基于WI-FI的井下定位算法研究*
2012-06-12刘晓文张秀均郝丽娜郁万里
刘晓文,张秀均,郝丽娜,郁万里,王 杰
(中国矿业大学物联网(感知矿山)研究中心,江苏徐州221008)
在各种监测与监控系统中,节点的位置信息有着非常关键的作用[1],如车辆导航、矿井井下人员定位、医疗看护对象定位[2]、特定资产跟踪管理等。众所周知的GPS(Global Positioning System)卫星导航定位技术在不受干扰的室外可以很好的实现定位[3]。然而,这项技术在室内和非视距环境定位误差较大,对于地下几百米甚至几千米的采矿巷道[4]就会完全失效。随着无线传感器网络的快速发展,无线网络节点的定位使为特殊环境的局部区域提供精确实时的位置信息服务得以实现成为可能。近年来,无线传感器网络定位技术由于广泛的应用前景而得到了迅猛发展。根据不同的网络拓扑结构、无线定位技术及应用环境,国内外学者分别提出了不同的定位算法。常见的无线定位技术有蓝牙(Bluetooth)、红外(infrared)、Wi-Fi(wireless fidelity)、Zigbee、超宽带(ultra wide band)等[5]。
本文采用基于信号强度的定位技术,目前,基于信号强度的室内定位系统已有,比如,Intel研究的PlaceLab系统、Trapeze Networks Location Appliance LA200、Ekahau RTLS、Aeroscout、Cisco WCS 等系统[6],各个系统虽然都是基于信号强度进行定位的,但是,定位原理各不相同。这几款系统都已运用医院、监狱、学校、企业厂房中,但是,它们的定位原理不太适用于煤矿井下狭长的巷道中。
由于煤矿井下巷道的狭长特点,部署有无线信号的电磁环境也因信号的多径效应、驻波等影响变得复杂而无规律。正因为巷道的信道模型复杂,巷道中人员定位的问题也一直是研究的热点。根据井下巷道的特点,我们提出一种适用于煤矿井下的一种定位算法。本文在第1部分介绍了卡尔曼滤波及射频指纹定位算法,第2部分详细介绍了煤矿的环境特征及提出的定位算法,第3部分对提出的定位算法进行了实验,最后进行了总结。
1 基于RSS的定位算法
1.1 卡尔曼滤波算法(Kalman Filter Algorithm)
卡尔曼滤波算法[7-9]用来滤除接收信号强度的噪声,将接收的信号的作为一个离散的系统,没有控制量。可以用下面两式来描述:
上两式中,x(k)是k时刻的经过滤波后的接收信号强度值。A是系统参数此处取1,对于多模型系统为矩阵。z(k)是k时刻的测量的接收信号强度值,H是测量系统的参数此处取1,对于多测量系统,H为矩阵。W(k)和V(k)分别表示过程和测量的噪声。假设成高斯白噪声(White Gaussian Noise),他们的协方差(Covariance)分别是Q,R。
首先用系统的过程模型,来预测下一状态的系统。假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:

式(1)中x(k-1|k-1)是上一状态最优的结果。更新对应于x(k|k-1)的协方差用P表示:

式(2)中,P(k|k-1)是 x(k|k-1)对应的协方差,P(k-1|k-1)是 x(k-1|k-1)对应的协方差。结合预测值和测量值,得到现在状态的最优化估算值x(k|k):

其中Kg(k)为当前时刻的卡尔曼增益(Kalman Gain):
更新k状态下x(k|k)的协方差:

其中I为1的矩阵,对于此处I=1。
在距离接入点20 m处进行采样,在采样过程中对定位卡遮挡产生噪声,每秒采样1次,采集50 s,结果如图1中(a)所示,图1中(b)是经过卡尔曼滤波后的结果。

图1 卡尔曼滤波前后比较
1.2 射频指纹定位算法
射频指纹定位算法[10]的定位过程分为训练采样与定位两个阶段[11]。在训练采样阶段,首先,根据需要确定要进行定位的区域,将定位区域按照规定的大小划分为若干网格。其次,确定坐标原点,确定位置坐标,在划分好的网格位置坐标处用定位卡采集周围接入点AP(Access Point)信号强度值,将采集的数据根据AP的MAC地址存入相应的位置数据库。为了提高采集的信号强度值的可信度,通常采用卡尔曼滤波或多次测量取平均值的方法,还可以根据信号的衰减模型来修正一些偏差较大的数据。射频指纹定位算法如图2所示。
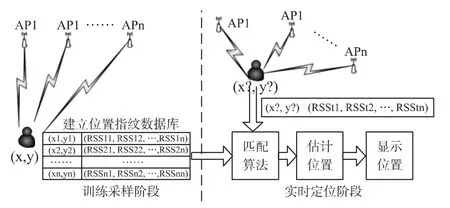
图2 射频指纹定位算法
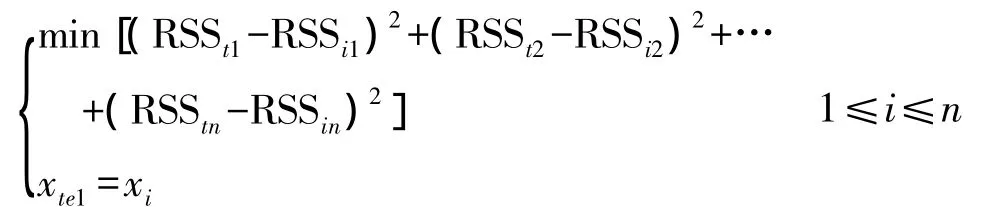
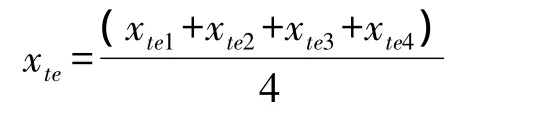
定位阶段,定位卡接收实时的AP信号强度值,根据建立的数据库依据一定的匹配算法估计出定位卡的当前位置。常用的匹配算法有最邻近法、K邻近法[12-13]、神经网络等。本文使用 K 邻近法,取 K=4,换言之,使用与定位点信号强度的均方误差(RSSt1-RSSi1)2+(RSSt2-RSSi2)2+…+(RSStn-RSSin)2最小的四个点 xte1,xte2,xte3,xte4进行求平均,这个平均位置就是测试点的估计位置xte。
再依次计算 xte2,xte3,xte4得到 xte:
2 环境特征及定位算法
2.1 环境特征
在煤矿环境中,AP作为信标节点是沿巷道直线分布的,需要定位的目标称为未知节点,在煤矿特定的环境下未知节点有以下两个基本的特征:
特征1 路径呈直线性 由于巷道的长度长达几百米甚至几千米,而巷道的宽度一般是4 m~5 m,高度在2 m~4 m左右,并且巷道岔口不多,大致呈直线性。在这种特殊的环境中我们可以忽略其宽度和高度影响,将信标节点和未知节点的位置都投影到巷道中线上,定位目标位置一维,降低了定位复杂度。巷道环境人员定位场景如图3所示。
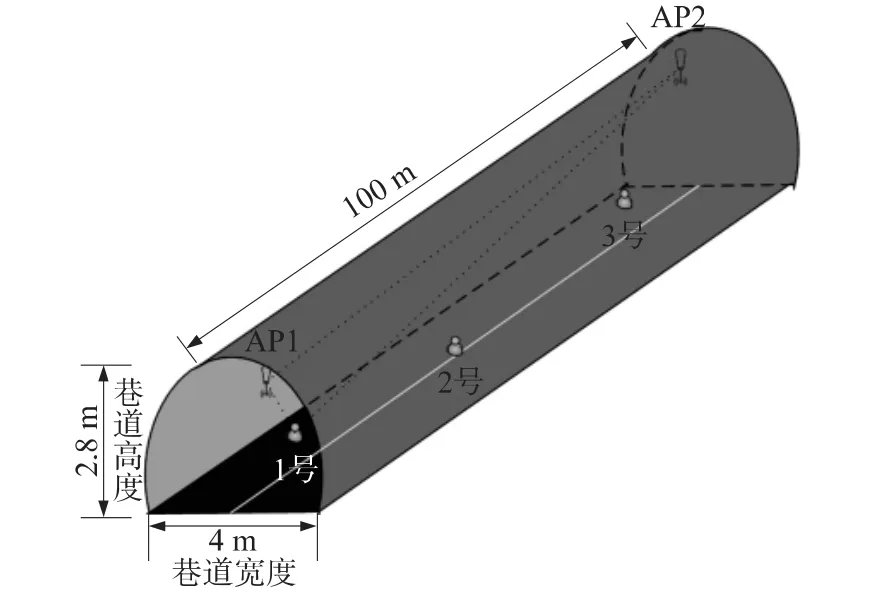
图3 巷道环境人员定位场景
特征2 定位目标移动规律 对于相对固定的未知节点,由于没有移动过程中的干扰,接收的信号强度值的波动较小,可信度高。而巷道中的主要的移动和定位目标是人员和机车,人正常步行速度一般小于3 m/s,约等于1.5 m/s,机车的行驶速度一般小于9 m/s,移动速度相对较慢。
2.2 定位算法的原理
以射频指纹算法为基础,结合巷道的环境特征对定位算法进行了改进,在训练采样阶段对接收的信号强度进行了卡尔曼滤波,把一些离奇的数据摒弃掉,可提高匹配算法的速率,在一定程度上可提高定位精度。在实时定位阶段,在AP附近位置,把定位目标的位置估计到AP所在处,在AP与AP之间时,根据接收的信号强度值和数据库匹配计算得出位置,还有一个补偿算法是前后两次定位的位置不能超过10 m,大大提高了定位精度。具体算法流程如图4所示。

图4 提出的定位算法过程
(1)根据无线信号的传播模型[14]与实测的定位卡的接收信号强度值的结果(如图5)可知,在距离AP的0~5 m范围内随距离的增加信号强度值下降很快,并且成线性的特性。根据这一特性,将在距接入点3 m处接收到的信号强度值设定为阈值RSSh,若定位卡在某一时刻接收的所有的AP的信号强度值中有AP的信号强度值大于此阈值,再根据特征一可以知道这样的AP有且仅有一个,则将定位卡定位为该AP的坐标。可以用数学公式表示为:


图5 接收信号强度随距离变化曲线
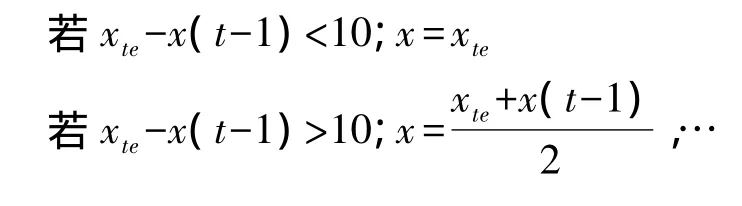
(2)若RSSi>RSSh不成立,就跳过进入下一步,对接收的RSS进行卡尔曼滤波,滤波后的信号强度记作向量RSSk,此时观测到的AP的集合为A,滤波后进行AP选择,选择后的AP的集合为A',再根据最近邻法求从数据库中得到当前估计位置L(xte,yte)。再根据特征2,井下移动目标的速度 v<10 m/s,若上一秒的位置 x(t-1)与当前估计位置 L(xte,yte)的差小于10 m,x=xte。否则,取上一时刻的坐标x(t-1)与当前时刻的估计坐标xte的均值,若此时的差仍然大于10m则继续取均值。在此过程中肯定会带来误差的积累,所以第1步的作用就很关键,每隔一段距离就可以根据第1步进行一次校准来消除积累误差。可用以下公式来描述:
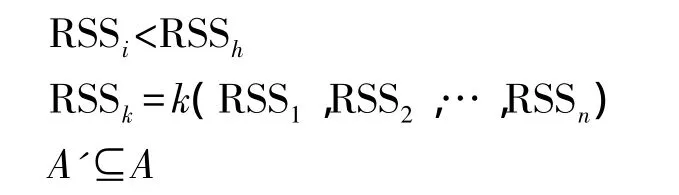
根据射频指纹算法得出xte
3 实验结果及误差分析
为了验证算法的性能,在实验楼的楼道间进行了实验。如图5所示,在一个长60 m,宽2 m,高3 m的走廊中布置两个AP,AP安装在高3 m的天花板上。在采样阶段[14],我们是在宽2 m楼道的横向中线上每隔2 m进行信号强度采样,建立位置数据库。在实时定位阶段,一位携带定位卡的测试人员在走廊中正常走动。定位算法在上位机中实现,此处用java编写了一个简单的定位引擎,显示效果如图6所示。

图6 定位引擎显示效果
在采样阶段,我们是在楼道的中线上进行的,所以在实际定位阶段,人员的估计位置不管是否偏离中线,都会被定位到楼道中线的某处,这一思想主要是根据煤矿井下巷道狭长的特点而提出的。在实验中,用来实现定位的实际位置的RSS值是在每隔5 m处测量一次,并且偏离中线,符合煤矿巷道人员行走过程中的随机分布性。实际位置的RSS信息经由本文中的定位算法计算定位之后得出估计位置。实验后的实际位置与估计位置结果如图7所示。
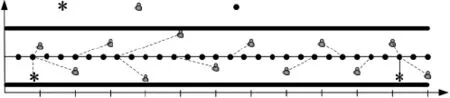
图7 实际位置与估计位置比较
煤矿井下的AP信号强度的变化虽然受多径效应、驻波等影响,但是变化大趋势还是呈对数分布。从我们多次测试的结果可以总结出,在AP附近,定位精度较高,而在AP与AP之间的位置,定位精度较差。但是,从图7可以看出,第7个测试点的定位误差只有3 m,这是我们算法中的估计位置之间不能超过10 m,若超过10 m,启用补偿算法,把估计位置设置到间隔10 m内。在第10个测试点定位误差较小,可以看出,在AP附近的点,会被定位到离AP最近的位置。从图8中可以知道最大误差9 m,经过计算这12个点的平均误差为4m,对于煤矿井下巷道都在几千米以上,宽度在4 m左右,这样的定位精度在煤矿井下还是很高的,是完全可以接受的。
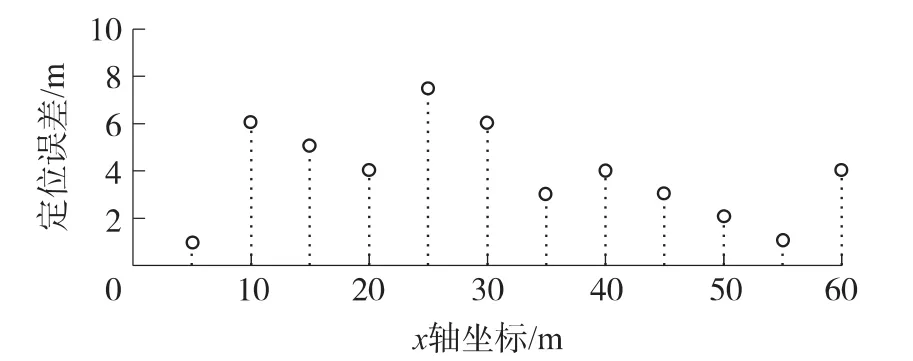
图8 定位误差
4 结论
本文介绍了基于接收信号强度值的射频指纹定位算法,结合煤矿环境特征对其进行了改进。改进后的定位算法提高了未知节点在AP附近的可信度,并减弱了环境对接收信号强度值的影响,解决了未知节点由于人体遮挡等因素引起的未知节点大幅度跳动现象,提高了定位精度。分析实验结果得出,定位平均误差4 m,最大定位误差9 m,最小误差可达到1 m,在井下巷道这样的定位精度完全可以接受。在实验阶段中发现在某些时刻不能接收到未知节点的信号强度值,一定程度上影响了定位的结果,这将是我们下一步的主要研究内容。
[1] 孙利民,李建中.无线传感器网络[M].北京:清华大学出版社,2005.
[2] Xiaoxin Xu,Mingguang Wu,Cheng Ding,et al.Outdoor Wireless Healthcare Monitoring System for Hospital Patients based on ZigBee[J].IEEE Conference on Industrial Electronics and Applicationsis,2010,5(5):549-554.
[3] S.Woo S Jeong,L Xia etal.Application of WiFi-Based Indoor Positioning System for Labor Tracking at Construction Sites:A Case Study in Guangzhou MTR,2011,1(10):3-13.
[4] 史大伟,何继兰.煤矿井下人员定位系统关键技术探讨[J].煤矿机械,2010,9(3):82-84.
[5] Kaveh Pahlavan,Xinrong Li,Juha-Pekka Makela.Indoor Geolocation Science and Technology[J].IEEE Communications Magazine,2002,12(6):112-118.
[6] Kevin Curran,Eoghan Furey,Tom Lunney,et al.An Evaluation of Indoor Location Detaermination Technologies[J].Journal of Location Based Service,2011,2(5):61-78.
[7] Sreenath K,Lewis F L,Popa D O.Simultaneous Adaptive Localization of a Wireless Sensor Network[J].Mobile Computing and Communications Review,2007,11(5):14-28.
[8] Yim J,Park C,Joo J.Extended Kalman Filter for Wireless LAN Based Indoor Positioning[J].Decision Support Systems,2008,45(4):960-971.
[9] 孟文超,俞立,董齐芬等.基于最优信标组的扩展卡尔曼定位算法[J].传感技术学报,2010,4(5):581-586.
[10] Salvatore Cavalieri.WLAN-Based OutdoorLocalization using Pattern Matching Algorithm[J].International Journal of Wireless Information Networks,2007,14(4):265-279.
[11] 张明华.基于WLAN的室内定位技术研究[D].上海:上海交通大学图书馆,2009.
[12] Bahl P,Padmanabhan V N.RADAR:An In-Building RF-Based Location and Tracking System[C]//Proceedings of the IEEE Infocom,Tel-Aviv,Israel:2000,2(9)775-784.
[13] Kushki A,Plataniotis K N,Venetsanopoulos A N.Kernel-Based Positioning in WirelessLocalArea Networks[J].IEEE Transactions on Mobile Computing,2007,6(6):689-705.
[14] 田增山,罗磊,何维.一种分布式的无线传感器网络节点定位算法[J].传感技术学报,2009,22(3):387-390.
