多热源温度触觉复现装置的设计与实现
2012-06-28王丰华李建清吴剑锋杨宇荣
王丰华 李建清 吴剑锋 杨宇荣
(1东南大学仪器科学与工程学院,南京210096)
(2南京水利水文自动化研究所,南京210012)
多热源温度触觉复现装置主要用来复现人手触摸各种不同温度、不同材质的物体时所产生的不同温度触觉,这种触觉是真实的、基于物理意义的.人手的温度触觉受多种综合性因素的影响,但发生在人手指与物体之间的热量交换的快慢是影响人手指温度触觉的最主要客观因素.如果给定发生接触的2种材质,并且两者接触面积固定,那么热量交换的快慢主要与两者之间的温差有关,温差越大,热量交换就越迅速.所以,可以通过控制给定材质的物体,例如珀尔贴的温度变化过程,来使人手在触摸该给定材质时能产生各种不同的热觉或冷觉[1-3].
为达到灵活复现任意温度曲线的目的,本文将利用热半导体致冷器(珀尔贴)的热电特性来实现.正向导电时,珀尔贴温度升高,反向导电时,珀尔贴温度降低,温度升高或降低的速度与通过玻尔贴的电流大小有关.电流大,这种升降温速度也越大.因此,对珀尔贴温度的灵活控制是该装置的核心技术[4].本装置为了复现多个热源,在系统中安装了多个珀尔贴,同时考虑将来可能装备到机械手上,设计了轻小简便的四路压控恒流源,较好地实现了对于珀尔贴温度的实时精确控制.同时,还装配有力传感器,能实时检测到手与装置的接触以及力的大小[5-7].
1 装置的组成及设计
系统主要由采集控制电路、温度触觉复现人机交互界面以及散热系统构成.
装置中的人机交互界面是由4个边长为15 mm×15 mm的珀尔贴组成,可以同时真实复现4个不同热源的温度触觉感受,可用来模拟人手在接触不同材质、不同温度物体时所产生的不同感觉.电路主要由压力传感采集模块、珀尔贴控制模块以及温度反馈采集电路组成.装置顶部结构的透视图如图1所示.
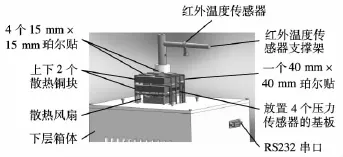
图1 顶部结构透视示意图
复现装置的珀尔贴表面最大升温速率能够达到10℃/s,最大降温速度超过-5℃/s,反馈电路采集一次表面温度的时间为0.1 s,因此能够复现常温范围内、速度不超过最大升降温速的任意温度波形曲线.装置可以复现室温下铝、泡沫、陶瓷、橡胶、有机玻璃等物体的温度触觉.在获取更多温度触觉传感的信息后,可扩大至常温范围内和常见各种物体的温触觉.此外,装置还可以输出手指按压力的大小,与上位机软件配合后可以进行简单的力触觉交互实验.
2 温度触觉复现的原理及特性
首先利用薄膜热电阻来获得恒温环境下(22℃)、人手接触不同材质的物体后所产生的温度变化过程[8],得到的接触面物体一侧的温度变化曲线如图2所示.手指对物体表面有个加热过程,这个过程中与物体进行了热量交换,因此就产生了不同的温度触觉.相对来说,铝感觉比较“凉”的原因是因为其散热较快,而温度上升不快,保持在较低的温度;而泡沫由于导热性差,温度最终接近于手温,因此人手最终感觉不到温度的变化[9-10].

图2 用薄膜热电阻得到的实验原始数据
由于在多热源复现装置中,采用珀尔贴的材质是陶瓷,即外壳是陶瓷,用陶瓷把热电偶封装在内,因此可以认为复现装置与人手指的接触面是陶瓷的.假设要复现铝的热触觉,就要在触摸同等温度、同等大小的陶瓷物体的感觉上给其一个动态的温度修正,这样,人的感觉可能就和铝接近了.基于此思想,根据图2曲线,可以得到同一时刻2条曲线的温度差.陶瓷对铝、泡沫的温度补偿曲线如图3所示.
所以要复现真实的温度感觉,首先要使人手触摸的珀尔贴温度按照相应的曲线进行变化.利用每隔0.1 s从红外温度传感器反馈回来的数据,采用PID控制算法对整个温度曲线变化过程进行了闭环控制,达到了较好的模拟效果.然后进行恒温实验、最大变化速率实验、自然降温实验和各种材质复现曲线实验等,并对复现曲线与原始真实数据曲线进行对比,结果发现数据拟合度很好.

图3 铝和泡沫的温度补偿曲线(原始数据)
对铝的控制曲线如图4所示,图中对比了各个不同PID控制参数所对应的曲线变化过程,可以看出,(0.9,0.12)参数下拟合度更好.

图4 不同PID参数铝补偿曲线的复现
该多热源复现装置珀尔贴面积较小(15 mm×15 mm),几乎与一个成人的手指大小相当,因此在人手指触摸时,红外温度传感器将被手指挡住,无法反馈回必要的控制信息;复现装置最终将用于机器人灵巧手上,由于灵巧手体积小,且也不可能为每一个珀尔贴提供一个反馈控制,因此在实际系统中,必须采用离线的而非具有实时反馈的温度控制.所以,本文测试了在外界条件几乎不变的情况下的离线控制.首先记录具有反馈时生成的PID控制过程数据,称之为“试验模拟”过程,学习完毕后,直接利用此数据进行下一次的温度控制过程,这样在起始条件不变的情况下,整个控制曲线吻合程度比较理想.图5是以铝为例进行复现控制的温度补偿实验曲线,实验首先控制温度达到22℃,然后从复现起始点开始进行温度补偿曲线的复现.
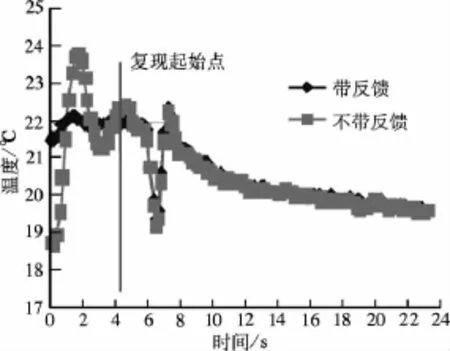
图5 带反馈与不带反馈的铝温度补偿曲线实验
3 多热源温度触觉复现实验
在以上基础上,利用多热源温度触觉复现装置进行了一系列实验,对人手的温度感知特性以及装置的可用性进行了实际检验.
为了测试复现装置对不同材质的区分能力,让10位受试者首先对多热源复现装置的4个热源(铝、泡沫、橡胶、有机玻璃)进行识别,然后打乱4个热源的排列顺序,由受试者根据触摸的感觉来分辨4种物体[11],实验结果如表1所示.

表1 装置复现4种不同热源的实验结果
全部正确分辨出4种物体的人数达7人.感觉错误主要发生在触摸橡胶和有机玻璃上,铝和泡沫的分辨正确率达到了100%.实验结果在一定程度上证明了多热源装置的有效性.
此外,该装置具有复现任意温度曲线的灵活性,因此在实验设计方面有很大的可利用空间.在该装置上还进行了关于人的温度触觉特性的实验研究,例如空间分辨率和时间记忆特性、温度触觉的感知阈值研究等,从另一方面也证明了该装置在温度触觉复现方面的可用性.
4 结语
通过对人体与物体之间接触过程的传热模型、人体生理感觉特性等方面的研究,设计了虚拟现实中基于物理意义的温度触觉复现系统,并提出了采用温度补偿曲线法来真实还原复现人手触碰物体时发生的热量交换所产生的温度触觉,系统中的控温装置和控温算法可以实现精确、快速的各种温度曲线的跟踪.4个可独立工作的温度触觉复现热源既可同时复现人手抓取某一物体时的真实温度感觉,增加沉浸感,又可同时复现分别触摸4个不同物体时的温度触觉,非常灵活.本装置上的力触觉传感器也为虚拟场景中的力触觉交互提供了真实可靠的外界力传感信息.本装置体积小巧,温度触觉复现灵活高效,为下一步在机器人灵巧手上集成真实的温度触觉感觉装置提供了理论依据和实验依据.
本装置取得了较好的温度触觉复现效果,基本上达到了预期的目标,但在复杂多变环境下,还未进行温度触觉再现的研究和心理对温度触觉感知的影响.
References)
[1]Ino Shuichi,Shimizu Shunji,Tetsuro Odagaw A,et al.A tactile display for presenting quality of materials by changing the temperature of skin surface[C]//International Workshop on Robot and Human Communication.Tokyo,Japan,1993:220-224.
[2]Ho H,Jones L A.Material identification using real and simulated thermal cues[C]//Proceedings of the 26th Annual International Conference of the IEEE EMBS.San Francisco,CA,USA,2004:2462-2465.
[3]Jones Lynette A,Ho Hsin-Ni.Warm or cool,large or small?the challenge of thermal displays[J].IEEE Transactions on Haptics,2008,1(1):53-70.
[4]Yamamoto Akio,Yamamoto Hiroaki,Higuchi Toshiro.Thermal tactile presentation with on-site parameter identification of finger[C]//Proceedings of the IEEE International Symposium on Industrial Electronics.Dubrovnik,Croatia,2005:1365-1370.
[5]Song Aiguo,Morris D,Colgate J E,et al.Real time stiffness display interface device for perception of virtual soft object[C]//Proc of Inter Conf on Intelligent Robots and Systems.Edmonton,Canada,2005:139-143.
[6]吴剑锋,宋爱国,李建清.一种三维力反馈手控器[J].传感技术学报,2010,23(10):1417-1420.Wu Jianfeng,Song Aiguo,Li Jianqing.A three-dimensional force reflecting hand controller[J].Chinese Journal of Sensors and Actuators,2010,23(10):1417-1420.(in Chinese)
[7]Fu Yong,Kottenstette N,Chen Yingming,et al.Feedback thermal control for real-time systems[C]//16th IEEE Real-Time and Embedded Technology and Applications Symposium.Stockholm,Sweden,2010:111-120.
[8]Kim Jong-Ho,Choi Woo-Chang,Kwon Hyun-Joon,et al.Development of tactile sensor with functions of contact force and thermal sensing for attachment to intelligent robot finger tip[C]//Proceedings of IEEE Sensors.Daegu,Korea,2006:1468-1472.
[9]Horio Hiroshi,Wada Chikamune.Relationship between the palmar skin's thermal perception and its mechanical characteristics[C]//International Conference on Control,Automation and Systems.Seoul,Korea:1893-1896.
[10]Kim Keehoon,Colgate J Edward,Peshkin Michael A.A pilot study of a thermal display using a miniature tactor for upper extremity prosthesis[C]//Proceedings of the Frontiers in the Convergence of Bioscience and Information Technologies.Jeju Island,Korea,2007:531-536.
[11]Yamamoto Akio,Cros Benjamin,Hashimoto Hironori,et al.Control of thermal tactile display based on prediction of contact temperature[C]//Proceedings of the 2004 IEEE International Conference on Robotic&Automation.New Orleans,2004:1536-1541.
