基于雷达图像的水面无人艇目标检测技术
2012-06-23庄佳园徐玉如万磊廖煜雷孙寒冰
庄佳园,徐玉如,万磊,廖煜雷,孙寒冰
(哈尔滨工程大学水下智能机器人技术国防科技重点实验室,黑龙江哈尔滨15001)
水面无人艇,简称无人艇或USV(unmanned surface vehicle),它的研发晚于陆地机器人、无人机和水下机器人,目前已有多种无人艇应用于军事、科研等领域[1].文献[2-3]总结了无人艇的研究历史、现状以及发展趋势.目前无人艇的典型代表主要有:美国的“SPARTAN”号、以色列的“Protector”号、意大利的“Charlie”号双体型 USV[4]和英国的“Springer”号双体型 USV[5]、葡萄牙的“Delfim”号双体型USV等.
航海雷达在无人艇可用于测定船位、规划避碰、目标探测等.Shi等使用雷达信息补偿人的视觉在海洋搜索和救援中的不足[6],Almeida等利用航海雷达融合其他传感器探测障碍物并避碰[7],Elena等将航海雷达用于无人艇的近岸巡逻[8].以上应用都是建立在目标检测、跟踪和识别等问题的基础上.实际上航海雷达图像由于受到海洋环境和天气变化的影响,图像序列中有的目标时隐时现并伴随一些虚假目标;雷达图像帧间间隔较长,造成一些运动参数(如加速度)连续性不好.这些问题都影响了航海雷达在无人艇上的应用.
首先讨论了嵌入式雷达图像采集处理系统的体系结构.在检测出目标并计算对应位置信息的基础上,基于航海雷达图像中目标的特点提取目标的位置、面积、不变矩特征,在图像序列中进行目标特征匹配,建立目标链.利用卡尔曼滤波实现目标位置的预测,以弥补目标在雷达图像序列中可能会偶然丢失的缺点,防止目标链的断裂.最后试验验证了系统的有效性.
1 嵌入式雷达图像采集处理系统
研究平台为单体滑行艇式无人艇.该USV系统是为了实现自主航行、智能规划、作业任务而研制的无人试验平台.同时也可以应用到多种无人平台(即无人艇、水下机器人、无人机等)的编队航行和协同作业等多智能体联合控制研究中.
航海雷达和嵌入式雷达图像采集处理系统作为本试验平台的重要组成部分,是实现平台环境感知、安全航行、目标探测的关键所在.无人艇图像采集处理系统由航海雷达及嵌入式计算机系统(硬件角度)和嵌入式图像处理系统(软件角度)组成,下面分别就这2个方面进行阐述.
1.1 硬件体系结构
本无人艇平台使用的航海雷达为Raymarine公司生产的E80数字雷达,具有抗干扰能力强、图像质量高等优点,可以同步输出VGA雷达图像视频.
硬件体系结构如图1所示.
嵌入式计算系统由基于PC/104总线的多板嵌入式系统组成,包括基于Intel Pentium M处理器的PC模块,基于PC/104总线的视频采集卡以及一个提供5 V电压的电源模块.
嵌入式PC/104模块中采用Wind River公司的实时多任务操作系统VxWorks.它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等对实时性要求极高的领域中.
运动控制系统采集到电子罗经的艏向角数据、GPS系统的位置和航速数据,处理后通过网络交换机传送给图像采集处理系统.图像采集处理系统计算雷达探测目标的位置信息和速度参数,提供给路径规划系统.路径规划系统对目标进行评估,规划航线后向运动控制系统发送基础控制指令.
1.2 软件体系机构
嵌入式图像处理系统主要由图像处理模块、目标特征提取和匹配模块、卡尔曼滤波目标位置预测模块组成.

图1 无人艇雷达图像采集处理系统硬件体系结构Fig.1 The hardware architecture of USV radar image acquisition and processing system
软件体系结构如图2所示.

图2 无人艇雷达图像采集处理系统软件体系结构Fig.2 The software architecture of USV radar image acquisition and processing system
图像处理模块通过图像的平滑、分割、标记实现雷达图像中目标的检测,并计算出目标的位置信息.目标特征提取和匹配模块完成目标位置、面积、不变矩特征的特征值提取,在雷达图像序列中通过特征匹配找到不同帧中的同一目标,实现目标的跟踪,建立目标链.卡尔曼滤波目标位置预测模块实现目标位置信息的预测,用预测的位置值来弥补目标丢失而缺少的位置信息,建立完整的目标链.
2 雷达图像目标检测
结合航海雷达图像的特点,重点研究了适合航海雷达图像特征的图像处理、目标检测和目标特征提取算法.
2.1 雷达图像的处理
在进行雷达目标检测、目标跟踪等处理之前,首先对雷达图像进行图像处理,其中包括雷达图像的平滑和雷达图像分割.
采用一种图像边缘保持的去噪平滑算法,这种去噪平滑算法综合了中值滤波和加权平均法的优点,可以弥补传统去噪平滑算法的不足[9].针对航海雷达图像帧与帧之间图像亮度会发生变化的特点,使用 Ridler自适应阈值法作为图像分割算法[10].雷达图像处理效果如图3、图4所示.

图3 处理前雷达图像Fig.3 Radar image before processing

图4 处理后雷达图像Fig.4 Radar image after processing
2.2 雷达图像目标提取
由于雷达图像处理的实时性较高,因此要求对雷达图像的处理和目标信息的提取有较高的执行速度,算法要能够在较短的时间内完成对目标的标识,从而提取出目标信息.而目前常用的几种标记算法都有本身的缺陷.综合线标记法和区域增长法的优点采用一种执行效率较高的标记算法[11].
本算法以同一行中所有连通的像素作为种子段,只需判断种子段的上下2行是否存在与种子段连通的目标段,避免了区域增长法中对每个种子点做8邻域判断所需的大量运算,同时本算法不会产生同一连通区标记冲突的情况,也避免了对冲突标记重新标记的费时的计算,因此这种算法较目前常用的线标记法和区域增长法执行效率有了较大提高.用本标记算法对图3雷达图像进行标记并由近及远对目标排序,效果如图5所示:
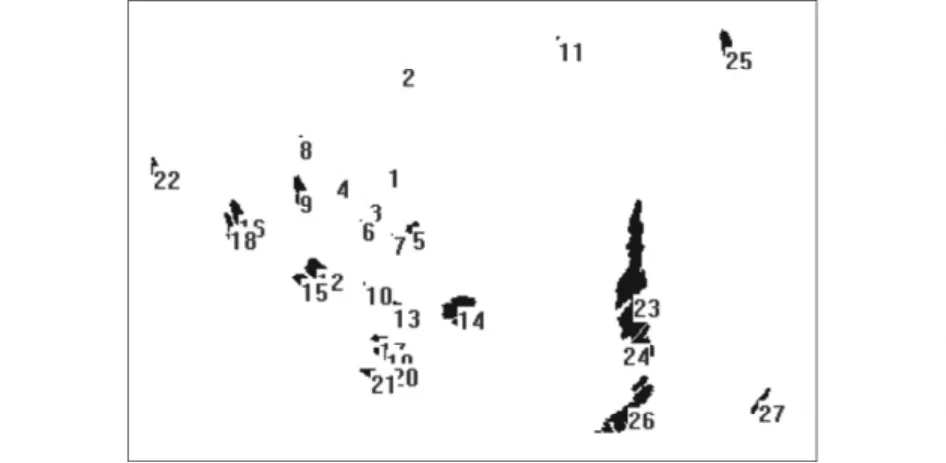
图5 标记后雷达图像Fig.5 Radar image after mark
以USV在雷达图像中的位置为坐标原点,艏向为Y轴正向,右舷为X轴正向建立直角坐标系,计算图像中每个目标的坐标和相对位置.目标的位置和距离是指目标在雷达图像中形状的质心相对于USV的位置和距离.
假设某个目标由n个像素组成,其中每个像素相对于USV在X轴上的像素距离为pxi,在Y轴上的像素距离为pyi(i=1,2,……,n),则此得到目标相对于USV的位置为
X轴方向:

Y轴方向:

目标相对USV的像素距离为

通过像素距离与实际距离的关系,当前图像量程为0.5 n mile,USV位置到距离圈为170个像素,即每个像素的实际距离为0.003 n mile.限于篇幅,给出图3中距离USV最近的5个目标位置信息,如表1所示.
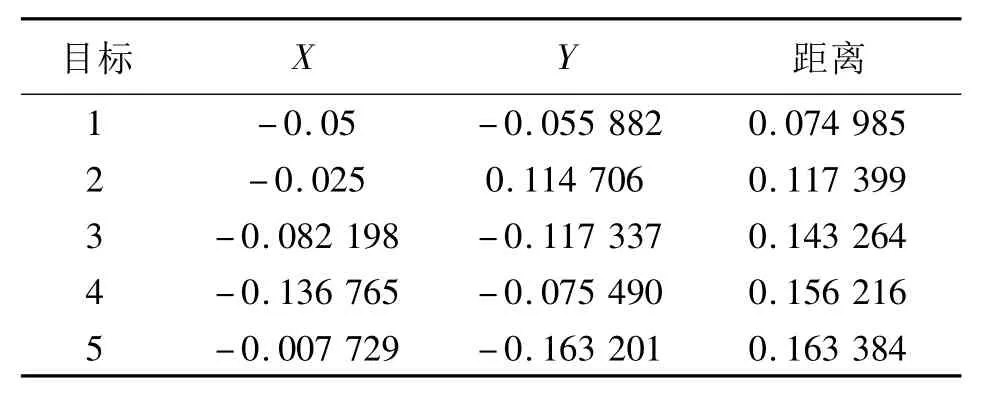
表1 雷达图像中目标的位置信息Table 1 The location of target in radar image n mile
2.3 雷达图像目标特征提取
在雷达系统中,不仅要能够检测出目标的位置信息,还要能提供出目标的运动参数信息(如航速、航向等).对于雷达图像,一般都含有数个甚至数十个、上百个目标,因此,如何在连续的雷达图像序列中对应出同一个目标是解决目标跟踪的重要问题.选择目标的位置、面积以及不变矩特征相结合的方式来匹配雷达图像序列中的同一目标.
在雷达图像序列中,由于每帧图像之间的时间间隔较短,如文中采用的雷达,约2.5 s扫描出一整幅图像,因此2帧图像之间的目标位置变化不会很大.在雷达图像中目标形状特征总会发生变化的情况下,用位置特征来匹配目标可以得到较理想的效果.
目标的面积特征是指每个目标所占的像素点个数.在雷达图像中,尽管目标的形状从一帧图像到下一帧图像会有所变化,目标的面积也会产生变化,但这样的变化是在一定范围之内,不会产生剧烈的变化,因此可将目标的面积特征作为匹配对象之一.
不变矩算法是一种通过提取具有平移、旋转和比例因子不变性的数学特征来解决几何失真问题的方法.Ming-Kuei Hu于1962年在中给出了连续函数矩的定义和关于矩的基本性质,证明了有关矩的平移不变性,旋转不变性以及比例不变性等性质,具体给出了具有平移、旋转和比例不变性的7个不变矩的定义[12].
Hu利用二阶和三阶中心矩构造了7个不变矩,具体定义[12]如下:

不变矩特征提取在不变矩的实际计算过程中,不同图像的不变矩数值分布范围非常大.为调整其取值范围,对7个不变矩取对数修正为 xi=|g|φi|,i=1,2,…,7.
3 基于卡尔曼滤波的目标跟踪
基于航海雷达图像的特征,在雷达图像序列中,有的目标会时隐时现,因此单纯用目标匹配的方法建立的目标链可能会因为在某一帧雷达图像中目标的丢失而使目标链断裂,造成对目标运动参数计算的错误.因此,利用卡尔曼滤波的预测功能,预测出目标未来的位置信息,用以弥补在某一帧中目标丢失而引起的目标链断裂的缺点,对目标跟踪具有很好的效果.另外,由于雷达图像中的目标形状会时常发生变化,所提取出的特征未必会较好的完成雷达目标的匹配工作,因此,根据卡尔曼滤波预测出下一帧的目标的位置来寻找目标在下一帧中的同一目标可以对目标匹配做很好的补充.
3.1 算法描述
卡尔曼滤波的离散时间系统的动态方程(状态方程)可表示为[13-14]

式中:F(k)为状态转移矩阵;X(k)为系统状态矢量;n(k)为系统动态噪声矢量,其协方差为Qk,n(k)可以被ΓkWk所代替,Γk为动态噪声矩阵,Wk为动态噪声.
卡尔曼滤波的离散时间系统的量测方程为

式中:z(k)为系统观测矢量,H(k)为观测系数矩阵,η(k)为系统观测噪声矢量.n(k)和η(k)都为均值为零的白噪声系列,且互不相关,均服从高斯分布.
卡尔曼滤波由以下公式组成:
1)状态向量预报方程为

2)状态向量协方差矩阵预报方程为

3)量测的预测协方差(或新息协方差)为

4)卡尔曼加权矩阵(或增益矩阵)为

5)状态向量更新方程为

其中:ν(k+1)新息或量测残差,即

6)状态向量协方差更新方程为


3.2 数学模型的建立
卡尔曼滤波器是一个对动态系统的状态序列进行线性最小误差估计的算法,一般用于线性系统.尽管雷达图像中的目标物体运动有时属于非线性系统,但由于图像采集时间间隔较短,可近似将单位时间内目标在图像中的运动看作匀速运动,采用卡尔曼滤波器可以实现目标运动参数的估.
用目标某一时刻在图像中的位置和速度来表示目标的运动状态.为了简化算法的计算复杂度,设计了2个卡尔曼滤波器分别描述目标在X轴和Y轴方向上位置和速度的变化.下面仅讨论X轴方向上卡尔曼滤波器的实现过程,Y轴方向上同理.在这里采用二阶运动模型,即匀速运动模型.
3.2.1 系统状态方程的建立
目标物体运动方程为

式中:xk、vk、αk分别为目标在t=k时刻X轴方向上的位置、速度和加速度,T为k帧图像和k+1帧图像之间的时间间隔.实际计算中,αkT可以当作白噪声处理.将式(14)写为矩阵形式为

通过对比式(15)与卡尔曼状态方程式(5),可知卡尔曼滤波器系统状态矢量为

状态转移矩阵为

系统动态噪声矢量为

3.2.2 系统观测方程的建立
由已经获取目标的位置信息,即

通过对比式(19)与卡尔曼观测方程式(6),可得卡尔曼滤波器系统观测矢量为

观测系数矩阵为

建立了上述系统状态方程和观测方程之后,就可以利用卡尔曼滤波方程式(7)~(13),通过递推方法,不断预测目标在下一帧中的位置.
3.3 初值的选取
根据二点法来选择初值.
1)滤波初始状态估值为

式中:x0'和x1'分别为0时刻和1时刻x坐标的测量值,T为信号周期.
2)状态估值初始协方差矩阵为

式中:δ2x为x方向的测量噪声方差.
3)系统动态噪声协方差矩阵Q0可取为

为抑制滤波器发散,采用的是限定增益法,即当增益下降到某一定值时,让它不再下降,保持现有的增益不变,以加强当前输入值的引导作用.
4 试验结果与分析
2010年5-7 月,某型USV在山东省蓬莱海区进行了雷达图像采集、操纵性和遥控运动控制试验.应用嵌入式雷达图像采集处理系统对真实海洋环境下的雷达图像进行了大量采集处理工作.下面对具体试验结果进行分析.图6为系泊状态下的试验载体某型USV,桅杆顶部为Raymarine E80数字雷达.

图6 系泊状态下的USVFig.6 The mooring state of USV
4.1 雷达图像目标检测结果
选取一组50帧的雷达图像序列,图像中主要运动目标为一艘滚装渡轮,该图像序列记录了渡轮进港过程.
图7中图像分别为序列中第1帧、第10帧、第20帧、第30帧、第40帧和第50帧图像,右上方亮斑即为进港渡轮,其余亮斑为港内泊船及码头建筑等障碍物.对进港渡轮的目标检测结果如下.

图7 雷达图像序列Fig.7 Radar image sequence
图8中位置变化以X方向为主,Y方向运动速度较小.X方向位置变化都在0.02 n milde之内(7个像素之内).在当前量程下(0.5 n milde),航速30 kn以下的运动目标在相邻2帧雷达图像中的位置变化应该在7个像素之内.由此可见用位置特征来匹配目标可以得到较理想的效果.
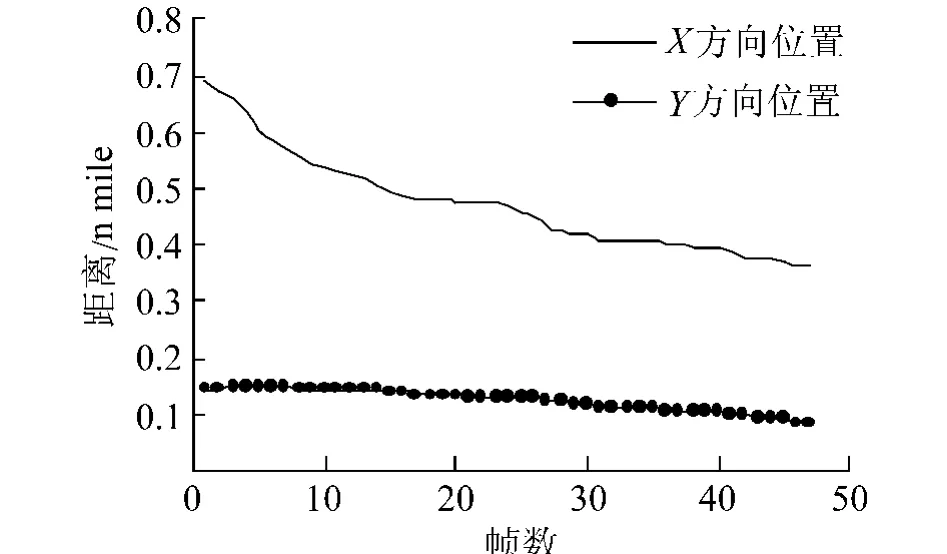
图8 位置变化曲线Fig.8 The change of location
图9中面积变化在前30帧约为60个像素.后期面积有所增大,主要原因为渡轮在30帧左右减速并转向进港,增大了雷达反射面积.由于外界环境干扰和雷达自身原因,目标的形状在相邻两帧图像会有所变化,随环境不同变化范围也会有所增减,但一般不会发生剧烈改变,因此可以把面积特征作为位置特征的补偿来进行目标匹配.
图10中不变矩变化曲线反应了目标7个不变矩的变化趋势,可以看出不变矩I1、I2变化较小,变化范围在0.7以内,可以较好的反映出目标的特征信息.I3~I7变化范围较大,但趋势较平稳,可以作为目标特征信息的参考.
在雷达图像目标检测试验中,采用的以位置特征匹配为主,面积特征和不变矩特征为参考的目标检测匹配技术可以较好的完成图像序列的匹配,达到对目标的跟踪效果.

图9 面积变化曲线Fig.9 The change of area

图10 不变矩变化曲线Fig.10 The change of moment invariants
4.2 卡尔曼滤波预测
针对图7中的图像序列进行卡尔曼滤波位置预测,结果如图11、12所示.

图11 目标位置预测值与实际值比较Fig.11 Comparison of values of predicted and actual target location
从图11的位置预测曲线和实际预测曲线比较可以看出卡尔曼滤波算法较好的预测了目标的位置信息,预测曲线与实际曲线趋势吻合,跟踪效果明显.图12的误差曲线反映预测误差在滤波初始阶段较大,第10帧图像后,预测值接近稳定,误差在0.01 n mile以内,在图像上显示为5个像素以内.
利用卡尔曼滤波完成对雷达图像中目标位置的预测,不仅可以弥补雷达图像序列中丢失目标的位置信息,防止造成目标链断裂,还可以根据预测的位置信息帮助寻找下一帧图像中的同一目标,以帮助解决由于雷达图像中目标形状多变带来的特征匹配不够可靠的问题.

图12 X、Y方向位置预测误差Fig.12 The predicted error of X and Y location
5 结束语
在海上试验中,设计的USV嵌入式雷达图像采集系统多次可靠的长时间运行,验证了系统在体系结构、图像处理算法以及系统硬件和软件方面的合理性.试验结果表明采用的图像处理、目标特征匹配和卡尔曼滤波目标跟踪算法可以在0.5 s内有效的完成对运动目标的检测和跟踪,实时提供目标的位置信息,满足USV图像采集处理系统的要求.
讨论的USV为高速滑行艇,因此复杂海洋环境下的雷达图像处理和目标跟踪方法有待进一步研究.基于雷达图像的特征,同一目标在雷达图像序列中的形状会不断变化.因此根据雷达图像特征,可以继续研究适合于雷达图像的特征匹配方法,使目标跟踪取得更好的效果.
[1]徐玉如,苏玉民,庞永杰.海洋空间智能无人运载器技术发展展望[J].中国舰船研究,2006,1(3):2-4.XU Yuru,SU Yumin,PANG Yongjie.Expectation of the development in the technology on ocean space intelligent unmanned vehicles[J].Chinese Journal of Ship Research,2006,1(3):2-4.
[2]MANLEY J E.Autonomous surface vessels,15 years of development[C]//Proc Oceans 2008 MTS/IEEE Quebec Conference and Exhibition.Quebec,2008:1-4.
[3]VEERS J,BERTRAM V.Development of the ASV multimission surface vehicle III[C]//Proc of 5th Int Conf Computer and IT Application in the Maritime Industries.[s.l.],2006:345-355.
[4]CACCIA M,BIBULI M,BONO R,et al.Basic navigation,guidance and control of an unmanned surface vehicle[J].Autonomous Robots,2008,25:349-365.
[5]XU T,CHUDEY J,SUTTON R.Soft computing design of a multisensory data fusion system for unmanned surface vehicle navigation[C]//Proceedings of 7th IFAC Conference Maneuvering Control Craft.[s.l.],2006:124-156.
[6]SHI C,XU K,PENG J,et al.Architecture of vision enhancement system for maritime search and rescue[C]//8th International Conference on ITS Telecommunications.Shanghai,2008:12-17.
[7]ALMEIDA C,FRANCO T.Radar based collision detection developments on USV ROAZ II[C]//OCEANS 2009-EUROPE.Bremen,2009:1-6,11-14.
[8]OLEYNIKOVA E,LEE N B,BARRY A J,et al.Perimeter patrol on autonomous surface vehicles using marine radar[C]//OCEANS 2010 IEEE-Sydney,Sydney.2010:1-5.
[9]刘兴洪,汪林林.一种图像边缘保持的改进方向平滑算法[J].计算机科学,2006,33(10):2l-23.LIU Xinghong,WANG Linlin.An improved image's edge preserving orientation smoothing algorithm[J].Computer Science,2006,33(10):21-23.
[10]KITTLER J,ILLINGWORTH J.On threshold selection using clustering criteria[J].IEEE Trans Syst Man Cyber,1985,15:652-655.
[11]SUZUK K,HORIBA I,SUGIE N.Linear-time connectedcomponent labeling based on sequential local operations[J].Computer Vision and Image Understanding,2000,(89):1-23.
[12]HU Mingkuei.Visual patten recognition by moment invariants[J].IEEE Transactions on Information Theory,1962:179-187.
[13]杨春玲,刘国岁,倪晋麟.基于转换坐标卡尔曼滤波算法的雷达目标跟踪[J].现代雷达,1998,5:36-38.YANG Chunling,LIU Guosui,NI Jinlin.Converted measurement Kalman filtering algorithm for radar target tracking[J].Mondern Radar,1998,5:36-38.
[14]CHU Hongxia,WANG Kejun.Target tracking based on mean shift and improved Kalman filtering algorithm[C]//Proceedings of the IEEE International Conference on Automation and Logistics.Shenyang,2009:808-812.
