基于改进聚类算法的传感器非线性数据拟合研究*
2012-06-12宋念龙张新雨
宋念龙,张新雨,徐 璐
(西安理工大学自动化与信息工程学院,西安710048)
传感器是一种检测装置,它能够感受被测量的信息,并将检测感受到的信息按一定规律变换成电信号的形式输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。传感器的静态特性是指对静态的输入信号,传感器的输出量与输入量之间所具有的相互关系。通常情况下,例如,电涡流位移传感器、红外测温传感器、二极管测温传感器、光电测距传感器等,传感器的实际静态特性具有较强的非线性问题。其主要的特性均是与物理量之间的较强的非线性和单调关系。为了使仪表具有均匀的刻度读数,需要对传感器进行细致、多次的标定,但对于有些物理量测量的传感器例如温度传感器而言生产标定存在一定的不便性,因此需要对静态特性曲线进行分析找出能够代表特性的关键特征点,在生产过程中只需要对特征点进行校准即可达到所需的精度要求。将得到的特征点数据存储在单片机中,经过单片机的处理,利用线性插值可以估计出被检测物理量。以最少的信息量建立电参数和物理量的对应关系,从而减少对单片机内存的占用和降低校正的工作量[1-3]。
基于如何找出曲线的关键点(聚类中心点),本文对差动式结构的双线圈脉冲电涡流传感器的输出电压与位移之间存在非线性问题,提出了一种改进的模糊C-均值曲线拟合算法,通过输出电压来估计位移量。该方法利用改进的粒子群优化算法对聚类中心点初始化,其中在改进的粒子群优化算法中主要采用Logistic混沌映射式产生混沌初始粒子建立种群,解决了以往模糊C-均值算法容易陷入局部最优的问题。该方法算法简单、精度高、可靠性好、应用方便,有效的减少了单片机内存的占用空间,并提高了电涡流位移传感器的测量精度[4]。
1 电压与位移对应关系模型的建立
由于电涡流传感器本身的特性,电涡流传感器输出的是一组电压信号,而电压信号与实际位移量存在非线性关系。为了减少对传感器的标定次数及单片机内存的占用量,需要对电压信号及位移量进行曲线拟合,智能传感器便可以通过电压信号来估计位移量[5-8]。
本文通过改进模糊C-均值聚类算法寻找中心点,这些中心点作为智能传感器的标定点,再经过线性化计算将电压信号转换为位移量。聚类算法是将数据按照一定的关系分配到不同的簇中的分类方法,在同一簇中的数据具有极高的相似性,而在不同簇中数据具有极高的相异性。每一个簇中都有一个中心点,这个点相对于这个簇中的其他数据点具有极高的信息量,因此可以用这个中心点所拥有的信息代替这个簇中的其他点所拥有的信息,从而减少数据量[9]。与以往的等间距线性拟合算法相比,改进模糊C-均值聚类算法重视每个样本点所携带信息的重要性,根据实际情况有效的分配中心点的位置,用最少的中心点来描述曲线特征,对不同的传感器具有更强的自适应性。
1.1 利用粒子群优化算法对聚类中心点初始化
在采用模糊C-均值聚类算法找中心点时,需要对聚类中心点进行初始化,当初始化不合理时,聚类中心点的最优解很可能成为局部最优解,因此算法中对聚类中心点的初始化是至关重要的。常用的初始化方法是采用减法聚类算法,聚类中心点的数目由算法的参数决定,当给定参数达到一定值时,初始中心点的数目将会饱和,很难有明显的变化,因此该算法对初始聚类中心点的数目有一定的约束性,并且不能直观地确定初始聚类中心点的数目[10]。
本文提出了一种用改进的粒子群优化算法对模糊C-均值算法中的聚类中心点进行初始化的方法。该算法中聚类中心点的数目即为粒子群优化算法中种群的维数,而种群的维数可以为任意值,因此有效地解决了传统初始化算法中对中心点数目的约束问题,并且该算法将传统的粒子群优化算法与混沌搜索法相结合,利用混沌的遍历性、随机性和对初始条件的极度敏感性[11-12],能够按其自身规律不重复的遍历所有可能的聚类中心初始点,从而有效地避免了陷入局部最优问题[13]。
设在一个N维的搜索空间中,由m个粒子组成的种群 X={x1,x2,…,xm},其中第 i个粒子的位置为 xi={xi1,xi2,…,xiN},表示所求问题的可能解,其对应的速度 vi={vi1,vi2,…,viN}。该算法根据式(1)、式(2)更新各个粒子的速度与位置。

其中,γ1和 γ2是(0,1)之间的随机数,c1和 c2是学习因子,present表示当前的粒子位置,PBest={pBest1,pBest2,…,pBestm}表示各个粒子目前为止搜索到的最优位置,gBest表示种群目前为止搜索到的最优位置,ω为惯性权重,本文采用线性递减权值[14],如式(3)所示:

其中,ωmax为初始惯性权值,ωmin为终止惯性权值,k为当前的迭代数,T为总的迭代数。
具体实现步骤如下:
(1)选择适当的参数,设定聚类中心点的数目N和种群的粒子数m,随机产生N个[0,1]上的随机数作为第一个粒子x1。根据Logistic混沌映射式产生混沌初始粒子建立种群[15],如式(4)所示:

(2)将所有粒子按式(5)映射到变量的取值范围[α,β]内。

(3)对各个粒子的速度进行初始化,计算各个粒子所对应的适应度函数值fi,其中适应度函数为所要优化的目标函数。并对PBest和gBest进行初始化,其对应的适应度函数值分别为Pf={pf1,pf2,…,pfm}和 gf。
(4)根据式(1)、式((2)更新粒子的位置和速度,计算对应的适应度函数值fi。根据pfi和fi的大小对pBesti和pfi进行更新,同时更新gBest和gf。
(5)当满足最大迭代次数时,得到的gBest为最优的聚类中心初始点。
1.2 改进的模糊C-均值算法
模糊C-均值算法通过引入隶属度矩阵来描述各个样本点对各个簇的隶属程度,进而得到目标函数式(6)的最小值,通过不断的更新聚类中心矩阵和隶属度函数矩阵而获得目标函数的最小点,目前该算法的收敛性已得到证明[16]。

设样本为X={x1,x2,…,xn},将样本分为C 类,C个聚类的聚类中心为 V={v1,v2,…,vC},利用改进的粒子群优化算法对聚类中心进行初始化,其迭代次数L=0,dij=‖xi-xj‖表示样本空间第j个元素与第i个元素之间的欧几里得距离,由于每个元素对分类结果的影响不同,因此给每一个元素赋予一个权值wi,这个权值反应了该元素对分类结果的贡献程度,其表达式为式(7)所示:

在模糊C-均值算法中,隶属度矩阵U(c×n)(L)为重要的运算变量,当dij=0时,则表示样本空间第j个元素对第i个元素的隶属度uij=1,否则其隶属度为式(8)所示
其中,m为模糊指数,m∈(1,∞),一般情况下取m=2。
当得到初步的隶属度矩阵后,需要对隶属度矩阵U(c×n)(L)进行修正,使每一个元素对聚类中心点的隶属程度更加明确。设第i个元素的最大隶属度为uai,其第二大隶属度为ubi,则进行修正后最大隶属度变为式(9)

其第二大隶属度变为式(10)所示

其中,α 为吸引力抑制因子,α∈[0,1]。
用得到的隶属度矩阵U(c×n)(L)重新计算聚类中心点,如式(11)所示,实现对聚类中心点的更准确计算。随后进行不断的迭代,当满足终止条件式(12)时,停止对聚类中心点的迭代过程,并得到最终结果。
具体实现步骤如下:
步骤1 选择适当的参数,根据改进的粒子群优化算法对聚类中心点矩阵V={v1,v2,…,vc}进行初始化。
步骤2 根据式(8)、式(9)、式(10)得到隶属度矩阵 U(c×n)(L),此时 L=0,并根据式(6)得到最小目标函数值。
步骤3 根据式(11)更新聚类中心点矩阵V,并且使L=L+1。
步骤4 由更新后的聚类中心点计算当前的隶属度矩阵U(c×n)(L)和最小目标函数值。
步骤5 根据式(12)判断迭代是否继续。
步骤6 当满足步骤5条件时,终止对聚类中心点矩阵的更新,否则回到步骤3,继续迭代。
2 方法实现及实验结果分析
本文采用在线查表,离线计算的方法进行试验。首先对实验数据进行采集,得到一组完备的数据集,然后对实验数据进行预处理。通过模糊C-均值算法建立输出电压与位移量的拟合模型,最后在智能传感器中利用线性插值法得到与实际输出电压对应的理论位移量。将本文方法应用于电站锅炉空气预热器密封间隙控制系统中,此时位移量表示预热器的密封间隙距离,其仿真及实验结果如下:
(1)用等间距线性拟合算法得到拟合曲线,当中心点数目分别为N=5、15、25时对实验数据进行估计,其对应的位移误差如表1所示。
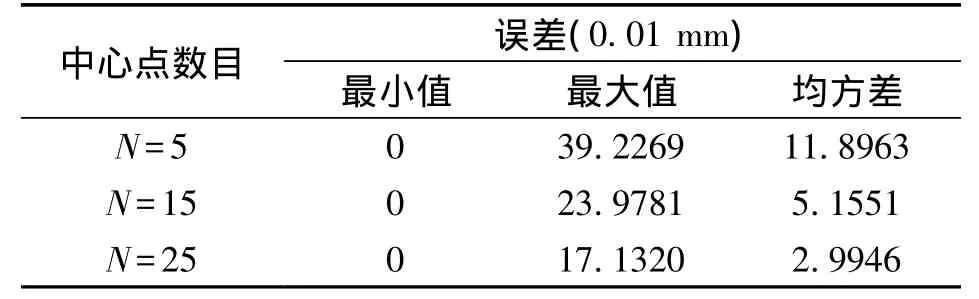
表1 等间距线性拟合算法得到的误差值 0.01 mm
由表1可以看出,误差量随中心点数目的增加而减小。
(2)利用聚类算法得到拟合曲线,首先确定聚类中心点的数目N,并对其进行初始化。传统的初始化方法采用减法聚类算法,根据迭代过程中对终止条件参数δ的设置,间接的确定中心点的数目N,表2为终止条件参数δ与中心点数目N的对应关系。
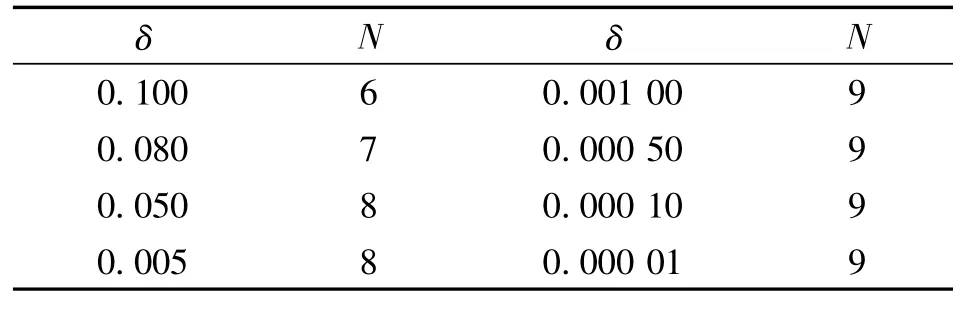
表2 参数δ与N的对应关系
由表2可知,当终止条件参数δ足够小时,聚类中心的数目N将达到饱和,不再因δ的变化而变化,因此这种方法对中心点数目的确定存在一定的约束性。而改进的粒子群算法对中心点的确定则是任意的。
(3)改进粒子群算法与减法聚类算法对中心点初始化结果相比较
减法聚类算法对中心点进行初始化时,中心点的数目很可能会达到饱和状态,此时对中心点的初始化将很可能失去它的有效性,因此减法聚类算法只能对一定数目的中心点进行初始化。针对位移传感器的输出电压与位移量的对应关系,利用减法聚类算法得到的中心点的数目取值将在9左右浮动。取N=9时分别用减法聚类算法和改进粒子群算法对中心点进行初始化得到拟合曲线,并对实验数据进行估计,得到的误差结果如表3所示。
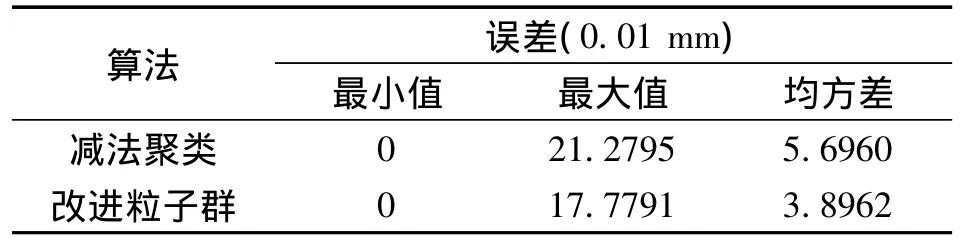
表3 两种初始化方法的误差对比结果
由此可知,当中心点数目要求不大于9时,两种方法均可对其初始化,但改进粒子群算法要比减法聚类算法更有优势;当中心点数目要求大于9时,减法聚类算法就无法对其初始化,而改进粒子群算法则可以满足要求。
(4)采用本文算法进行实验,令粒子群的迭代次数T=30,选取的粒子数为10,聚类中心点的数目取N=15。图1(a)为得到的拟合曲线,并根据该拟合曲线估计与实际输出电压对应的理论位移量。图1(b)为其对应的误差曲线。
由图1(a)可知,聚类中心点并不是均匀分布的点,而是根据周围的实验数据所包含信息的差异程度分布的,从而提高了该算法的自适应能力,并保证用最少的点对输出电压与间隙距离的对应关系进行曲线拟合。在应用到单片机时,不仅减少了存储空间,而且提高了查表效率,降低了单片机的计算复杂度。

图1 聚类中心点数目为15时的实验结果
由图1(b)可知,由于电涡流效应本身的特性,拟合曲线两端的误差较大,但都在精度要求的范围内。根据聚类中心点的数目不同,可以得到不同的拟合曲线,其对应的精度也有所不同,表4列出了不同的拟合曲线对实验数据进行估计后得到的误差值。由表4可知,当聚类中心点数目增加时,其对应的精度也有所提高,随着中心点数目的增加,精度提高的幅度将有所减小。
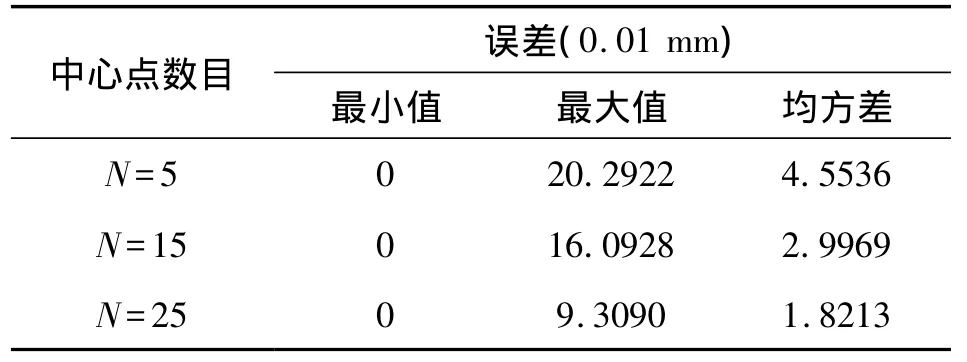
表4 不同中心点数目的误差值
比较表1和表4可知,利用相同数目的中心点对曲线进行拟合时,本文提出方法的拟合结果要明显优于传统的等间距拟合算法,从而更加验证了本文所提算法对曲线拟合更具自适应性。
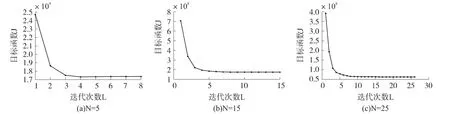
图2 N=5、15、25对应的收敛速度
(5)图(2)为聚类中心点数目N取不同值时,聚类算法所对应的收敛速度。拟合精度的提高是以牺牲收敛速度为代价的,中心点越多,收敛的速度相对越慢,但目标函数的稳定值将会越小。目标函数值随迭代次数的增加而迅速减小,当迭代次数L大于8时,目标函数趋于稳定,由此提高了系统的快速性和实时性。
3 结论
本文基于差动式结构的双线圈脉冲电涡流传感器,针对传感器输出电压与位移量之间存在非线性问题,利用改进粒子群和模糊C-均值相结合的方法对脉冲电涡流位移传感器的实验数据进行曲线拟合,从而使得传感器能够根据实际的输出电压值估计出理论的位移量。通过实验证明,该方法简单、易实现,很好的解决了输出电压与位移量存在的非线性问题,大大节省了单片机的存储空间和查表时间,提高了传感器的检测精度和灵敏度,增强了对不同电涡流传感器特性的自适应性。本方法在国内和印度、印尼等多个国家的热电厂电站锅炉空预器间隙控制系统的电涡流传感器中进行了推广使用,投入使用率达到90%以上,并且测量精度和控制效果有了进一步提高,从而验证了该方法的有效性。
[1] 贺安之,阎大鹏.现代传感器原理及应用[M].北京:宇航出版社,1995,100-101.
[2] 任吉林.涡流检测技术近20年的进展[J].无损检测,1998,20(5):121-125.
[3] 宋念龙,李琦,张新雨,等.基于红外传感器阵列的智能温度传感器研究[J].传感技术学报,2010,23(12):1713-1717.
[4] 王媛媛.耐高压电涡流位移传感器的研究[D].杭州:浙江大学,2006:1-74.
[5] LI Q,ZHANG T,SONG N L,et al.Research On Differential Pulsed Eddy Current Gap Sensor[C]//2010 International Conference on Electrical and Control Engineering,2010:5490-5493.
[6] 郑岗,赵亮.金属厚度的脉冲涡流无损检测研究[J].传感器与微系统,2006,25(4):35-36.
[7] 夏春林,丁凡.双金属材料电涡流差动测厚方法及应用[J].传感器技术学报,2007,20(8):1930-1933.
[8] 郎家峰,杨明,吴晓林,等.基于双涡流传感器的金属材质动态检测系统设计[J].计算机测量与控制,2005,13(5):426-427.
[9] 范九伦.模糊聚类新算法与聚类有效性问题研究[D].西安:西安电子科技大学,1998:1-43.
[10]孙志海,孔万增,朱善安.基于减法聚类算法的视频运动目标定位[J].光电工程,2008,35(7):12-16.
[11]梁炎明,刘丁,任海鹏,等.基于自适应陷波的直拉单晶直径跟踪[J].仪器仪表学报,2010,31(7):1441-1447.
[12]唐巍,郭镇明,唐嘉亨,等.复杂函数优化的混沌遗传算法[J].哈尔滨工程大学学报,2000,21(5):1-5.
[13]吕振肃,侯志荣.自适应变异的粒子群优化算法[J].电子学报,2004,32(3):416-420.
[14]陈贵敏,贾建援,韩琪.粒子群优化算法的惯性权值递减策略研究[J].西安交通大学学报,2006,40(1):53-56.
[15]张浩,张铁男.Tent混沌粒子群算法及其在结构优化决策中的应用[J].控制与决策,2008,23(8):857-862.
[16] GAMES R A,CHAN A H.A Fast Algorithm for Determining the Linear Complexity of a Pseudorandom Sequence with Period 2n[J].IEEE Trans Inf Theory,1983,IT-29(1):144-146.
