一种新的高精度帆板倾角控制系统设计方案
2012-06-25邓彬伟邱云翔
杨 波 邓彬伟 李 滦 邱云翔
(黄石理工学院电气与电子信息工程学院,湖北黄石435003)
传感器在现代信息技术中起着重要的作用,系统在进行处理和决策时必须由传感器来获取必要的原始信息[1],传感器的性能极大的影响和决定了系统的性能。本设计以MSP430F149 为控制核心[2-4]、以 SCA103T-D05高精度倾角传感器为角度探测器,采用直流电机和专门设计的风道,并通过按键控制对帆板角度进行实时控制与显示。系统性能稳定、控制精准、设计新颖,经专家测试和评审获得2011年全国大学生电子设计竞赛全国一等奖并获得湖北省“TI”杯。
1 系统方案
1.1 系统总体方案设计
系统以MSP430单片机为控制核心,高精度SCA103T-D05倾角传感器为倾角探测器[1,5],采用直流电机带动风扇旋转,通过操作矩阵键盘控制风力大小,使帆板转角θ能够在0~60°范围内变化,并通过液晶12864实时显示帆板转角大小,系统框图如图1所示。
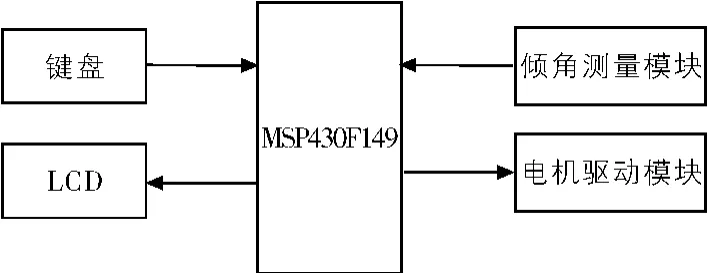
图1 系统框图
1.2 设计方案论证
1.2.1 倾角测量模块
方案1:采用陀螺仪ENC-03M角速度传感器,它是一种应用科氏力原理的角速度传感器,可输出一个和角速度成正比的模拟电压信号,体积小,响应快。但测量精度较低,分辨力只能达到10°左右,不能满足设计要求,故不采用此方案。
方案2:采用 MMA7455数字加速度角度传感器。低功耗,输出精确,具有信号调理、低通滤波、温度补偿、自测以及快速运动检测等功能。但其分辨力较差,很难满足精度要求。
方案3:采用SCA103T倾角传感器。设计稳健、高冲击强度、耐久性高,且具有极高的精准度和极低的温度依赖性,并且提供SPI数字接口[6],可以直接读取采集到的数据,设计简单方便。
通过以上分析,选择方案3。
1.2.2 电机模块
方案1:采用步进电机,步进电机扭力较大,转速稳定。但转速太慢,达不到系统要求。
方案2:采用直流电机,直流电机能提供较高的转速,噪音小,性价比高且外围硬件结构简单,便于实际操作。
通过以上分析,选择方案2。
1.2.3 风向控制模块
方案1:采用圆筒形风罩,可使风力集中作用在帆板上,提高风力利用率,但不能提高风向稳定性。
方案2:采用百叶窗形风罩,一方面可使风力集中作用在帆板上,另一方面可调整风向,使风向由螺旋型转变为相互平行型,使帆板均匀受力,提高了帆板的稳定性。
通过以上分析,选择方案2。
2 理论分析与计算
2.1 角度测量原理
本设计采用 SCA103T倾角传感器,其测量范围是 ±30°,要求的测量范围为0~60°。因此本设计将倾角传感器与帆板成60°角固定在转轴上,当帆板偏转角为0°时,倾角传感器与水平面成-30°;当帆板偏转90°时,倾角传感器与水平面成+30°。
具体测量转换根据公式(1):

式(1)中,α表示倾角;LSB指数字数据是低位在前;Dout是单片机采集到的传感器12位数字数据;Dout@0°指的是倾角传感器在水平时输出的数字数据值;Sens[LSB/g]指倾角传感器标准灵敏度,对于SCA103T-D05值为3277,其中g指重力加速度。
2.2 风扇控制及控制算法
首先将60°分为12等分,通过实验找出每一等分所对应的占空比,得到一个数据表格。键入设定值后,用查表法得出对应的占空比以实现粗调。传感器实时检测当前帆板偏角,利用逐次递进法实现细调。当系统稳定后,系统进入自动校验状态,保存当前度数所对应的占空比,得到一个新的数据表,以便下次调用,从而快速精确达到设定的效果。
3 电路与程序设计
电路与程序设计分为风扇控制电路设计与计算、软件设计和整体电路设计。
3.1 风扇控制电路设计与计算
电机驱动模块如图2所示。驱动电路由光耦、L298N、二极管构成。其中 L298N专用于驱动集成电路,可以驱动大功率的直流电机,在电路中加入二极管的作用是在产生反向电流时进行泄流,保护芯片安全。L298N的输入端可与单片机直接相连。为了避免电机对单片机的干扰,L298N模块加入光耦,进行光电隔离,从而使系统处于稳定的工作状态。
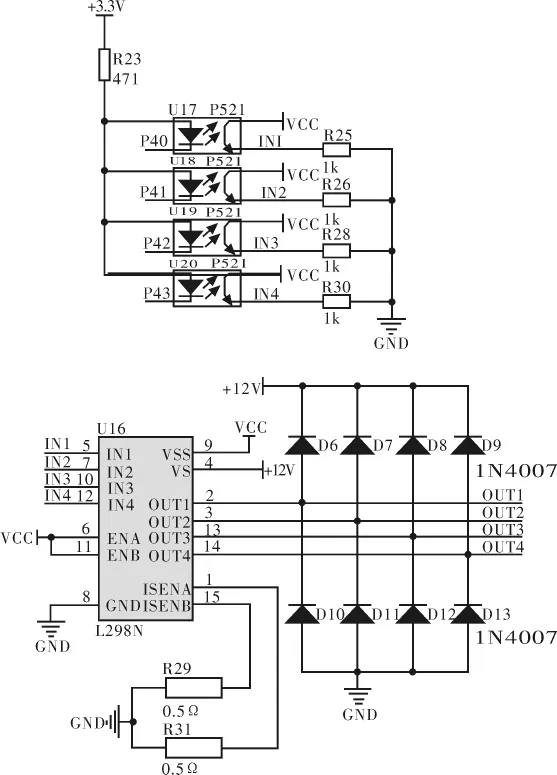
图2 电机驱动模块
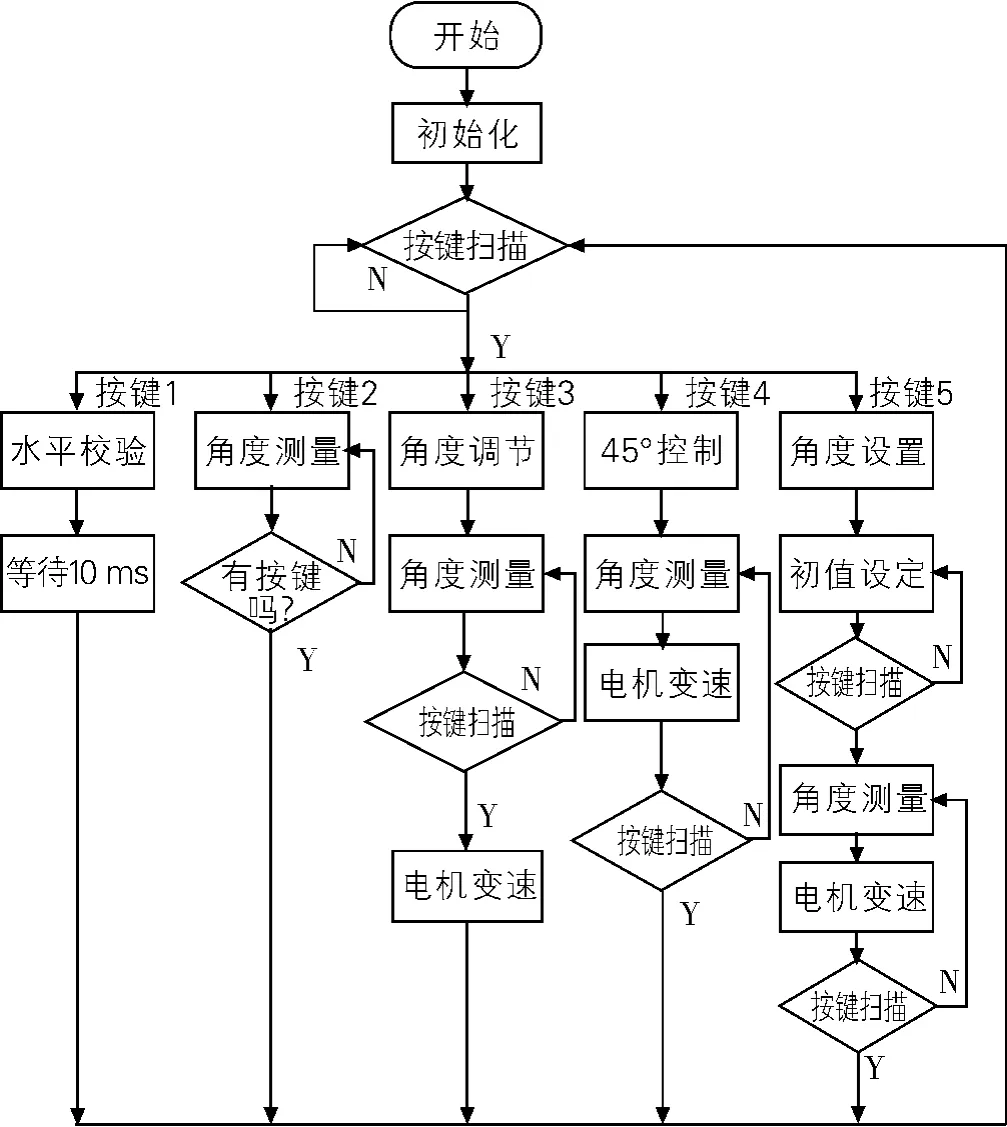
图3 软件流程
电机的额定电流I=0.5 A;
电路中电阻R=24 Ω;
电机有效电压最大值U=12V;
由欧姆定律得通过电机的最大电流I=U/R=12V/24 Ω =0.5 A。
3.2 软件设计流程
软件流程如图3所示。
4 测试方案与测试结果
4.1 测试仪器
测试仪器有:秒表、量角器、直尺。
4.2 系统测试方法及测试数据
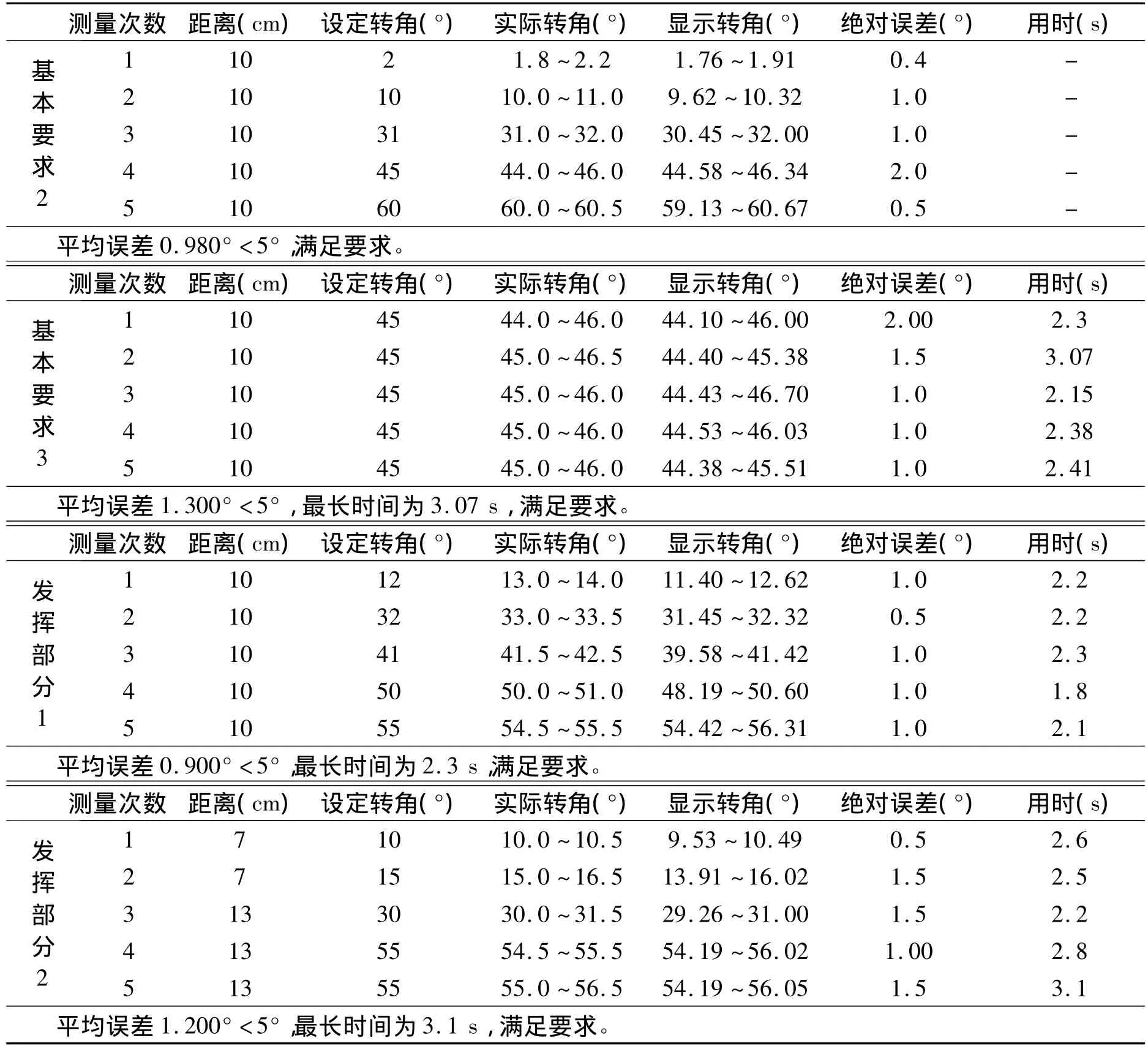
将量角器固定在支架上,以便于直接读出实际转角。先手动转动帆板,观察实际转角与显示转角。然后利用键盘输入一个角度,通过单片机对电机控制调节帆板的转角。待系统稳定后,再测量帆板实际转角,与显示屏上的度数进行对比,以此来验证系统的准确性。测试数据见表1。
4.3 测试结果分析
测量结果表明在不同的距离下都能实现高精度,最大误差为2°;响应速度快,到达设定的最长时间为3.1 s,完全达到了设计要求。

表1 帆板转角测试数据
续 表
5 总结
为提高系统的稳定性,将固定帆板的支架设计成三角形,可减小因风力作用造成的帆板晃动,将固定帆板的支架与固定电机的支架分开,可减小电机的震动对帆板的影响。在风扇前加了一个整流风罩,可使风力平行均匀的作用在帆板上,大大提高了系统的稳定性。经过测试,倾角传感器的测量范围为0~60°。分辨力为0.01°,帆板能够在较短时间内达到预先设定的角度,测量的绝对误差在2°以内。
[1]叶贞贞.角度传感器简单应用系统[J].科技致富向导,2010(15):48-49
[2]沈建华,杨艳琴,翟骁曙.MSP430系列16位超低功耗单片机实践与系统设计[M].北京:清华大学出版社,2005:125-185
[3]胡大可.MSP430系列单片机C语言程序设计与开发[M].北京:北京航空航天大学出版社,2001:50-85
[4]李智奇.MSP430系列低功耗单片机原理与设计[M].西安:电子科技大学出版社,2008:100-150
[5]赵健,吴顺伟,任志舶.基于倾角传感器的自动平衡系统[J].现代电子技术,2008(16):192-194
[6]黄志文,邓彬伟.串行A/D与8255A接口的设计与实现[J].黄石理工学院学报,2007(3):34-37
