车联网体系结构及感知层关键技术研究*
2012-06-27钱焕延
王 群 ,钱焕延
(1.南京理工大学计算机科学与技术学院 南京 210094;2.江苏警官学院公安科技系 南京210012)
1 引言
近年来,随着汽车保有量的持续增长,道路承载容量在许多城市已达到饱和,交通安全、出行效率、环境保护等问题日益突出。在此大背景下,汽车联网技术因其被期望具有大幅度缓解交通拥堵、提高运输效率、提升现有道路交通能力等功能,而成为当前一个关注重点和热点。欧洲、美国、日本等国家和地区较早进行了智能交通和车辆信息服务的研究与应用,2011年3月大唐电信科技产业集团与启明信息技术股份有限公司携手共建车联网联合实验室,4月在重庆建立国内首个 “智能驾驶与车联网实验室”等,充分表明当前国内外对车联网(internet of vehicles,IoV)研究的迫切性和广泛性。
物联网是一个以互联网为主体,兼容各项信息技术,为社会不同领域提供可定制信息化服务的具有泛在化属性的信息基础平台[1]。物联网的概念和内涵随着信息技术的发展和不同阶段人们信息化需求的不断演进,因其接入对象的广泛性、运用技术的复杂性、服务内容的不确定性以及不同社会群体理解和追求上的差异性,很难用已有概念和标准来准确完整地给出权威定义。然而,车联网概念的出现,因其服务对象和应用需求明确、运用技术和领域相对集中、实施和评价标准较为统一、社会应用和管理需求较为确定,引起了业界的普遍关注,已被认为是物联网中最能够率先突破应用领域的重要分支,并成为目前的研究重点和热点。
源于物联网的车联网,以车辆为基本信息单元,以提高交通运输效率、改善道路交通状况、拓展信息交互方式,进而实现智能交通管理,使物联网技术这一原本宽泛的概念在现代交通环境中得以具体体现。本文立足物联网基础理论和模型,以构建以信息技术为主导的智能交通系统为背景,对车联网的基本概念、体系结构、通信架构及其关键技术进行研究。
2 车联网概念
车联网是智能交通系统(intelligent transportation system,ITS)与物联网不期而遇后迅速交叉融合的产物。智能交通系统是传统交通运输管理方式发展到一定阶段时的必然需求,而物联网则是互联网在发展过程中遇到瓶颈时在技术和应用上的突破。智能交通系统与物联网走向融合具有明显的信息时代烙印。
2.1 智能交通系统
智能交通系统是在较完善的现代交通基础设施之上,通过运用先进的信息技术、通信技术、传感技术、控制技术、计算机技术及系统集成技术等,加强对以车辆为主要对象的交通运输管理,提高交通运输系统的有序性和综合管控能力,建立一个快速、实时、安全、环保、便捷和舒适的综合交通运输体系,从而最大限度地提升现有道路基础设施的服务能力。
智能交通系统是1994年在全世界范围内开始出现并被广泛采纳的一个概念,这一概念的内涵和外延也在随着技术的发展以及交通运输管理理念的变化而变化。例如,美国从20世纪80年代中期就开始了“智能化车辆道路系统”(intelligent vehicle highway system,IVHS)的研究,1994年IVHS改为ITS,以表明该研究从原来的“车—路”扩展到交通中的各个对象和环节。1998年,日本成立了“车辆信息通信 系 统 ”(vehicle information and communication system,VICS),该系统由先进的交通信息中心和车载信息终端组成,目前日本正在进行的新一代智能交通系统Smartway,其目的是构建一个“人—车—路”一体化的智能信息网络。欧洲在1991年成立的 “欧洲道路交通通信技术应用促进组 织 ”(European road transport telematics implementation coordination organization,ERTICO)已成为推动ITS发展的一个联盟,在第10届ITS世界大会上,ERTICO提出了以车路通信与协同控制为研究重点的eSafety计划,并得到了欧盟成员的一致推崇。我国从20世纪80年代开始研究信息技术在道路交通管理中的应用,已搭建了ITS体系结构,促进了智能交通系统从技术研究到应用示范的转化。
2.2 车联网的概念
物联网到目前为止还没有一个权威的定义,车联网也是如此。本文基于对智能交通系统和物联网已有研究成果的综合分析,提出车联网的基本概念,并进行相应的细节描述。车联网即车辆物联网,是以行驶中的车辆为信息感知对象,通过对智能传感器、无线通信、分布式数据库、信息处理与互联网等技术的综合应用,使人与车、车与车、车与道路基础设施之间实现高效的信息交换与共享,从而对人、车、路和交通设施进行智能管控,进而改善道路交通状况、提高出行效率、延伸信息化应用范围的综合信息服务与智能决策系统。车联网的主体仍然是ITS,只是在ITS的基础上融入了物联网的基因,使车辆具有更丰富和完善的信息技术元素。车联网是一种特殊的无线传感器网络,每一个高速行驶中的车辆节点有规律地分散在城市道路基础设施所限制的范围内,为车辆提供无所不在的网络接入、安全控制、数字多媒体业务、导航、辅助驾驶等服务功能。
例如,作为系统终端的车辆,在ITS中主要通过线圈、地磁、微波、视频、红外、超声波等检测技术和GPS(global positioning system,全球定位系统)技术被动地接收和发送与交通相关的信息,缺乏按需获取的信息交换和共享机制。在车联网中,车辆具有了信息感知功能,可以通过RFID(radio frequency identification,射频识别)、车载信息服务(telematics)、无线定位技术(wireless location technology,WLT)等一系列移动式交通信息采集技术,实时感知车辆自身以及车辆与周围环境的信息,其中主要包括车况及控制系统感知、道路环境感知、车与物的感知、车辆位置感知以及智慧驾驶辅助系统等[2]。在车联网中,车辆不仅提供位置信息,而且能够实时接入城市交通信息网络,随时随地获取道路交通状况,及时选择最佳行车路线。由车载智能终端组成的移动无线自组织网络实现了车辆之间的通信,车辆也可以通过移动IP技术接入互联网,使行车中的人们共享互联网信息。
3 车联网系统架构
3.1 车联网体系结构
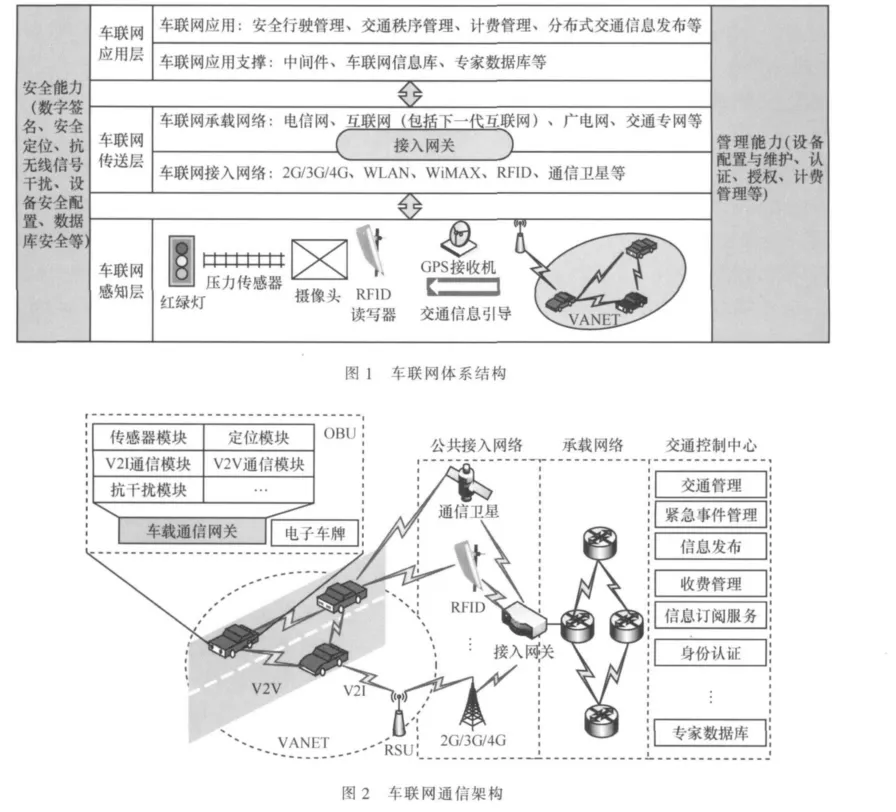
作为物联网的一个重要分支,车联网遵循物联网的体系结构,同样也分为感知层、传送层、应用层3层和安全能力、管理能力2种能力,如图1所示。
(1)车联网感知层
承担车辆自身与道路交通信息的全面感知和采集,是车联网的神经末梢,也是车联网“一枝独秀”于物联网的最显著部分。通过传感器、RFID、车辆定位等技术,实时感知车况及控制系统、道路环境、车辆与车辆、车辆与人、车辆与道路基础设施、车辆当前位置等信息,为车联网应用提供全面、原始的终端信息服务。
(2)车联网传送层
通过制定专用的能够协同异构网络通信需要的网络架构和协议模型,整合感知层的数据;通过向应用层屏蔽通信网络的类型,为应用程序提供透明的信息传输服务;通过对云计算、虚拟化等技术的综合应用,充分利用现有网络资源,为上层应用提供强大的应用支撑。
(3)车联网应用层
车联网的各项应用必须在现有网络体系和协议的基础上,兼容未来可能的网络拓展功能。应用需求是推动车联网技术发展的源动力,车联网在实现智能交通管理、车辆安全控制、交通事件预警等高端功能的同时,还应为车联网用户提供车辆信息查询、信息订阅、事件告知等各类服务功能。
(4)安全能力
车联网的通信特点制约着车联网信息的安全性和通信能力[3]。安全能力为车联网提供密钥管理和身份鉴别能力,确保入网车辆信息的真实性;提供信息的安全保护功能,保证数据在传输过程中不被破坏、篡改和丢弃;提供准确的位置信息,实现对车辆的定位和路径回溯;提供精确的时钟信息,保证车联网实时业务尤其是安全应用在时间上的同步。
(5)管理能力
作为车联网的控制中心,管理能力提供对入网车辆信息和路况信息的管理能力,实现车辆之间、车辆与道路基础设施之间以及不同网络之间的自由、无缝切换;实现车联网通信的QoS管理,根据不同的入网车辆信息及业务类型,提供不同的网络优先级服务。
3.2 车联网通信架构
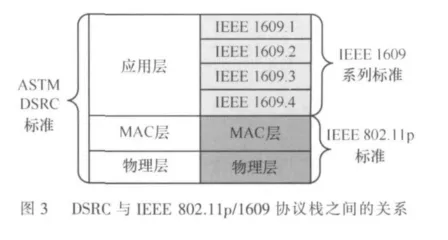
图2所示的是车联网通信架构,其中感知层网络是一类特殊的移动无线传感器网络 (mobile wireless sensor network,MWSN),通过在车辆上安装无线通信设备,将行驶中的车辆变成一个个移动无线网络节点,实现车辆内部各设备(设施)之间、车辆之间以及车辆与道路基础设施之间的高速移动互联。根据组网方式和通信功能的不同,车联网感知层网络分为车域网(vehicle area network,VAN)和车载自组网(vehicular Ad Hoc network,VANET)两种类型。
3.2.1 车域网
车域网即车载局域网,是使用有线或无线方式在车辆内部各设备(设施)之间构建的高度自治的局域网,并通过车载通信网关以无线方式接入周边的公共接入网络,实现车辆内部以及车辆与周边设备之间的直接或间接通信。在VAN中,车内设备 (设施)之间可以利用CAN(controller area network,控制器局域网)总线、LIN(local interconnect network,本地互联网络)总线、蓝牙等方式实现短距离互联与通信。车辆定位模块、车辆信息采集模块、V2V(vehicle to vehicle,车辆与车辆)通信模块、V2I(vehicle to infrastructure,车辆与基础设施)通信模块等需要与外界通信的功能模块,通过车载通信网关并以WLAN、WiMAX、蜂窝通信网络、通信卫星等方式接入被称为 “路侧单元”(road side unit,RSU)的道路基础设施或公共接入网络。车域网的应用,一方面通过信息技术实现了车内设备(设施)的智能集成,将车辆融入网络中;另一方面使网络应用延伸到车辆内部,实现了无线网络边缘的有效扩展。
车域网是一个有线与无线集成、信息采集与处理结合、车内通信与车外信息交换融合的复杂异构网络系统,它是车载单元(on board unit,OBU)的重要组成部分,其主要功能如下。
·车辆定位模块采用卫星接收机获取车辆的实时位置信息,为车辆导航和定位管理提供服务。目前普遍使用的有美国的GPS,同时还有俄罗斯的GLONASS(格洛纳斯系统)、欧洲的Galileo(伽利略)卫星导航系统和我国的北斗卫星导航系统。
·通过安装在车辆的发动机、底盘、车身、电气系统等部位的车用传感器,实时采集车辆行驶过程中的车况信息,例如发动机的进气量、冷却液温度、轮胎气压、车速、车辆行驶方向等。
·V2V通信模块和V2I通信模块分别负责车辆与车辆之间以及车辆与RSU之间的通信,实现 “人—车—路”之间的信息交换,确保行车安全。
·车辆所处环境的电磁干扰比较复杂。通过抗干扰模块,可以解决车辆内部电子元器件之间以及车辆与外界之间存在的电磁干扰,在确保行车安全的同时提供行车中的舒适性。
车载单元中的另一个重要组成部分是电子车牌。电子车牌是对车辆身份的数字化标识,目前主要通过在车辆上嵌入主动式有源RFID标签来实现。与传统的车号牌相比,嵌入了RFID标签的电子车牌不仅能够提供与传统车号牌相同的识别功能,还能够提供车辆拥有者、车辆机械参数、车辆年检情况、车辆环保标志等交通管理的辅助信息。
3.2.2 车载自组网
VANET 是基于 MANET(mobile Ad Hoc network,移动自组织网络)[4]的一类专用于道路交通环境下的网络形式。在VANET中,行驶中的车辆分别被虚拟成一个个移动网络节点,位于道路边的RSU被虚拟成网络静止节点,通过置于移动和静止网络节点的传感器感知和采集交通及周围环境状况。VANET的网络架构可以分为V2V和V2I两部分,其中V2V也称为IVC(inter-vehicle communication,车辆互联通信)方式,可以使车辆实时监测道路上其他车辆的相关信息,并通过车载信息处理设备对信息进行综合分析处理后,为行车安全及智能辅助驾驶提供信息服务。V2I也称为RVC(roadside to vehicle communication,路侧到车辆通信)方式,即建立OBU与RSU之间的通信,车辆通过分布在道路周边的RSU,将收集到的信息汇集到交通控制中心,交通控制中心实现对交通状况的实时监控,实现对全网范围的交通管理,并通过RSU实现收费、定位、发布交通信息等功能。VANET的主要特点如下。
·车辆的高速移动性,决定了VANET中网络拓扑的不稳定性。频繁变化的拓扑结构,使得车辆节点之间路由的生存期大大缩短。为此,车联网中的路由设计和算法实现要比其他类型的MANET复杂得多,传统的基于网络拓扑的路由协议在车联网中将不适用。
·车辆的高速移动性以及受道路周边建筑物和树木的影响,导致车联网的无线信道质量很不稳定。V2V之间以及V2I之间距离的频繁快速变化,产生了严重的多普勒频移效应。例如,当车辆快速经过RSU时,多普勒频移的极性在很短时间内发生反转,从而使前后信号的处理结果间出现较大的误差。
·虽然车辆的高速移动性使车联网变得非常复杂,但与其他MANET相比,受城市道路的约束,车辆节点的移动具有一定的规律性,车辆的行驶轨迹具有可预测性。同时,由于车辆本身提供了较为充足的电力和空间资源,从而对通信设备、传感器、定位设备及其他信息采集处理设备的能耗及集成度要求相对较低。
4 车联网标准化研究现状
随着汽车工业的迅猛发展,道路拥挤和交通事故频发已成为一个全球性的问题,为此,车联网概念一经提出便得到了全社会的普遍关注。在全球许多科研机构、相关组织及汽车制造商进行大量理论研究和实践创新的同时,标准化工作也取得了一定的进展。目前,最具影响的车联网标准主要有专用短距离通信(dedicated short range communication,DSRC)、IEEE 802.11p 标 准 和 IEEE 1609协议栈。
4.1 DSRC
DSRC是一种专用于车联网环境中V2V和V2I之间建立信息双向传输的无线通信机制,具有传输速率高、时延小、支持点对点和点对多点通信等功能。以V2I通信为例,DSRC建立了置于车辆上的OBU与道路周边RSU之间的通信接口规范。在该规范中,通信链路分为上行链路和下行链路两部分,其中从RSU到OBU之间的通信称为下行链路,主要实现OBU从RSU中读取信息以及RSU向OBU写入信息的功能,如电子不停车收费 (electronic toll collection,ETC)系统中的收费记录和余额写入等。从OBU到RSU之间的通信形成上行链路,主要完成RSU从OBU读取信息,实现车辆的自动识别功能等。
1992年,美国材料与试验协会 (American society for testing and materials,ASTM)针对 ETC应用提出了 DSRC技术,采用915 MHz频段,通信范围达到30 m,数据传输速率为0.5 Mbit/s。之后,在全球范围内主要形成了欧洲、美国和日本3大标准体系。2002年和2003年,ASTM分别发布了E2213-02和E2203-03两个DSRC标准,将工作频段设置为5.9 GHz,通信范围扩展到了1 000 m,数据传输速率提升到了6~27 Mbit/s。欧洲于1994年由CEN/TC278工作组开始DSRC标准的起草,1997发布了ENV12253“5.8 GHz DSRC物理层”和ENV12795“DSRC数据链路层”两个标准。1997年日本TC204工作小组完成了DSRC标准起草工作,并于2001年和2004年分别发布了ARIB STD-T75和ARIB STD-T88两个标准,使用的是700 MHz频段。需要说明的是,DSRC迄今为止还没有形成统一的国际标准。
4.2 IEEE 802.11p标准和IEEE 1609协议栈
为了加快DSRC的标准化进程,促进产业化发展。2004年IEEE成立了车辆通信环境下的无线接入(wireless access in the vehicular environment,WAVE)工作组,具体负责在现有5.9 GHz频段DSRC的基础上针对车联网中V2V和V2I对高数据速率和高速移动性的通信要求,设计一个全球范围内通用的标准,该标准即为于2010年7月正式发布的IEEE 802.11p标准。IEEE 802.11无线局域网(WLAN)标准存在信号覆盖范围小、服务质量(quality of service,QoS)支持能力弱、无法对多媒体信息提供高质量的支持、难以适应车辆高速行驶过程中信道的频繁切换等缺点,所以IEEE 802.11标准无法直接应用到车联网。IEEE 802.11p通过对IEEE 802.11标准的扩展和补充来适应车联网V2V和V2I的通信要求,如先进的信息传输机制、高速移动互联、增强的安全性和身份认证等[5,6]。
由于DSRC和IEEE 802.11标准在体系结构上的非对称性,IEEE 802.11p标准主要规定了DSRC协议的物理层(PHY)和介质访问控制层(MAC)标准[7],DSRC 协议中的上层功能由IEEE 1609协议栈实现,协议对应结构如图3所示。
IEEE 1609协议栈由IEEE汽车技术学会智能运输系统委员会发起,是以IEEE 802.11p通信协议为基础的高层系列标准,其主要目的是制定一个车联网中V2V和V2I通信的标准规范,该规范提供了自动收费、资源管理、安全服务等服务标准。表1列出了现有的IEEE 1609系列标准的功能描述。
5 车联网关键技术
5.1 物理层
与其他无线通信方式相比,车联网的物理层相对复杂。当车辆行驶在城市道路环境中时,无线信号在传播过程中因受城市建筑物等复杂环境的影响,承载相同信息但经过多个不同路径到达接收机的信号通过矢量叠加后合成时变信号,从而产生多径衰落现象。多径衰落会严重影响V2V和V2I通信质量。当车辆在高速公路上行驶时所引起的信道时变以及多普勒频移现象,将引起无线信道的突变,使接收机的误差增大,所以当一些传统的相对稳定的无线通信方式应用到车联网环境时将会引起许多问题。为此,研究支持高速移动性、具备多跳连接、提供安全可靠的信息交互方式、确保通信实时性的适应车联网特定环境的物理层规范是车联网中一个重要的研究方向。
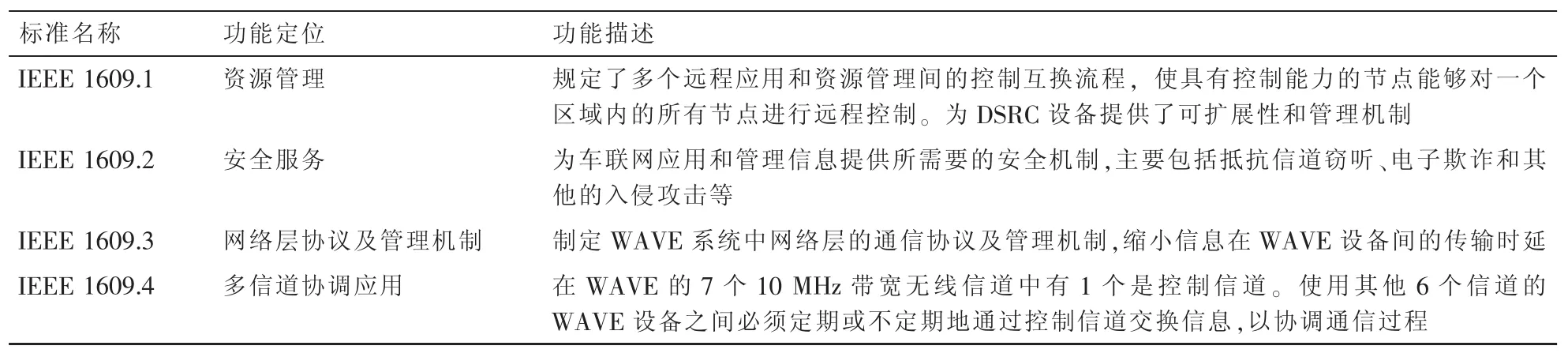
表1 IEEE 1609系列标准功能描述
IEEE 802.11p是目前专门针对车联网物理层推出的通用标准。IEEE 802.11p物理层使用IEEE 802.11a中确定的正交频分复用(OFDM)技术,以降低多径衰落和多普勒频移带来的码间干扰。IEEE 802.11p对IEEE 802.11a进行了修改,通过在物理层上扩大数据帧的保护间隔,以便能够容纳更大的均方根时延(RMS),进而支持更高速率的移动性,以满足车联网物理层通信要求。表2是IEEE 802.11a与IEEE 802.11p物理层参数对比[5]。
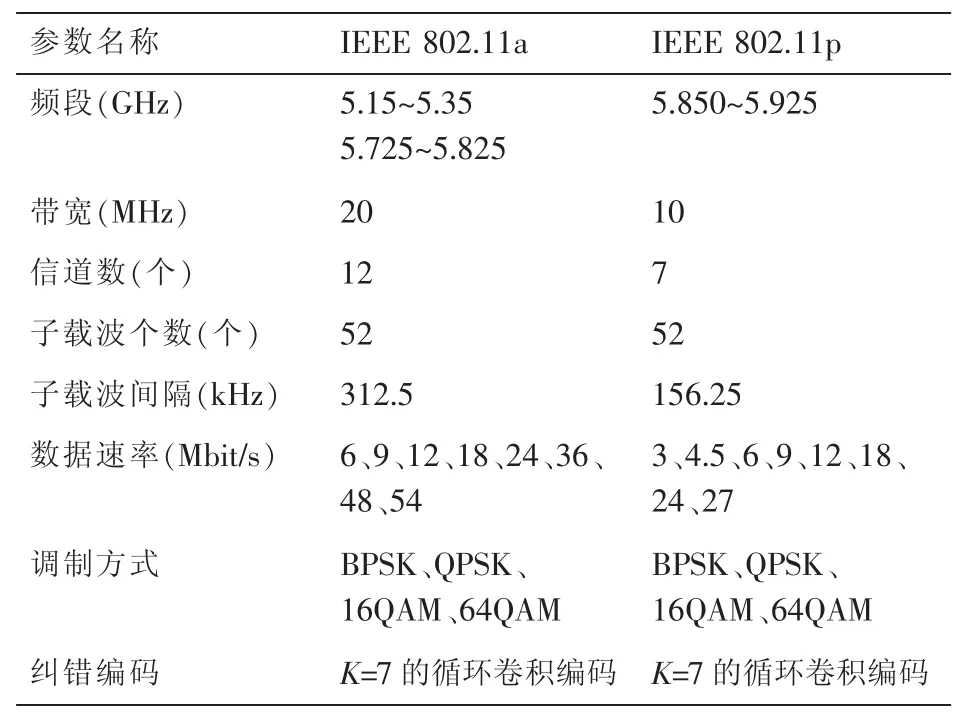
表2 IEEE 802.11a与IEEE 802.11p物理层参数对比
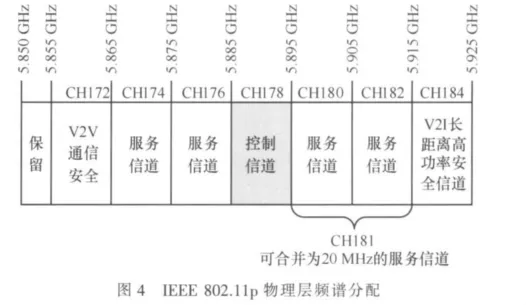
IEEE 802.11p物理层采用5.850~5.925 GHz频段,共75 MHz的频段资源被划分为7个子信道,其中1个控制信道(CCH)负责安全消息的传输,另6个服务信道(SCH)负责非安全服务消息的传输,每个信道的带宽为10 MHz,频谱分配如图4所示。由于安全和非安全消息在车联网中共存,为了确保车联网的安全性,必须让服务信道能够随时接收到控制信道的消息,随时接受服务管理。
5.2 介质访问控制层
传统无线网络的介质访问控制(MAC)层所面临的隐藏和暴露终端与资源分配等问题在车联网中同样存在,而且所产生的后果更加严重。与传统无线通信网络相比,车联网的MAC层必须具备:支持高速移动性、通信的实时性和可靠性、较高的带宽利用率、采用分布式自组网方式、通信机会公平、提供高效且及时的广播机制等特征[8,9]。在传统无线网络中应用的MAC层协议主要有CSMA/CA(carrier sense multiple access with collision avoidance)、ALOHA和令牌环,目前针对车联网V2V和V2I通信的MAC层协议也基本上是对已有协议的改进,如Ad Hoc MAC 协议[10]、D-MAC(directional MAC)协议[11]、CMV(cognitive MAC for VANET)协 议[12]、A-ADHOC MAC 协 议[13]、RRALOHA (reliable reservation-ALOHA)[14]和 Secure VANET MAC协议[15]等。IEEE 802.11p MAC层协议的基础仍然是IEEE 802.11的CSMA/CA,为了适应车联网的特殊应用需求,在管理实体、接入优先级和介质访问控制方式等方面进行了相应的改进[16]。
(1)IEEE 802.11p MAC 层管理实体
在IEEE 802.11中设计了相对独立的物理层管理实体(PLME)和MAC层管理实体(MLME),不同服务实体之间的操作通过服务访问点 (SAP)实现。IEEE 802.11p在MLME中定义了一个名为“dot11ocb”的管理信息库(MIB),在车联网管理中,当需要向IEEE 802.11p设备添加额外的“选项/约束”条件时可将“dot11ocb”设置为“enabled”状态,然后根据管理需要进行配置。其中,“选项/约束”主要包括“认证/无认证服务”和“数据保密”两种类型。
(2)接入优先级
IEEE 802.11p标准采用了IEEE 802.11e中的EDCA(enhanced distributed channel access,增强的分布式信道访问)机制来解决车联网应用中的优先级问题,让安全预警、辅助驾驶等紧急消息可以被赋予高优先级,使其优先使用信道,而交通信息、普通IP业务等实时性要求不高的消息可以设置较低的优先级,让其缓存后发送。EDCA机制满足了车联网应用的QoS管理要求。
(3)介质访问控制方式
以太网中采用的CSMA/CD无法区分优先级,不存在可靠性保障。IEEE 802.11中采用的CSMA/CA虽然提高了传输的可靠性,但时延过大,无法满足车联网实时通信要求。针对这一问题,IEEE 802.11p采用了OFDMA-CSMA机制,通过对每一个子载波组分配单独的CSMA来实现低时延和高可靠性。
5.3 路由协议
车联网环境中车辆的快速移动和车流分布信息的动态变换都会导致通信链路的频繁变化,从而使建立路由源节点(发送信息的车辆)到目的节点(接收信息的车辆)的通信链路变得非常复杂,刚刚建立的信息传输路径稍纵即逝。因此,必须在借鉴传统Ad Hoc网络中多跳路由已有研究成果的基础上,设计开发适合车联网环境的路由协议。根据目前的研究成果,适用于车联网中的路由协议主要分为以下3种类型。
5.3.1 按需路由协议
根据路由发现策略的不同,可将路由协议分为先应式路由协议和按需路由协议两种类型。先应式路由协议也称为表驱动路由协议,网络中的每个路由节点通过周期性地发送“Hello”广播报文来告知和探测邻居节点,从而在每个路由节点上形成并维护一张反映全网拓扑信息的路由表。当网络中的某一节点发生变化时,根据不同的路由算法或策略,网络中的其他节点将会接收到这一事件信息并重新计算和更新自己的路由表,以便及时维护正确的路由信息。当网络规模较大时每个路由节点需要维护的路由信息量将很大,当网络拓扑频繁变化时大量的广播报文会占用过多的网络带宽资源,使得路由协议的效率快速下降。
按需路由协议也称为被动型路由协议或反应式路由协议,它是根据数据的发送要求,被动地搜索从源节点到目的节点的最佳路由,而在数据发送结束或没有数据发送时,节点并不需要维护路由表。按需路由协议是Ad Hoc网络特殊的路由协议类型,它可以降低系统开销,提高网络吞吐量。但是,按需路由协议具有许多潜在的不确定性,进而影响协议的可靠性和应用的安全性。例如,从源节点到目的节点之间能否建立路由、建立路由需要多长时间都无法确定,这种不确定性为车联网应用带来了安全隐患。
为此,反应式路由协议不适合于车联网应用,而按需路由协议也仅仅适应于规模不大、节点移动速率较小、安全性要求不高的车联网环境。
5.3.2 分层路由协议
根据所形成网络结构的不同,可将路由协议分为平面路由协议和分层路由协议两种类型[17,18]。在平面结构中,所有节点在网络中的地位是平等的,不存在层次上的差异性,一般不存在瓶颈问题,具有较强的顽健性。而分层结构中采用簇的机制对节点进行分层管理,将在地域范围内相邻的节点组成一个簇,每个簇有一个簇首,簇与簇之间借助于各自的网关节点进行通信,由簇首和网关构成了高层的虚拟骨干网。典型的分层路由协议有CBRP(cluster based routing protocol)[19]、CL-DSR (reliable dynamic source routing based cluster label)[20]和AOW(automatic on demand weighted clustering algorithm)[21]。
分层路由协议具有较强的可扩展性,适应于大规模的网络环境,可较好地实现对移动节点的管理。所以分层路由协议较适用于车联网环境。
5.3.3 地理位置辅助路由协议
根据是否使用地理位置信息作为路由发现和维护的依据,可将路由协议分为地理位置辅助路由协议和非地理位置辅助路由协议两种类型。非地理位置辅助路由协议需要管理路由表或存储路径,需要获知并建立节点之间的路径信息,是传统网络中普遍使用的路由协议类型。随着GPS等定位技术的应用和道路通信基础设施的不断完善,地理位置辅助路由协议成为车联网中研究的一个重点。根据所采用的地理位置信息的不同,地理位置辅助路由协议主要分为以下两种类型。
(1)贪婪路由
贪婪算法(greedy algorithm)是一种解决最优化问题的近似方法。贪婪算法的实现分为不同的阶段,每一阶段根据相应的贪婪准则(greedy criterion)会得到一个解决本阶段问题的最优解,最后将各阶段的最优解依次关联起来便得到整个过程的最优解。2000年,哈佛大学的Brad Karp等人提出了 GPSR(greedy perimeter stateless routing)[21]协议,成功地将贪婪算法与地理位置信息有机结合起来,应用到车联网感知层网络的路由协议中。贪婪路由的思想是:节点周期性地广播包含自身身份标识和当前实时地理位置坐标的报文,通过对接收到的广播报文的综合分析和参数设置,每个节点便可以建立邻居节点列表。当一个节点要发送数据时,首先查找自己的邻居节点列表来发现到达目的节点所有路径中最近的一个直联相邻节点,然后将数据发送给该节点,接收到数据的节点采取同样的方法继续选择下一个直联邻居节点,直到数据到达目的节点为止。由于省略了路由选择的复杂穷举过程,所以贪婪路由的效率较高。
(2)锚路由
虽然城市道路周边复杂的环境对信号传输产生的影响较大,但城市道路交通网络的分布具有规律性和存在时间上的相对稳定性,为此将道路交通拓扑信息引入路由选择成为车联网的一个研究方向。2003年由Christian Lochert等人提出的 GSR(geographic source routing)[22]协议成为地理位置辅助路由协议的一个典型案例。在GSR协议中,由从源节点到目的节点间的道路十字路口组成锚节点序列,然后将GPSR协议中原来从计算直联邻居节点和目的节点之间的距离,改为计算直联邻居节点和距离目的节点较近的下一个锚节点之间的距离,再将距离下一个锚节点较近的邻居节点作为路由的下一跳。在GSR协议中,两个锚节点之间仍然通过贪婪算法确定路由。通过这种方法,信息将沿着道路拓扑传输,降低了城市道路环境对车联网通信质量的影响。
在前人研究的基础上,如何将道路范围内的车流密度、车辆的运行速度和方向等参数以及道路周边的通信基础设施引入路由实现过程成为一个新的研究热点。例如,2008年由 Kevin C Lee等人提出的 LOUVER(landmark overlay for urban vehicular routing environments)[24]协议在 继承了GPSR协议贪婪路由算法的基础上,引入车辆自主感知车辆密度的方法来辅助路由选择,为车联网路由协议的设计开发提出了一种新的思路。
6 结束语
近年来,车辆的迅猛增长与人们无处不在的信息通信要求将原本互不相干的通信网络与汽车紧密结合起来,从而促进了车辆向网络化、智能化方向发展。目前,车联网在国内外还处于起步阶段,真正具有“智慧”功能的车联网应用仅存在于实验环境或小范围内,即使是智能交通管理、ETC、车辆信息采集、车辆测速等具有车联网基本要素的应用也限于一个城市或城市的某一特定范围。现有的研究和应用,距离真正实现车联网中最重要的V2V和V2I通信管理还存在很大的差距,基于传统理论与技术的研究和设计开发方法难以有效解决车联网系统的核心问题。为此,立足车联网的泛在化属性,打破常规的方法和模式,通过创建系统、科学的理论模型,探索规范有效的理论和方法体系,是实现车联网应用的基础和必由之路,也是研究人员的努力方向。
1 王群,钱焕延.物联网的技术路线及属性形成.电信科学,2012,28(7):86~93
2 《货运车辆》研究部,华夏物联网研究中心.中国货运车联网技术与产业发展报告.货运车辆,2012(1):7~103
3 Du Wenliang,Deng Jing,Huan Y S,et al.A pair wise key predistribution scheme for wireless sensor networks.Proceedings of the 10th ACM Computer and Communications Security(CCS’03),Washington,DC,USA,October 2003
4 Corson J,Macker J.Mobile Ad Hoc Networking(MANET):Routing Protocol Performance Issues and Evaluation Considerations.RFC 2501,January 1999
5 ASTM E2213-03.Standard Specification for Telecommunications and Information Exchange between Roadside and Vehicle Systems-5 GHz Band Dedicated Short Range Communication(DSRC)Medium Access Control (MAC)and Physical Layer(PHY)Specifications,2003
6 Xiang W,Richardson P,Guo J.Performance evaluation of wireless access in vehicular environments (WAVE)systems for dedicated short range communications (DSRC).IEEE Wireless Communication Magazine,2009(12)
7 Cherif M O,Senouci S M,Ducourthial B.Vehicular network selforganizing architectures.Proceeding ofthe5th IEEE GCC Conference&Exhibition,Kuwait City,March 2009
8 常促宇,向勇,史美林.车载自组网的现状与发展.通信学报,2007,28(11):116~126
9 罗涛,王昊.车辆无线通信网络及其应用.中兴通讯,2011,17(3):1~7
10 Borgonovo F.Ad Hoc MAC:a new MAC architecture for Ad Hoc networksproviding efficientand reliable point-to-pointand broadcast services.Wireless Networks,2004(7)
11 Ko Y B.Medium access control protocols using directional antennas in Ad Hoc networks.Proceedings of IEEE INFOCOM,Tel Aviv,Israel,March 2000
12 Seung-eun Chung,Joon Yoo,Chong-kwon Kim.A cognitive MAC for vanet based on the wave systems.Advanced Communication Technology,2009(1):41~46
13 Liu J,Ren F Y,Miao L M,et al.A-ADHOC:an adaptive realtime distributed MAC protocol for vehicular Ad Hoc networks.Mobile Networks and Applications,2011,16(5):576~585
14 Borgonovo F,Capone A,Cesana M.RR-ALOHA:a reliable R-ALOHA broadcast channel for Ad Hoc inter-vehicle communication networks.Proceedings of Med-Hoc-Net,Sardegna,Italy,July 2002
15 Qian Y,Lu K J,Nader M.A secure VANET MAC protocol for DSRC applications. Proceedings of IEEE Globecom,New Orleans,LA,USA,December 2008
16 IEEESTD.2010.5514475.IEEE Standard for Information Technology-Telecommunications and Information Exchange between Systems-Local and Metropolitan Area Networks-Specific Requirements Part 11:Wireless LAN Medium Access Control (MAC)and Physical Layer (PHY)Specifications Amendment 6:Wireless Access in Vehicular Environments,July 2010
17 Wahid N,Luiz A S,Denis T.Adaptive approaches for efficient parallel algorithms on cluster-based systems. International Journal of Grid and Utility Computing,2009,1(2):98~108
18 胡淼,李剑峰.车辆自组织网络中基于贪婪算法的地理位置路由.中兴通讯,2011,17(3):24~28
19 Yu T Y,Chong P H J, Zhang M.Performance of efficient CBRP in mobile AdHoc networks (MANETS). Proceedingsof Vehicular Technology Conference, Calgary, Alberta, Canada,September 2008
20 Lu X B, Zhou L Y.A reliable dynamic source routing based clusterlabelin mobile Ad Hoc networks.Proceedingsof Vehicular Technology Conference,Barcelona,Spain,April 2009
21 Chatterjee M,Sas S K,TurgutD.An on-demand weighted clustering algorithm(WCA)for Ad Hoc networks.Proceedings of Global Telecommunications Conference,GLOBECOM'00,San Francisco,USA,November 2000
22 Brad K,Kung H T.GPSR:Greedy perimeter stateless routing for wireless networks.Proceedings of the 6th Annual International Conference Mobile Computing and Networking(MOBICOM’00),Boston,MA,USA,August 2000
23 Christian L,Hannes H,Jing T, et al.A routing strategy for vehicular Ad Hoc networks in city environments.Proceedings of the IEEE Intelligent Vehicles Symposium(IVS’03),Columbus,OH,USA,June 2003
24 Kevin C L,Michael L,Jérǒme H,et al.LOUVER:landmark overlays for urban vehicular routing environments.Proceedings of the 68th Vehicular Technology Conference(VTC-Fall'08),Calgary,Canada,September 2008
