应快速性,特征向量反映运动模态间的耦合指标(如荷兰滚运动幅度、滚转角和侧滑角间的相对相位等)。该方法在考虑系统零、极点要求的同时,也满足多变量解耦、系统鲁棒性等方面的要求。该方法对低阶模型尤为有效,但对高阶系统的设计则较为困难,且控制效果不尽如人意。
3.2.2 自修复控制律的重新构造技术
飞行控制系统自修复控制律的重新构造技术是基于飞行器剩余的无故障元部件,针对当前系统模型,进行在线实时参数辨识、在线重新构造飞行器控制律,以使控制系统达到某种要求。显然该控制律重构是在线进行的,这对机载飞控计算机提出了较高要求,必须有足够大的内存容量和足够快的运算能力。
重新构造飞行控制系统自修复控制律方法[15-18]主要有反馈线性化方法、模型跟随控制方法、模型参考自适应控制方法等。
反馈线性化方法也是非线性控制系统设计常用方法。该方法基于反馈线性化理论(微分几何和动态逆)对飞行器非线性动力学模型进行线性化处理,并以此来设计重构飞行器自修复控制律。该方法可避免大量增益调度表的设计和试验,降低对机载飞控计算机的存储容量要求,且能适应更为复杂的飞行状况。基于动态逆的飞行控制系统已在大迎角超机动飞机、先进短距起飞/垂直着陆飞机、直升机以及无人机中得到成功应用。
模型跟随控制方法包括隐模型跟随控制和显模型跟随控制两大类。顾名思义,该控制方法是使实际系统输出能够精确跟踪参考模型输出,显然需要进行实时参数辨识,属于自适应控制范畴。其中隐模型跟随控制是没有明确的显式参考模型,只是在重构控制律时才能体现出来。
模型参考自适应控制基于机载计算机软件实现的参考模型与被控飞行器模型状态变量之间的运动偏差来重构控制律,通过实时辨识、实时调整来达到消除偏差的目的。
3.3 自修复飞行控制系统仿真验证及试验评估技术
为验证所设计的飞行器自修复飞行控制系统的有效性,在系统投入使用前,必须对其进行仿真验证及系统性能评估,如采用全数字仿真、半实物仿真直至全实物物理仿真验证。目前已对这些工作展开研究,但还很不完善。近年来自修复飞行控制系统实物试验备受美国等航空发达国家重视,在各种新型试验飞行器上对其自修复飞行控制系统进行实物验证,如美国NASA的X-33 计划、空军X -36 先进无尾战斗验证机RESTORE 计划、F-18 自修复飞行控制系统(SRFCS)计划、F -15 高集成数字电子设备(HIDEC)的SRFCS 计划和MD-11 的推力控制飞机(PCA)项目等。但总体而言,对自修复飞控系统的仿真试验尤其是半实物仿真试验和全实物物理试验还存在诸多难题有待研究解决。
4 结束语
虽然现代飞行器的自修复飞行控制技术已在理论和应用等方面取得一定研究成果,但大多是基于线性被控对象,而高速运动的飞行器,通常具有高阶非线性,存在参数时变性、强耦合性、结构故障也是千变万化,其自修复控制技术、理论及其相应的自修复飞行控制系统在其实时性、实用性、鲁棒性及可推广性等问题上仍有大量理论、技术应用有待进一步研究和验证。
勿容置疑,飞行器自修复飞行控制技术及其飞行控制系统必将是未来先进战斗机、无人机等飞行控制系统的发展方向,随着智能控制理论研究的不断深入,基于智能控制理论的智能故障诊断技术、飞行器控制律智能重构的自修复技术,可为解决具有高阶非线性的现代飞行器控制提供强有力的技术支持。
[1]昂海松,余雄庆.智能飞行控制技术,飞行器先进设计技术[M],北京:北京国防工业出版社,2008.
[2]Kuberbus D.Self-repairing flight control systems overview[M].USA:NAECON,1983.
[3]齐晓慧,杨志军,吴晓蓓.无人机自修复飞行控制系统研究综述[J].控制工程,2006,13(6):513-516 .
[4]黄卫.非线性自修复控制方法及仿真研究[J].合肥工业大学学报,2001,24(1):17-22.
[5]徐德文.粗集信息分析在故障诊断中的应用及自修复飞行控制系统效能评估[D].南京:南京航空航天大学,2002.
[6]邵华章,陈宗基.自修复飞控系统设计研究[J].航空航天大学学报,1999,25(1):30-33.
[7]Gerard S,Gopisetty S M,Stengel R F.A fuzzy logic-parity space approach to actuator failure detection and identification//[C].36th Aerospace Sciences Meeting & Exhibit,Reno,1998.
[8]Xiong Y,Saif M.A novel design for robust fault diagnostic observer[C]//The 37th IEEE Conference on Decision & Control,Florida,1998.
[9]Gaither S A,Agarwal AK.A real-time expert system for self-repairing flight control[R].USA:AIAA-89-3427-CP,1989.
[10]Pei Y,Li P Q,Yao Y P.The application of function reconfiguration for digital fly-by-wire flight control system[J]. IEEE,Trans.On Automatic Control,1998(3):76-81.
[11]Gopinathan M,Boskovic J D,Mehra R K,et al.A multiple model predictive scheme for fault - tolerant flight control design[J].IEEE,Trans.On Automatic Control,1998(5):153-158.
[12]Robert C,Eslinger A,Chandler P R.Self-repairing fligh control system overview[J]. IEEE,Trans. On Automati Control,1993(4):143-151.
[13]王美仙,李明,张子军. 飞行器控制律设计方法发展综述[J],飞行力学,2007,25(2):1-4.
[14]Narendra K S,Balakrishnan J.Adaptive Control Using Multiple Models[J]. IEEE Transactions on Automatic Control,1997,42(2):171-187.
[15]胡寿松,周川,胡维礼.基于径向基函数神经网络的模型跟随自修复控制[J].南京航空航天大学学报,1998,30(5):486-489.
[16]Jovan D B,Raman KM. Stable multiple model adaptive flight control for accommodation of a large class of control effector failures [C]//The American Control Conference. San Diego,1999.
[17]Kim KS,Lee K J,KimY D.Model following reconfigurable flight control system design using direct adaptive scheme[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit,Monterey,2002.
[18]朱家强,郭锁凤.基于神经网络的超机动飞机自适应重构控制[J].航空学报,2003,24(3):246-250.
