电力巡线无人直升机障碍规避系统
2012-06-17郑天茹王滨海张晶晶
郑天茹 ,王滨海 ,3,刘 俍 ,王 骞 ,张晶晶
(1.山东电力研究院,山东 济南 250002;2.国家电网公司电力机器人技术实验室,山东 济南 250002;3.山东鲁能智能技术有限公司, 山东 济南 250002)
0 引言
近年来,我国国民经济的持续快速发展对电力工业提出越来越高的要求。我国目前已形成华北、东北、华东、华中、西北和南方电网共6个跨省区电网,截至2010年110(66)kV及以上输电线路已超过70万km。500 kV线路已成为各大电力系统的骨架和跨省、跨地区的联络线,电网发展滞后的矛盾得到缓解。由于我国国土辽阔,地形复杂,平原少、丘陵及山区较多,气象条件复杂,瓷绝缘子质量不够稳定等,为了安全和可靠地供电,巡线维护自动化和现代化已日益显示出其迫切性[1-3]。
采用无人机空中作业进行电力巡线,能够克服利用有人驾驶的直升机进行巡线的维护费用昂贵、安全问题突出等弊端[4],但无人机巡线过程中,难免会遇到交跨线、树木、建筑物等障碍物,无人机巡线系统虽然具有3D程控飞行的技术,但是仍然欠缺应对预期外障碍物的紧急避让机制;无人机是通过GPS方式进行导航的,由于GPS存在误差,所以无人机在执行任务的过程中可能会出现偏离预定航向的情况,造成无人机与输电线路或其他障碍物的发生碰撞[5];在经过交跨线时,如果无人机的飞行高度不够,同样存在与线路发生碰撞的危险。因此,为了保障无人机巡线系统及输电线路的安全,提升巡线作业的可靠性,有必要开发一套无人机避障系统,实现无人机巡线系统的自主避障功能。
1 测距方式的分类和选择
超声波测距、红外测距、激光测距、微波雷达测距和毫米波雷达测距是目前比较常用的测距方式,通过对其测距原理的了解,红外测距的范围有限,而激光测距抗干扰能力较弱,超声波方式虽然实现简单、抗干扰能力较强,但是具有一次测量距离较短的缺陷,均不适用于无人机避障系统[6-8]。微波雷达和毫米波雷达方式除具备超声波方式抗干扰能力强、指向性强等特点外,还可以进行远距离的精确测距,其测量距离可达数百米,测量精度可达到厘米级,但毫米波雷达相对于微波雷达容易小型化,因此毫米波雷达更加适用于开发无人机自主避障系统。此外,根据电力巡线无人机巡查目标——输电线路的特殊性,设计了根据电磁场强度的探测来判断与输电线路距离这一具有针对性、独特性、创造性的测距方法。此方法的特性是:距离输电线路越近,测距精度越高,可达厘米甚至毫米级别,尤其适用于电力巡线无人机在对输电线路巡查时对输电线路的规避。
毫米波(Millimeter Wave)的工作频率介于微波和光之间,波长为1~10 mm,因此兼有两者的优点。它具有极宽的带宽:26.5~300 GHz,带宽高达273.5 GHz,超过从直流到微波全部带宽的10倍;波束窄,因此可以分辨相距更近的小目标或者更为清晰地观察目标的细节;传播受气候的影响要小得多,可以认为具有全天候特性;易小型化。因此利用毫米波雷达测距可满足无人机自主避障系统的要求。高精度电磁场检测传感器/系统可根据各种磁传感器的工作范围和使用条件不同,选择几种进行组合使用,以达到输电线路周围磁场检测精度和稳定性的要求,以及无人机对于所搭载设备的重量、抗震、抗干扰等多方面的要求。
2 电力巡线无人直升机超低空飞行障碍规避系统设计
无人机避障系统由机载的信号采集模块和机载飞控的紧急避障模块组成。机载的高精度电磁场检测传感器、高性能测距传感器与飞控紧急避让模块可实现主动避让方式;视觉传感器与后台的分析识别模块可实现辅助判断避让方式。测距传感器和电磁场检测传感器均与信号预处理模块连接,视觉传感器与视觉信号处理模块连接,信号预处理模块和视觉信号处理模块通过通讯端口与紧急避障模块连接,紧急避障模块与无人机动力装置连接。系统框架如图1所示。
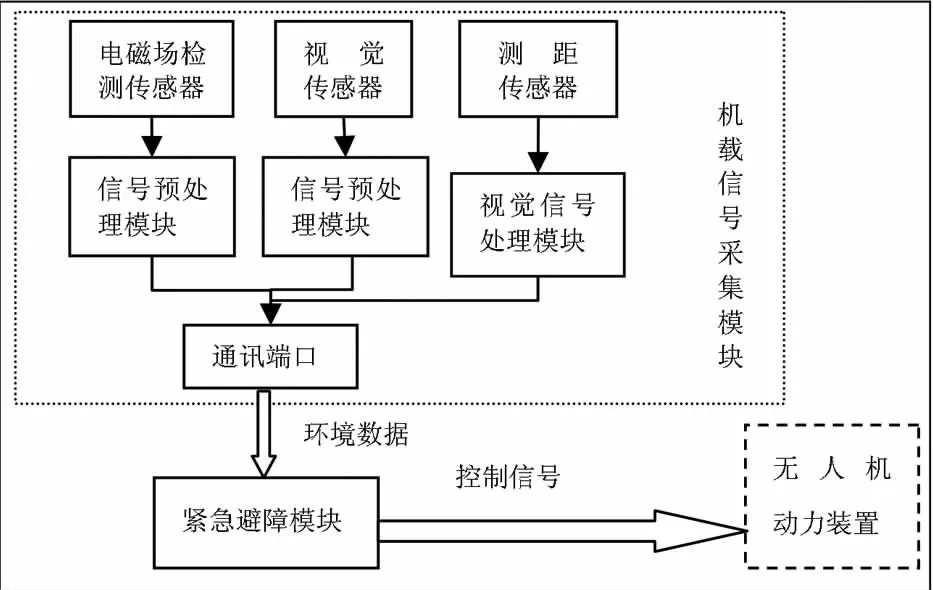
图1 避障系统框架图
2.1 毫米波雷达测距
2.1.1 测距传感器
测距传感器信号先经过预处理模块,将模拟信号转换为数字信号,并将周围的环境信息封装为通讯报文或其他形式,经通讯端口,将数据提供给飞控的紧急避障模块。飞控的紧急避障模块负责对环境信息进行分析计算,并判断是否要进行避障行为,同时计算出合理的避让路线,随后将控制信号发送给无人机的动力系统,实现避让动作。以德国Innosent公司的IVS-148微波雷达测距传感器(图2)为例,介绍其基本参数,如表1所示。
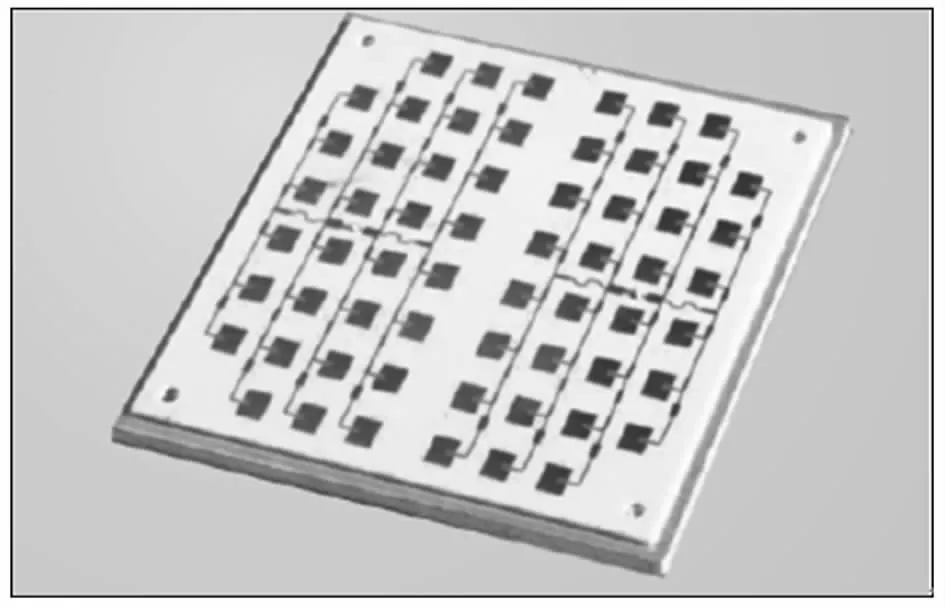
图2 IVS-148微波雷达测距传感器
2.1.2 毫米波雷达测距
毫米波雷达测距的原理是:雷达系统通过天线向外发射一列连续调频毫米波,并接收目标的反射信号。发射波的频率随时间按调制电压的规律变化。一般调制信号为三角波信号。反射波与发射波的形状相同,只是在时间上有一个延迟,发射信号与反射信号在某一时刻的频率差即为混频输出的中频信号频率,且目标距离与前端输出的中频频率成正比。如果反射信号来自一个相对运动的目标,则反射信号中包括一个由目标的相对运动所引起的多谱勒频移。根据多谱勒原理就可以计算出目标距离和目标相对运动速度。
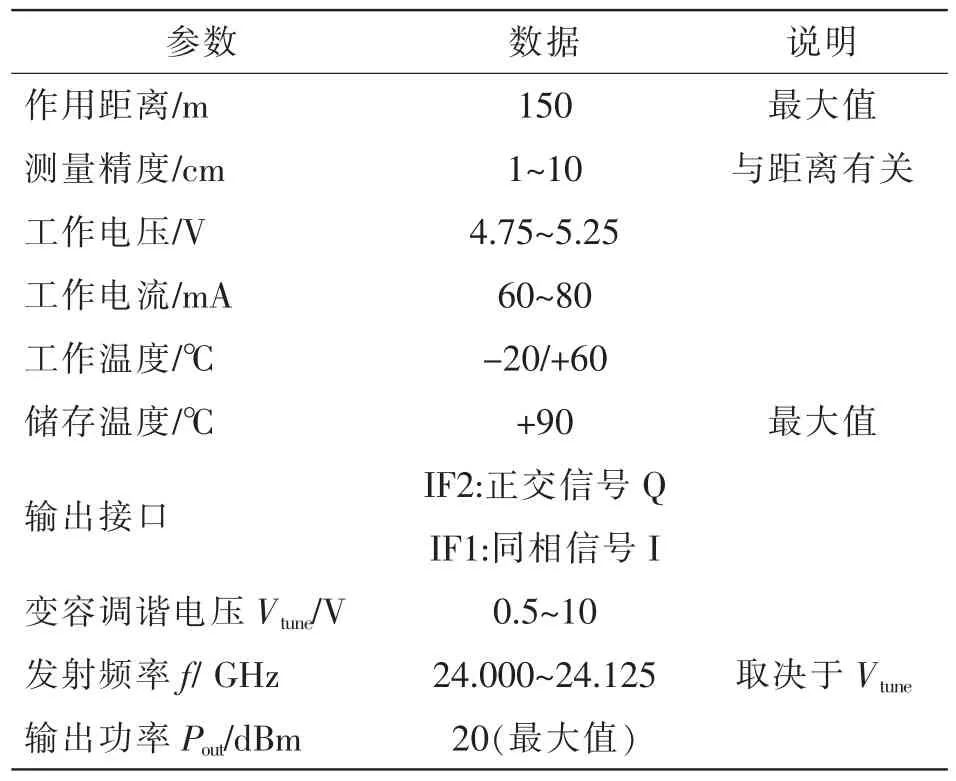
表1 IVS-148微波雷达测距传感器基本参数
2.1.3 信号处理
由于无人机检测输电线路时飞行高度较低,在应用毫米波雷达进行对导线、地线等尺寸较小物体的距离检测时,大地存在形成的反射波造成的干扰是巨大的,因此需要对信号进行噪声抑制处理。将测距传感器检测、输出的模拟信号通过A/D转换装置转化为数字信号,并应用信号处理技术,抑制强大的干扰信号,同时将有用的检测信号放大,以排除干扰信号,提高毫米波雷达检测结果精确度。
2.2 电磁场测距
2.2.1 电磁场检测传感器
输电导线周围的电磁场根据麦克斯韦电磁场理论,会在周围产生一定强度的电磁场。我国的输电频率为50 Hz,产生的电磁波属于极低频(工频)电磁波,波长超过6 000 km。输电导线周围的电场和磁场按照一定规律分布。通过机载电磁场检测传感器的探头检测无人机所处电磁场的强度和方向可以反过来获得无人机距离输电导线的距离,能够判断无人机是否存在安全隐患,这正是进行电磁测距的目的。由于无人机在进行输电线路巡检时与线路需要保持一定的安全距离,在此距离上电磁场强度已大大减弱,且无人机尺寸远远小于工频电磁波的波长,电磁场辐射能量很小,能够检测到电磁波的能量非常小,因此在使用电磁测距时,需要使用高精度传感器。
以霍尔传感器(图3)为例,介绍其基本参数。

图3 霍尔传感器
霍尔器件具有许多优点,他结构牢固、体积小、重量轻、寿命长、安装方便、功耗小、频率高、耐震动,不怕灰尘、油污、水汽及盐雾等的污染或腐蚀,基本参数如表2所示。
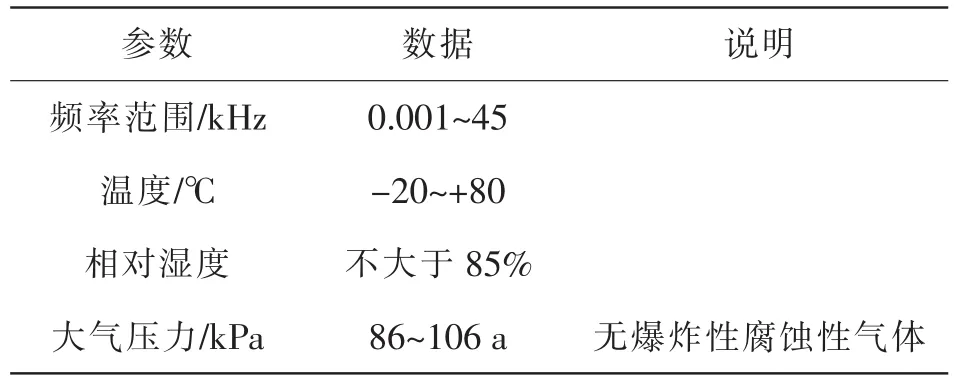
表2 霍尔传感器基本参数
2.2.2 电磁场测距
将不同电压等级的输电导线周围电磁场的变化做仿真计算,其计算分析可精确到与输电导线距离变化厘米级时对应电磁场的变化情况,由此可获取导线周围一定距离范围内的电磁场数值分布。进而,将电磁场测量设备检测到的电磁场强度与仿真结果对比,可推测得到无人机与输电线路间的距离,将此信号传递给飞控系统。当检测到与输电导线距离小于某定值时,飞控系统可强制无人机飞行平台改变飞行方向,以避免无人机与输电导线的碰撞,避免事故发生。
2.3 视觉测距
2.3.1 视觉传感器
视觉传感器是由安装在无人机机身上的多个摄像头构成的,各个摄像头可分别成像,并将视频信号发送给视觉处理模块。
2.3.2 视觉处理模块
视觉处理模块的原理就是利用多个摄像头从各视点获取目标点在不同视角下形成的图像坐标信号,利用成像几何模型计算同名像点图像坐标偏差,来获取目标点的三维坐标,再利用信息融合技术,可计算出图像中的物体距机体的距离,从而实现距离测量,为无人机避障系统提供判断依据。
3 系统效果
能够测量一定的距离范围且具有较高的测距精度,在30~100 m的范围内能感知厘米级别的障碍物或设备,电磁场测量仪器能够测量0~10-2T范围内的磁场强度。
具有较小的体积和重量。由于无人机的载荷有限,必须选择重量轻、体积小的产品。
具有较低的功耗。
具有较高的可靠性。由于是在特殊的条件下工作,又是整个无人机避障系统的重要组成部分,因此需要具备高可靠性的特点,抗振性强。
具有较高实时性。通过对环境数据的分析,极短时间内可决定是否发动避障动作,并能够进行路径规划。
4 后续研究工作
避障系统作为无人机巡检系统的重要保障机制,必须经过科学、全面且长期的测试工作,检验其性能和可靠性。
1)抗振测试。利用设备获取无人机机体的振动频谱,并用专业的振动台进行模拟,将信号采集模块安装在振动台上,检验其工作是否正常,并进行长时间的抗振测试,检查信号采集模块是否能够保持正常状态。
2)静态模拟测试。利用实验室、输电线路培训场地等条件,静态模拟巡检过程中遇到的障碍物等情况,检验信号采集模块是否能够感知到导线、树木等,并检验其测量距离和测量精度。
3)动态模拟测试。将信号采集模块安装在汽车等动态移动的物体上,对指定的导线、树木等障碍物进行测距,检验其是否能在动态条件下感知障碍物。飞控紧急避障模块是否能够正常分析环境数据并做出避障响应。
4)长时间联调测试。将无人机避障子系统安装在无人机巡检系统上进行长时间联调测试,检验其功率消耗、抗振性、测量距离、测量精度和电磁兼容性等性能是否能够长时间符合无人机工作要求。