基于卡尔曼滤波的航空发动机单神经元自适应控制
2012-07-01王稳战陈长发胡金海
王稳战,陈长发,胡金海
基于卡尔曼滤波的航空发动机单神经元自适应控制
王稳战1,陈长发2,胡金海2
(1.94106部队,陕西西安710614;2.空军工程大学工程学院,陕西西安710038)
针对航空发动机多任务、多变量、高精度和一体化控制的需求,提出了一种基于卡尔曼滤波的单神经元自适应控制方法。该方法在单神经元自适应控制算法的基础上,增加了对控制量和发动机反馈量的滤波,提高了响应速度,精度较高。仿真结果证明,该方法对过程噪声和测量噪声具有很强的克服能力,所需计算量较小,能满足发动机控制对实时性的要求。
航空发动机;卡尔曼滤波;单神经元;自适应控制;滤波;噪声
1 引言
随着航空发动机飞行条件和工作状态变化范围的增大,被控参数及执行机构数目增多,需采用更多的控制变量和控制回路对发动机参数进行调节,传统的液压机械式调节器已不能满足航空发动机多任务、多变量、高精度和一体化控制的需要。数字电子控制是随着航空发动机技术、控制理论、数字电子技术的不断发展,以及大规模、超大规模集成电路和微处理器的不断涌现而发展起来的全新控制方式。它可以在航空发动机控制系统中实现现代控制理论、甚至智能控制理论中各种复杂的控制算法,有利于提高发动机性能、降低燃油消耗、提高可靠性和可维修性[1~5]。
航空发动机智能控制是数字电子控制的重要内容,其发展方向主要包括神经网络控制、模糊控制、遗传算法和专家控制等。其中,神经网络是一个具有高度非线性的超大规模连续时间自适应信息处理系统,具有很强的非线性映射能力。神经网络控制器具有非常强的自适应性和鲁棒性,而且比模糊算法机理清晰,便于编程实现,比遗传算法占用资源少、速度快,比专家算法要求的先知经验少,非常适合作为航空发动机的智能控制算法。为此,本文提出一种基于卡尔曼滤波的航空发动机单神经元自适应控制算法。
2 改进的单神经元自适应控制算法
在控制工程领域,组成神经网络的每个神经元网络都可表示为图1所示形式。该神经元单元由多个输入xi(i=1,2,…,n)和一个输出y组成,u为神经元内部状态,θ为阀值,wi为单元xi到中间状态u的连接权值,s为外部输入信号,其数学描述为:
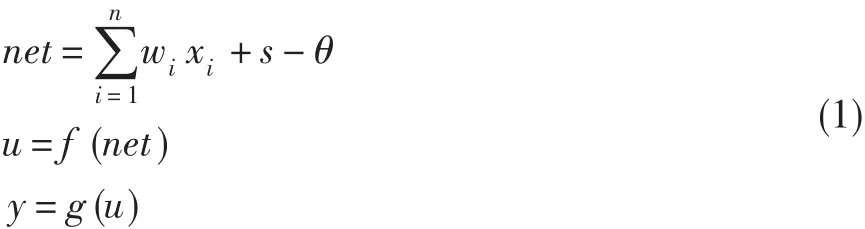
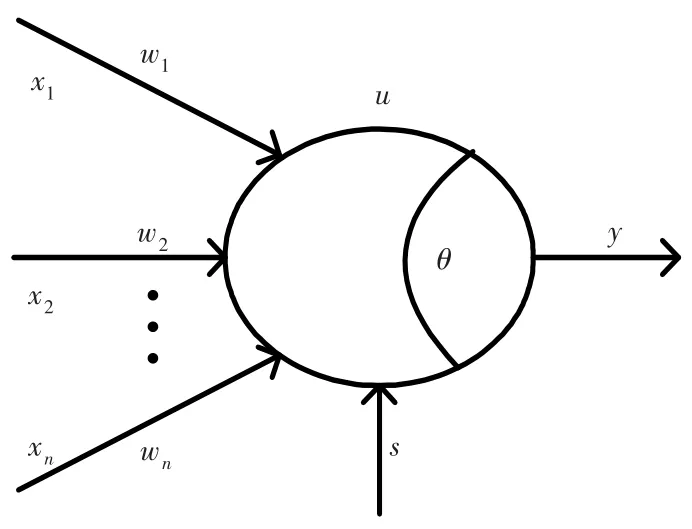
图1 单神经元模型Fig.1 Single neuron model
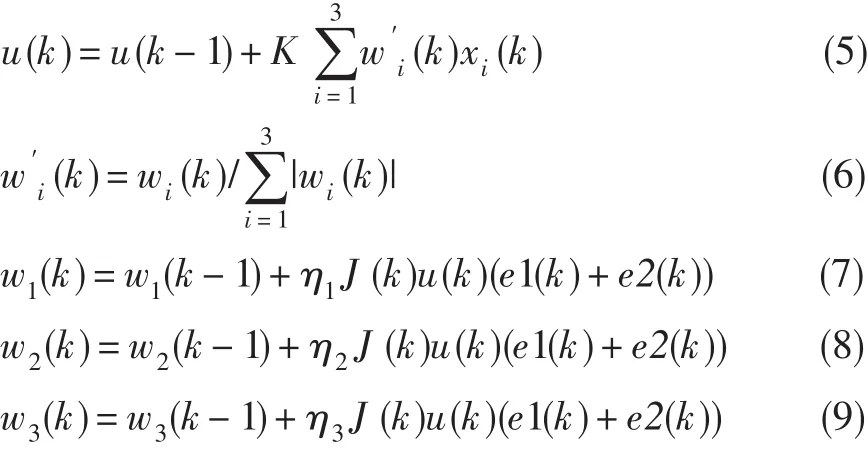
根据单神经元工作原理,为某型航空发动机设计的单神经元自适应控制系统如图2所示。其中,为了使神经元不依赖被控对象的模型,单神经元的输入变量一般可取为控制系统输入与输出的误差e1(k)、两次误差间的变化量e2(k),以及两次误差间变化量的平方e3(k),即
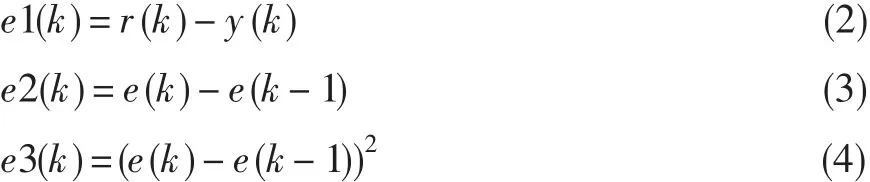
采用J(k)=e(k)作为神经网络的监督项,权值调整按有监督的Hebb学习规则进行。在大量实际应用中发现:e3(k)对于控制系统性能的改善几乎不起作用。基于此,可对单神经元自适应控制算法中加权系数学习修正部分进行修改,即将其中的ei(k)改为e1(k)+e2(k),改进后的算法如下[6]:
式中:K为神经网络比例因子,其大小选择非常重要。K值越大,控制系统的快速性越好,但超调量会变大;K值越小,控制系统的快速性会变差,超调量相应减小。由于控制系统没有考虑执行机构和燃烧室点火的延迟,因此K值宜小不宜大,以防止控制系统超调量过大造成发动机工作不稳定。
3 基于卡尔曼滤波的单神经元自适应控制方法
航空发动机工况非常恶劣,过程噪声和测量噪声在所难免,而且这些噪声是多维非平稳随机过程,时变性强,功率谱不稳定[7]。因此,为了提高数字控制系统的控制品质,可使用卡尔曼滤波器对控制器输出及发动机反馈信号进行滤波。基于卡尔曼滤波的单神经元自适应控制系统如图3所示。
卡尔曼滤波方法可简述如下:假设含有噪声干扰的被控对象在离散域内的状态空间模型为

式中:w(k)为过程噪声,v(k)为测量噪声。
离散卡尔曼滤波器的滤波算法为:

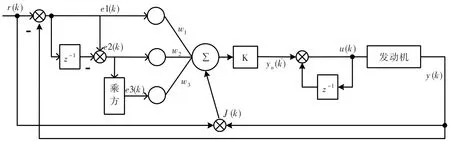
图2 航空发动机单神经元自适应控制系统Fig.2 Single neuron adaptive control system of aero-engine
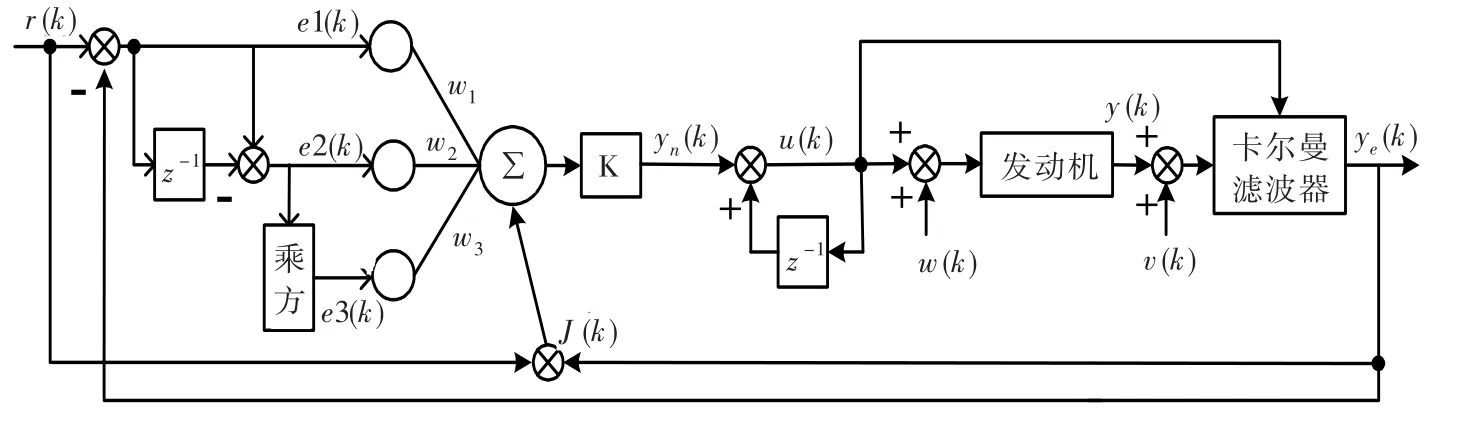
图3 基于卡尔曼滤波的航空发动机单神经元自适应控制系统Fig.3 Single neuron adaptive control system of aero-engine based on Kalman filter
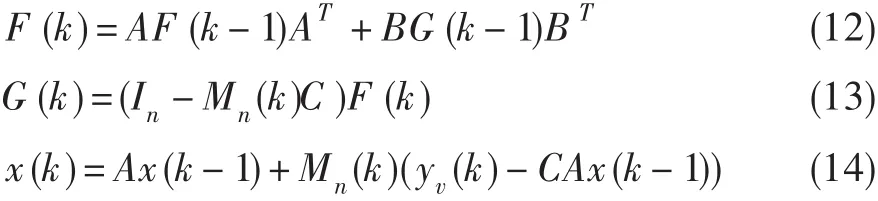
式中:F(k)为输出误差的协方差,G(k)为w(k)的协方差,R(k)为v(k)的协方差。卡尔曼滤波器的输出为:

估计误差的协方差为:

输入与输出的误差为:

4 计算机仿真
研究对象为某型涡扇发动机低压转子转速(n1)通道[8,9],该通道数学模型为:

式中:S1表示电磁阀的占空比信号,间接控制供油量。
其离散形式为:

模拟n1=85%~95%的加减速过程,则发动机模型为:

单神经元控制器中,取学习速率为η1=0.8、η2=0.5、η3=0.6,监督项取误差e(k),初始权值选为w1=0.40、w2=0.36、w3=0.35,n1参考输入为方波信号,过程噪声和测量噪声为±0.5%的随机信号,加滤波器前后控制系统的仿真结果如图4所示。
仿真结果表明,基于卡尔曼滤波的单神经元自适应控制器不仅响应迅速,精度较高,而且对过程噪声和测量噪声具有很强的克服能力,这对于工况恶劣的航空发动机来说至关重要。
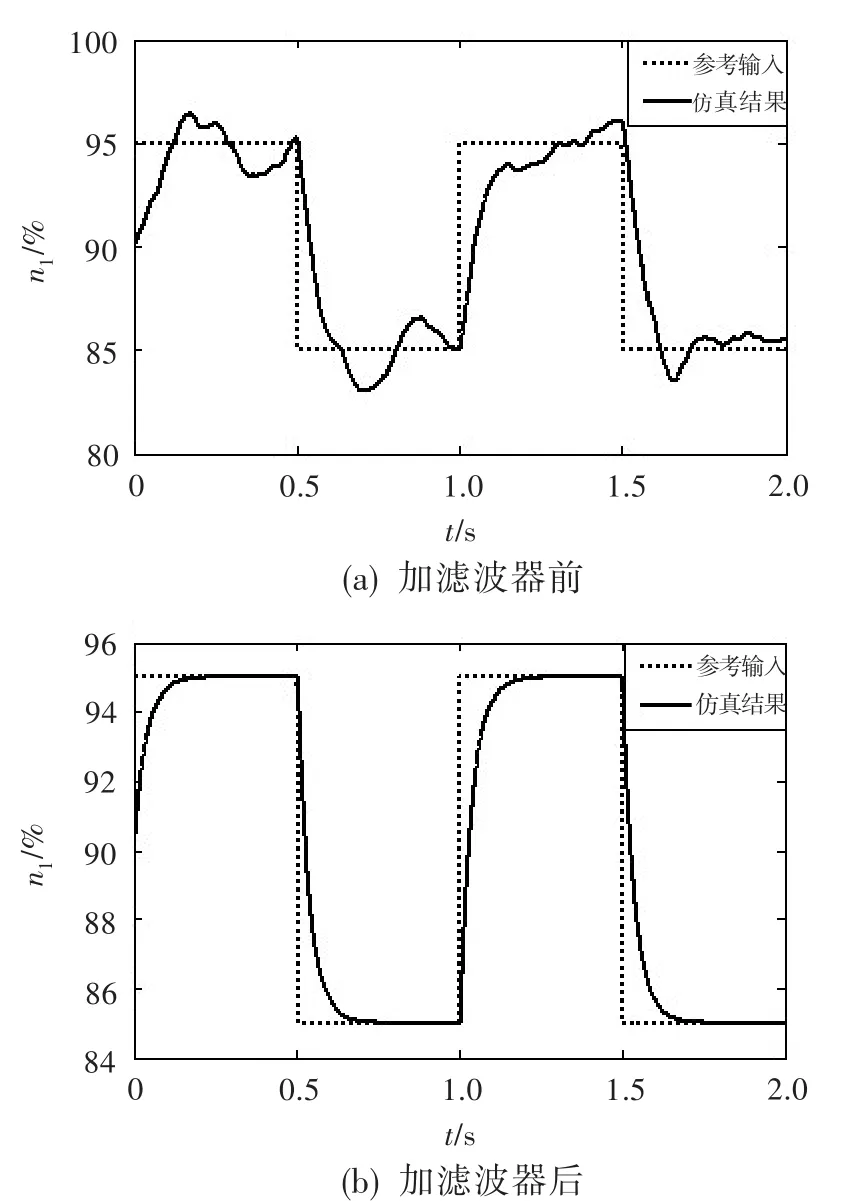
图4 单神经元自适应控制系统响应Fig.4 The response of single neuron adaptive control system
5 结论
本文针对航空发动机多任务、多变量、高精度和一体化控制的需要,提出了一种基于卡尔曼滤波的单神经元自适应控制方法。该方法利用神经网络高度非线性的超大规模连续时间自适应信息处理系统,在单神经元自适应控制算法的基础上,增加了对控制量和发动机反馈量的滤波,具有很强的非线性映射能力,因而可应用于航空发动机数字式电子调节器中。仿真结果表明,基于卡尔曼滤波的单神经元自适应控制方法具有良好的动静态特性,有效提高了发动机抗干扰能力,而且所需计算量较小,能满足发动机控制对实时性的要求,是一种可替代传统PID控制器的很有希望的智能控制方法。
[1]吴勇.某型发动机综合电子调节器数字化研究与试验[D].西安:空军工程大学,2007.
[2]杨伟.某涡扇发动机控制算法研究与试验[D].西安:空军工程大学,2008.
[3]姚华,王国祥.航空发动机全权限数控系统研究和试飞验证[J].航空动力学报,2004,19(2):247—253.
[4]石斌.航空发动机高可靠性FADEC软件系统技术研究[D].西安:西北工业大学,2004.
[5]Jaw L C,Garg S.Propulsion Control Technology Develop⁃ment in the United States:A Historical Perspective[R]. NASA TM-2005-213978,2005.
[6]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2006:153—154.
[7]张生良.某涡扇发动机综合电子调节器控制规律研究[D].西安:空军工程大学,2003.
[8]张生良,谢寿生.某涡扇发动机综合电子调节器综合测试系统[J].推进技术,2003,24(2):26—28.
[9]钱坤,谢寿生,张伟,等.基于模糊补偿神经网络辨识器的发动机转速控制系统[J].航空动力学报,2006,21(1):213—218.
Single Neuron Adaptive Control System of Aero-Engine Based on Kalman Filter
WANG Wen-zhan1,CHEN Chang-fa2,HU Jin-hai2
(1.Unit 94106,Xi’an 710614,China;2.Engineering Institute,Air Force Engineering University,Xi’an 710038,China)
The single neuron adaptive control method based on Kalman filter is investigated to meet the de⁃mands of multi-mission,multi-variables and high precision of aero-engines.On the basis of single neuron adaptive control algorithm,the Kalman filter method enhances the filter on the control variables and feed⁃back variables to over come the noises on the control performance.The simulation results indicated that the controller obtains satisfactory performance,which is effective inhibition of the filter to the process noise and measurement noise,is a useful tool for the sophisticated multi parameter system.
aero-engine;Kalman filter;single neuron;adaptive control;filtering;noise
V233.7
A文章编号:1672-2620(2012)01-0040-04
2011-05-20;
2011-12-10
王稳战(1964-),男,陕西临潼人,硕士研究生,主要研究方向为飞机推进系统控制与可靠性。
