GNSS在空中交通管制应用的关键性问题
2012-06-16胡莹
胡 莹
(中国民航航空温州空管站 浙江 温州 325000)
1 GNSS的组成
具有全球导航定位能力的卫星定位导航系统称为全球卫星导航系统,英文全称为Global Navigation Satellite System,简称为GNSS。它包含了美国的GPS、俄罗斯的GLONASS、中国的Compass(北斗)、欧盟的Galileo系统,可用的卫星数目达到100颗以上。
ICAO于1983年底成立FANS专门委员会,FANS由通信 (C)、导航(N)、监视(S)和空中交通管理(ATM)4部分组成。通信、导航和监视系统是基础设施。空中交通管理是管理体制、配套设施及其应用软件的组合。卫星技术,从陆基通信、导航、监视系统逐步向星基通信、导航、监视系统过渡,早期阶段先用星基系统作为陆基系统的补充,后期除少数陆基设备作星基系统的备用外,大部分陆基设备将被淘汰撤离,逐步以星基系统为主。数据链的开发利用以实现空—地、地—地可靠的数据交换,并进一步实现空—空数据交换,系统的数字化、计算机化及网络化。
2 导航系统的四个指标
2.1 精度
系统误差指总系统误差(TSE)。它是导航系统误差和飞行技术误差的综合,前者包含机载设备误差及地面设备误差:FTE包含人工驾驶时的飞行员判读和操纵误差或自动飞行控制系统的全回路误差。
2.2 完善性
它与总系统所提供信息正确性或置信度有关。完善性指系统在工作过程中不能工作时向用户提供及时警告的能力。
2.3 连续性
在需要的工作期间系统完成仟务而不间断的能力。全系统的连续性包括地面设备(外部设备)、空中信号和机载设备总体上的不中断连续合格服务,任何的短时间断将使飞机暴露在事故中。
2.4 可用性
总系统在希望的工作过程初始点上所具有完成任务的能力。
3 RNP的概念及指标要求
3.1 RNP 概念
利用不同导航性能要求去定义不同等级的RNP类型,制定空域规划时划分空域和航路的类型。导航性能包括各性能参数,即精度、可靠性、完善性、可用性、覆盖范围、定位速率、定位维数、容量、模糊度、恢复导航时间等。对应于某个等级的空域和航路类型的各性能参数都有要求,择其主要的具有代表性的参数“精度”去划分类型,它由导航传感器误差、机载接收机误差、显示误差和飞行技术误差(FTE)组合,这种组合也称为“导航性能精度”在某一个空域或一条航路上,要求其每架飞机的导航系统使用精度在总飞行小时的至少95%时间内出现飞机偏离希望航迹的距离不得超过某一数值。这个统计特性上的精度值被定义为“包容距离”。导航性能精度——基于导航传感器误差、机载接收机误差、显示误差和飞行技术误差组合的总导航精度,也称为系统使用精度。RNP—在一个定义空域中运行所需导航性能的一种表述。RNP-X:在占总飞行时间的至少95%的飞行时间内,发现飞机偏离预期位置的最大距离。机载告警系统——在要求的时间内给出报警。
3.2 RNP的四个指标:精度、完好性、连续性、有效性
3.2.1 RNP 精度
期望的航线:飞行机组人员和空中交通管制(ATC)期望飞机飞行的航线,给定一个特殊的航段或航线。
实际位置:位置定位功能输出的位置。
航线操作误差(PSE):定位的位置到定义的航线的距离。PSE包括飞行技术误差(FTE)和显示误差。
飞行技术误差(FTE):飞机当前位置与期望的预期位置之间的距离。
航线定义误差(PDE):定义的航线与期望的航线之间的垂直距离。
导航系统误差(NSE):真实位置与定位位置之间的距离。
总系统误差(TSE):真实位置与期望位置之间的距离。这个误差等于飞行技术误差(FTE),航线定义误差(PDE)和导航系统误差(NSE)三者的矢量和。
3.2.2 RNP 精度误差来源
导航台或GPS卫星星座引起的位置误差
机载导航传感器引起的位置误差
导航系统(FMC)引起的位置误差
航路定义误差(导航数据库中编码的航路与发布的航路之间的偏差)
飞行技术误差
3.2.3 RNP 完好性
完好性指的是在飞机性能的总系统误差大于侧向容限 (两倍的RNP值,可以提供足够的航路间隔和越障)且没有给出警报的情况的最大允许概率,要求其不超过10-5。即P(E2)=P(TSE>容限且没有警报)(垂直99.7%)。完好性用两个参数来定义:容限半径,容限等级。
RNP完好性考虑下列误差因素:
导航台或GPS卫星星座引起的位置误差
机载导航传感器引起的位置误差
导航系统(FMC)引起的位置误差
航路定义误差
飞行技术误差
3.2.4 RNP 连续性
飞机在运行期间,在没有非例行中断的情况下,其飞机总系统性能要满足完好性的要求。连续性指的是允许中断的最大概率,这个概率不能超过10-4。非例行中断指的是:
(1)导航性能全部中断。
(2)在失去RNP RNAV性能时,系统没有对其做出应有的警报(漏警)。
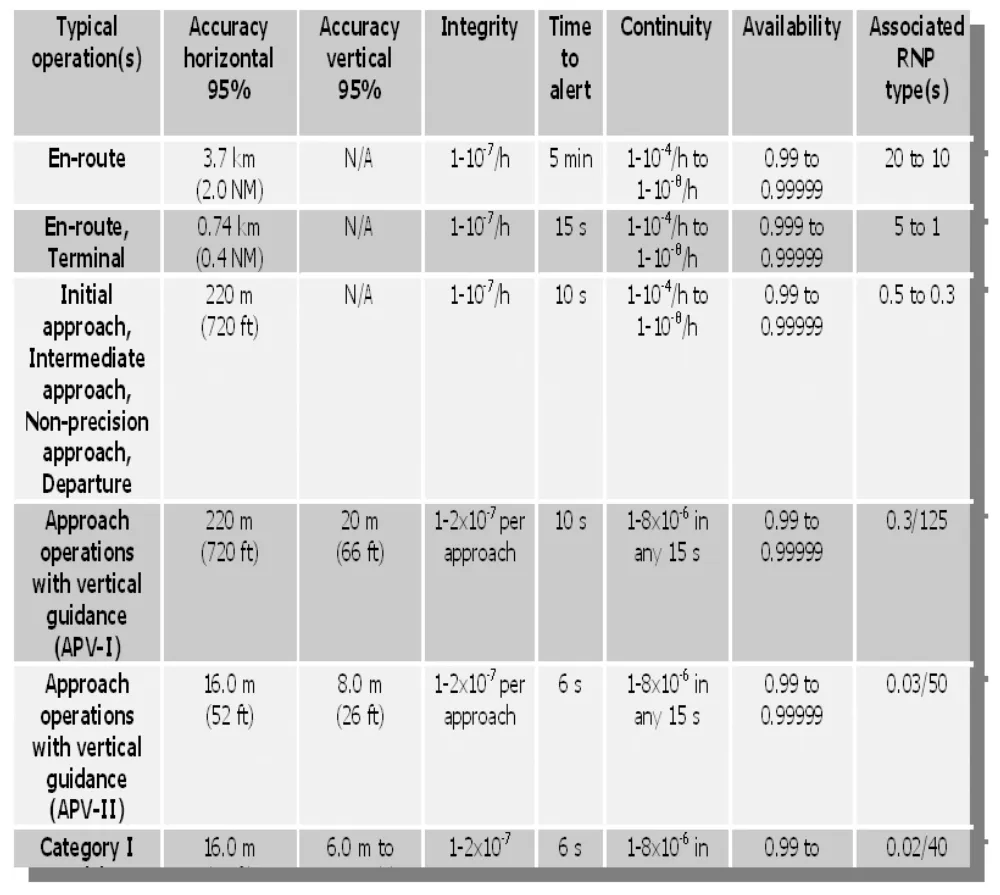
表1
(3)在系统正常工作时,对失去RNP RNAV性能的错误警报(误警)。
即P(E3)=P(系统失去RNP RNAV性能的情况下发生警报)+P(系统正常工作拥有RNP RNAV性能的情况下发生的错误警报)。
3.2.5 RNP 有效性
导航信号有效性包括GPS和无线电导航
导航设备有效性包括导航传感器和冗余
表1为ICAO对不同导航路径不同RNP类型的四个指标要求。
4 改进导航指标的几种方法
4.1 几种GNSS改进方法
SBAS(SPACE-BASED AUGMENTATION SYSTEM星基改进系统):欧洲 EGNOS,美国 WAAS,日本 MSAS,印度 IGNOS,中国 SNIA,加拿大C-WAAS;
GBAS(GROUND-BASED AUGMENTATION SYSTEM地基改进系统):差分系统(差分GPS基站,差分GPS接收机),网络RTK(REALTIME KINEMATIC实时动态定位),LAAS,伪卫星系统;
机载改进系统:RAIM(RECEIVER AUTONOMOUS INTEGRITY MONITORING接收机自主完备性监测),AAIM。
4.2 GABS
测量GNSS卫星信号(接受所有可见性信号);确定每颗卫星的伪距修正值(滤波,修正值计算);监视GNSS的完好性(确保测量及修正的完好性,不满足完好性条件时发出警告);VHF进行信息广播。
4.3 GBAS在民航的应用
1)FAA:Honeywell CAT I LAAS于2009年 9月认证;2010年完成CAT III LAAS地面和机载系统原型。
2)EUROCONTROL:在数个机场部署GABS测试系统,开展GBAS平行进近研究;支持GBAS CAT II/III研究和标准化。
3)ASA:2006年在悉尼安装Honeywell SLS-3000(已升级为SLS-4000);计划在 Melbourne安装 CAT III GBAS。
4)中国民航:系统验证

4.4 RAIM
1)RAIM的主要方法
伪距比较完整性方法:假设可见6颗卫星⇒6等式 4未知数;解前4个方程,结果用来估计后2个测量;估计值与实测值比较,差值作为伪距比较矢量的组成部分。最小二乘法,奇偶校验法。
2)RAIM 系统组成
地基完好性监视网络
监测站:7个
主控站:1个,北京
完好性发布系统
通过民航专用网络发布到管制中心和航空公司
通过ACARS电文向飞行员进行告警
通过甚高频数据链发送给机载多模式接收机
5 结束语
通过GPS卫星、北斗导航系统以及格洛那斯系统的研究,发现在民航的卫星导航系统的发展中还需要提高精度,完好性,连续性,有效性等指标的提升,虽然卫星系统本身能提供一定的指标,但为了保障飞行安全还需要进一步提高定位精度和完好性等性能,民航通过完好性监测网以及机载差分GPS接收机的使用和部分GBAS基站的建设,正在逐步向星基导航系统发展,为了更好为民航服务,研究和发展GNSS也是我国的当务之急,北斗系统随着第八颗卫星的上天,正逐步显现出在国内卫星导航系统的应用的重要性。