空间机构地面重力补偿设备跟踪研究
2012-06-08从强
从 强
(北京空间飞行器总体设计部,北京 100094)
0 引言
人类对太空探索的脚步加深和卫星应用的快速发展将空间飞行器技术不断向前推进,飞行器的尺寸越来越大,对能源的需求不断增加,对天线的增益和精度要求大幅提高,同时伴随着诸如大型太空望远镜、在轨装配、星际航行、太空武器等新需求的出现,对增强运载系统的运载能力提出越发迫切的要求。但运载系统的尺寸受限,不可能大幅增加,这就只能依靠空间机构技术来解决:飞行器在发射时折叠收拢,入轨后展开并形成规定的构型进行工作。
飞行器在轨道上运行或在其他星球上工作时,其所处的重力环境与地球表面差异很大。如地球轨道卫星所受的离心力与地球重力几乎相抵,航天器处于微重力状态,其重力加速度量级一般在10-3~10-4g;又如,月球表面的重力加速度约为地球表面的1/6,火星表面的重力加速度约为地球表面的1/3。虽然空间机构最终工作在微重力或其他星球重力场中,但其制造、测试都是在地球重力环境中进行的,而重力对空间机构的特性有巨大的影响。如何在地面确认空间机构在空间的性能和可靠性?这就提出了对重力补偿设备的需求,即在地面实现对空间重力环境的模拟,以开展空间机构性能评价及相关研究。
1 实现重力补偿的方法
重力补偿的方法有很多种,主要有跌落法、抛物线飞行法、浮力法、气垫法、悬吊法。
1.1 跌落法
落塔是地面进行跌落试验的重要设施。试验时将试验物体从高塔上落下,利用物体在自由落体过程中所处的低重力或微重力环境来进行试验,自由下落时间为2~5 s。落塔的试验成本相对较低,是一种理想的研究设施。
表1列出了世界上主要落塔的参数,图1是日本的JAMIC落塔,图2是ZARM落塔的加速度-时间曲线。
在物体下落过程中,空气阻力会产生比较大的影响,因此寻求减小空气阻力影响很关键。
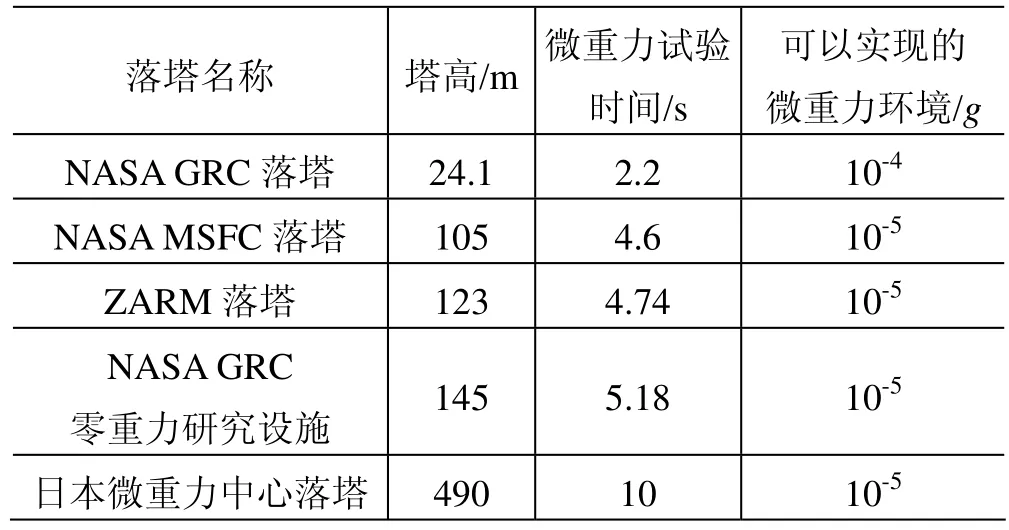
表1 世界上主要落塔的参数Table 1 Parameters of major falling towers in the world
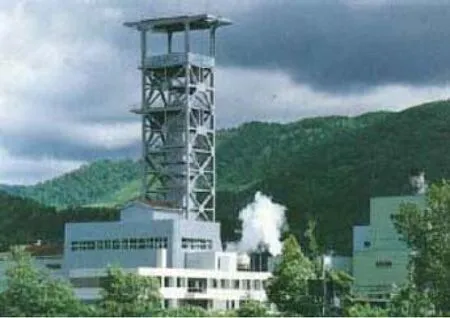
图1 日本的JAMIC落塔Fig.1 JAMIC falling tower in Japan

图2 ZARM落塔的加速度-时间曲线Fig.2 The curve of acceleration versus time for ZARM falling tower
如果希望获得更长的试验时间,则可以使用气球将试验物体带到高空,然后进行释放,如此能获得10-3g的微重力环境。当使用加装推力器的落舱时,可以减小空气阻力的影响,甚至获得10-6g的微重力环境。
1.2 抛物线飞行法
抛物线飞行是指利用飞机在按抛物线弹道飞行过程中加速度的变化来进行试验。利用抛物线飞行可以获得零重力、月表重力(1/6g)、火星表面重力(1/3g),甚至是负重力。NASA和ESA都曾采用这种方式制造微重力环境并开展了相关试验。图3是一个典型的飞行抛物线。
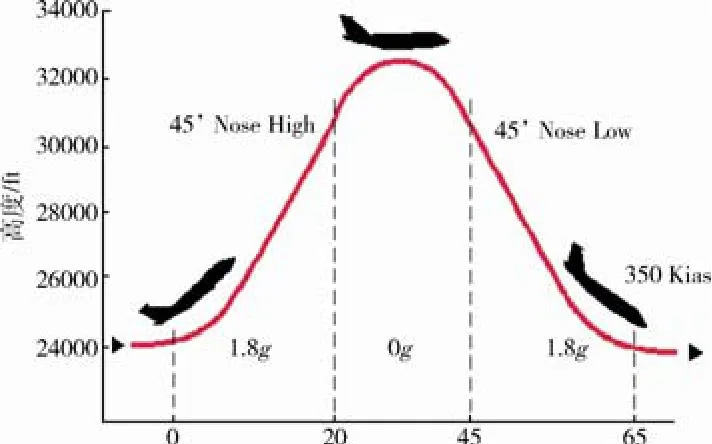
图3 典型抛物线飞行曲线Fig.3 The curve of a typical parabolic flight
NASA约翰逊空间中心将波音707飞机(具有4个涡轮喷气发动机)改装成代号为 KC-135A的抛物线飞机。该飞机一天至少能够完成40个抛物线飞行,每个抛物线飞行大约能提供20~25 s的低重力环境。图4是KC-135A飞机机舱中漂浮的航天员。

图4 KC-135A机舱中漂浮的航天员Fig.4 Astronauts floating in the KC-135A cabin
1.3 浮力法
可以利用空气或水的浮力来全部或部分抵消地球重力来模拟失重环境,常用装置有氦气球、中性浮力设施(俗称水槽)和水槽浮力系统。
1.3.1 氦气球
氦气密度为0.178 6 kg/m3,空气密度为1.293 kg/m3。由于氦气密度不到空气密度的1/6,因此氦气球在空气中将获得较大的浮力,这个力作用在试验物体上就可以与重力相互抵消。
1.3.2 中性浮力设施
由于失重环境下的物体都处于漂浮状态,因此可以利用水的浮力来模拟这种漂浮状态,从而比较精确地模拟失重环境下力的作用与反作用特性。抛物线飞行获得的微重力时间很短,仅有20~25 s,而中性浮力设施可以获得任意模拟时间,是进行长时间空间任务训练的唯一方法。
中性浮力设施一般由主容器(水槽)、供气系统、供水系统、安全救生系统,以及照明、测试、通信、试验服等配套系统组成。
水下模拟训练与太空行走有着较大的差异。为了使身着压力服的受试者在水下达到重力与浮力平衡(即所谓的中性浮力),需要在压力服上施加几十至 100 kg以上的铅块配重,配重的添加会对整个系统的质量分布产生重大的影响。由于水作用力的存在,航天员在水中可以利用游泳动作实现转体甚至平移,但在太空是难以实现平移的。由于水的阻力与物体在水下运动的速度和加速度相关,因此试验中要控制好动作的速度,不宜太快(应≤0.5 m/s),否则会带来较大的误差。必须对水下环境与空间环境的差异进行研究,可以利用计算机进行空间任务的力学特性仿真分析。
进行水下试验时安全问题至关重要,要防止潜水病的发生,同时需要有专业的潜水员来保障安全。由于水的腐蚀性等问题,试验中所使用的设备与真实的不可能完全一样,需要根据情况进行必要的改造。
中性浮力设施主要用于航天员在轨操作训练和空间机器人的测试,对太空操作时周边设施和使用工具的设置是否合理、形状设计是否科学、位置安排是否妥当等进行实际检验,对操作程序的合理性和实际效果进行检查,包括空间机器人与航天员间配合程序的检查。图5是机械臂在水下进行测试试验,图6是航天员在水下进行训练。

图5 机械臂进行水下测试Fig.5 Robot arm being tested under water
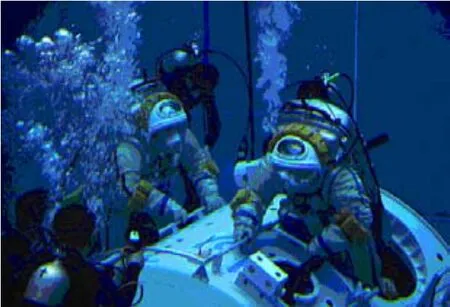
图6 航天员在进行水下训练Fig.6 Astronauts being trained under water
1.3.3 水槽浮力系统
利用漂浮物在水中受到的浮力来支撑物体,当物体做平行于水面的运动时,漂浮物跟随进行运动。这种方法实施起来十分简单,但只适合于速度极慢的展开系统,否则漂浮物在水中会受到较大的阻力,继而影响到展开系统的运动特性。
1.4 气垫法
气垫也称气浮装置,由气源、承载平台和若干个气垫单元组成。利用气垫单元将重物托起,并利用气垫单元与承载平台之间的流动空气层来使移动阻力系数降到0.001~0.005,从而达到轻松移动的目的。在日常生活中它主要用于短距离搬运重物,也可用于船体对接、飞机装配等要求定位准确的场合。
在通气前气垫单元与承载平台接触,压缩空气进入气垫单元后,经由其内部的气道到达底部并通过数个小孔排出,由此产生的浮力将物体托起并与其重力保持平衡。可以用调节阀来调节供气量使气垫单元升起离地0.025~0.25 mm(即气隙),气隙内的气压一般可达0.1~0.35 MPa。供气量要合适,过多会产生颤动,过少则会使气垫单元离地高度不足,移动阻力增大。
由于气垫离开承载平台的间隙很小,要求承载平台平整无缝,平台的宏观起伏和微观粗糙度都不允许超过规定值,否则会因漏气而导致托不起重物。图7所示的是气垫的工作原理,图8是卫星天线使用气垫进行展开试验。
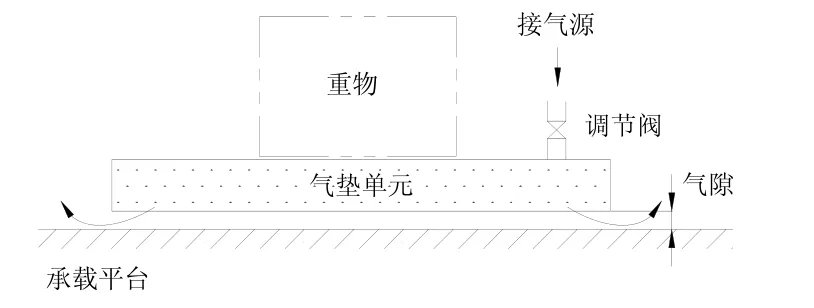
图7 气垫工作原理Fig.7 Working principle of the air cushion
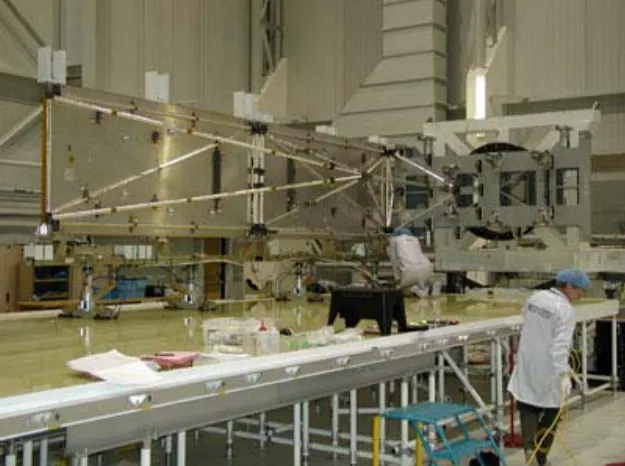
图8 卫星天线使用气垫进行展开试验Fig.8 Using air cushion for the deploying test of a satellite antenna
1.5 悬吊法
悬吊法是在地面实现重力补偿最常用的方法,它是通过悬吊系统给试验物体施加一个通过其质心的集中力来抵消全部或部分重力。
图9是一个典型的悬吊系统,由绳索、滑车、导轨、滑轮、配重等组成。悬吊系统作用在试验件上的拉力大小可以通过配重来调整。拉力在试验件上的作用点应通过质心,否则会产生附加的转矩。滑车可以在导轨上滚动,以保证在试验件运动的全过程都能够抵消重力的影响。
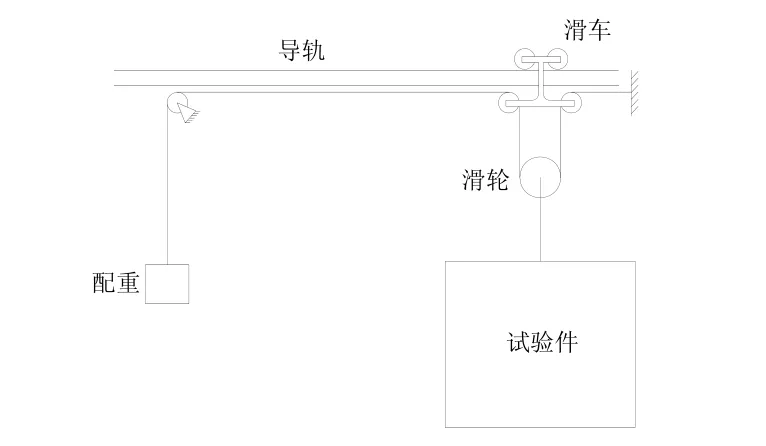
图9 典型悬吊系统的组成和原理Fig.9 The configuration and principle of a typical suspension system
悬吊系统的具体形式有很多种,可以实现一维的直线运动,也可以实现二维的平面运动,甚至是三维空间运动;悬吊系统可以是被动式运动,也可以是主动式运动。各种形式在对待不同的试验对象时可以灵活组合使用。图10是伸展杆在进行一维直线运动展开试验,图11是桁架天线在进行二维平面运动展开试验。

图10 伸展杆在进行展开试验Fig.10 Mast in the deployment test

图11 展开后的桁架天线Fig.11 Truss antenna in the deployed state
2 常用的空间机构地面重力补偿
跌落法可用的试验时间短、空间小,一般不适合用于空间机构的重力补偿;抛物线飞行虽然可以提供一个立体的无重力环境,但也存在着试验时间短的问题,并且费用较高,目前主要用于航天员的训练;中性浮力设施比较适合试验对象运动复杂或不确定并且运动速度缓慢的情况,由于进行试验的产品必须进行改装,因此也不适合空间机构的重力补偿,主要用于航天员和空间机器人模拟漂浮状态的在轨操作测试。以上这些方法只是不太适合用于空间机构的重力补偿,并不是不能用,前苏联就曾使用一架图-104飞机进行抛物线飞行来模拟月球重力加速度,对车轮在月面的附着-牵引特性进行测试。
气浮装置、氦气球、悬吊系统由于没有作用时间和空间的限制、容易实现且资金需求少,目前常被用作空间机构地面重力补偿设备。它们可以单独使用,也可以组合使用。本章结合典型的空间机构对这几种地面重力补偿设备进行详细介绍。
2.1 一维直线运动机构的地面重力补偿方法
套筒式伸展杆、盘压杆、铰接杆等杆状展开机构以及质心(或悬吊点)做直线运动的机构(如使用York架和联动索的刚性太阳翼)进行的都是一维直线运动,其重力补偿方法比较简单,实现的途径也很多。
图12是几种典型的直线运动重力补偿设计原理,这些原理对其他的直线运动展开机构都是适用的。
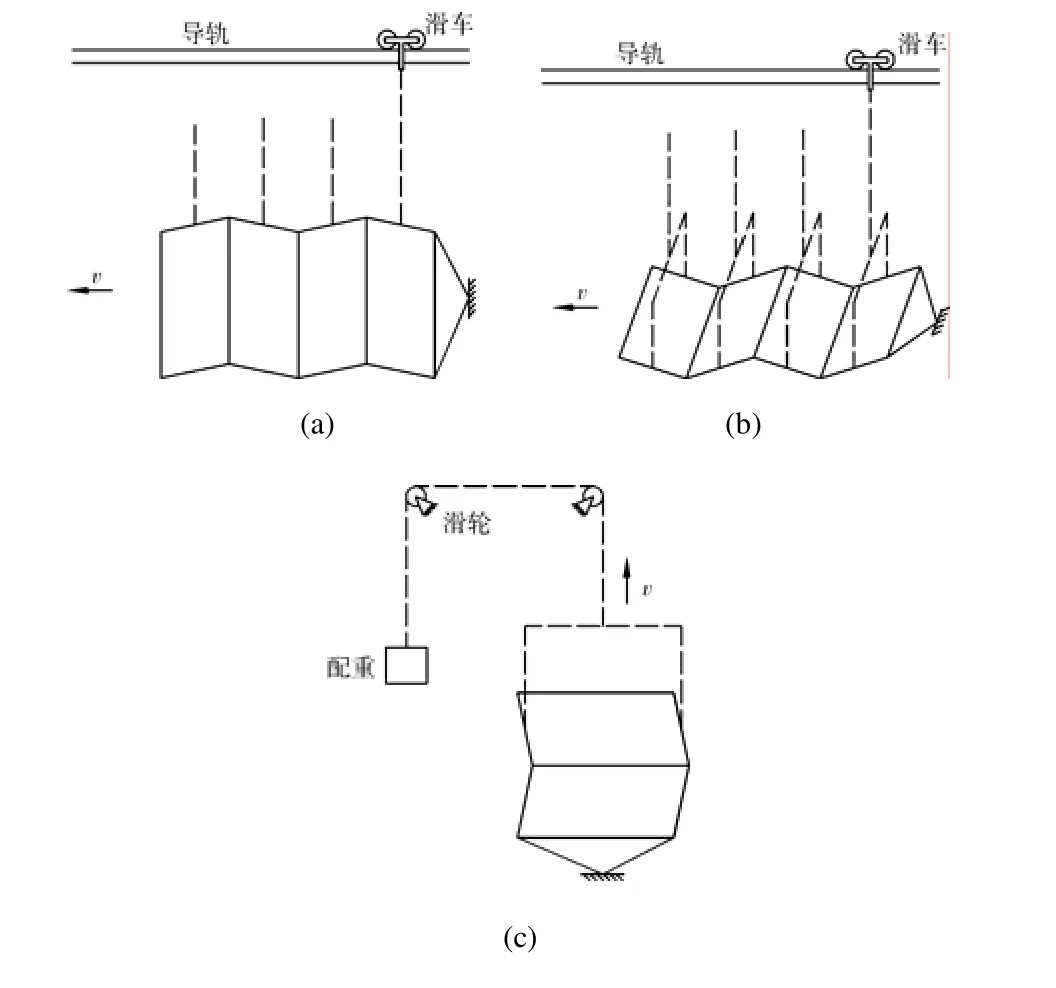
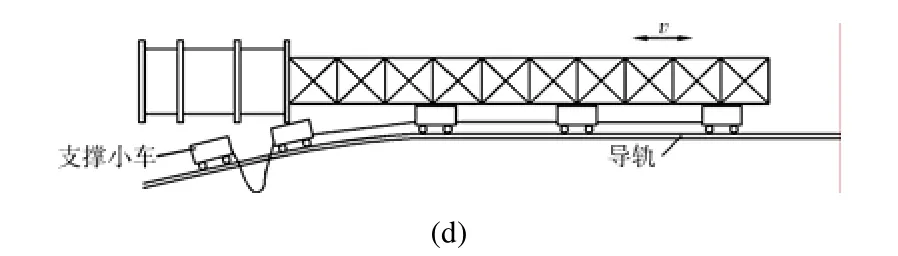
图12 常用一维直线运动机构的地面重力补偿Fig.12 The common ground gravity compensation equipment for one-dimensional linear motion mechanisms
2.2 二维平面运动机构的地面重力补偿方式
抛物面天线、摆动机构、平板雷达天线、肋式网状天线等机构的运动部件的轨迹是二维曲线,悬吊点需要在二维平面中运动。
图13是以抛物面天线为例的3种二维曲线运动的重力补偿设计原理,这些原理对其他的二维运动展开机构也是适用的。
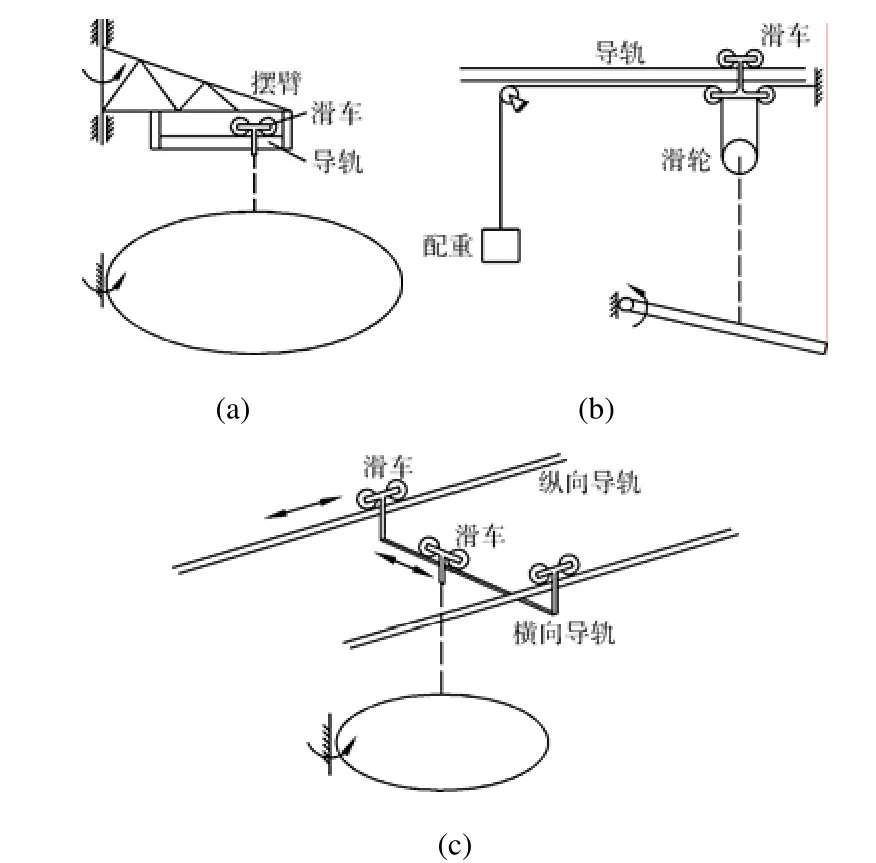
图13 常用二维曲线运动机构的地面重力补偿Fig.13 The common ground gravity compensation equipment for two-dimensional planar motion mechanisms
2.3 三维空间运动机构的地面重力补偿形式
机械臂、天线伸展臂、二维太阳能电池阵等串联机构的末端运动部件的轨迹是空间曲线,悬吊点需要进行三维空间运动。
图14是以两个转轴相互垂直的典型串联机构为例的三维空间运动的重力补偿设计原理,这些原理对其他的三维运动展开机构也是适用的。
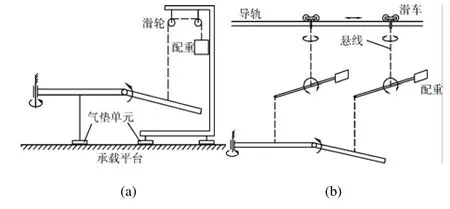
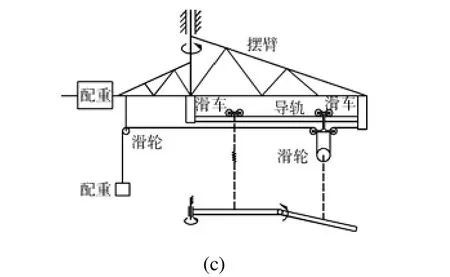
图14 常用三维空间运动机构的地面重力补偿Fig.14 The common ground gravity compensation equipment for three-dimensional spatial motion mechanisms
2.4 组合式地面重力补偿
随着需求的变化和技术的发展,新型空间机构层出不穷,其运动形式已不是简单的一维、二维或三维运动,针对它们的地面重力补偿设备也必须适应这种要求而作出专门的变化。
前面已经介绍了一些典型的地面重力补偿的工作原理,复杂空间机构的地面重力补偿设备都是由这些基本形式进行组合变化而来的,在实际工作中需要根据实际情况灵活应用。图15列出了3种组合形式。
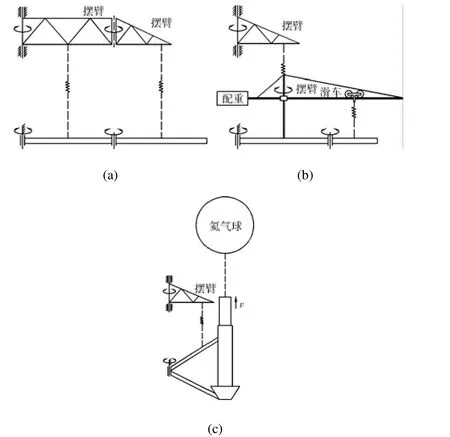
图15 组合式地面重力补偿Fig.15 Combined-type ground gravity compensation mechanisms
2.5 主动式地面重力补偿方法
前面介绍的都是被动式地面重力补偿方法,即支持机构展开用的滑车、摆臂、轮系等随着机构部件的运动作跟随性运动的地面重力补偿。
由于地面设备中这些随动部件给机构产品附加了摩擦阻力和惯性力,对机构产品的运动性能必然会产生或大或小的影响;当这种影响达到一定程度时,就需要考虑主动式地面重力补偿了。主动式地面重力补偿是指通过传感器检测机构部件的运动状态,控制地面设备的执行机构使悬吊点对其进行主动跟随,以保证悬吊点作用力始终在规定范围内。
图16是一个主动式悬吊地面重力补偿系统,其中包括一个竖直方向的被动系统和一个水平方向的可控跟踪系统。其工作原理为:角度传感器实时测量出悬吊绳索偏离竖直方向的角度大小,并将该偏角信号传给水平移动的电机控制系统;水平移动系统中的滑车在电机皮带等的驱动下跟踪机构部件的运动来减小这个偏转角,以保持悬吊绳索的竖直。

图16 主动式地面重力补偿系统Fig.16 An active gravity compensation system
3 地面重力补偿的影响分析及设计原则
通过前面的介绍可以看出,虽然在地面实现重力补偿的方法和形式多种多样,但其一般共同点都是向试验对象施加一个集中载荷来实现对重力的补偿;这并不是真正意义上的“补偿”,而只能算是“模拟”。地面试验时引入的一些边界条件是实际空间飞行时不存在的,这就必然会对机构的运动特性产生影响。如何尽量减少地面试验时的附加影响,使地面试验尽可能真实地反应机构在空间的运动特性,这是设计师必须面对和考虑的问题。
3.1 影响机构地面试验时运动真实性的因素
机构在地面进行运动功能试验时将受到下列因素的影响:
1)空气阻力;
2)部件在受到集中作用力时产生内应力而导致结构变形;
3)地面设备附加的惯性负载;
4)作用力的大小与被平衡部分重量的偏差;
5)作用力偏离质心所产生的弯矩;
6)地面设备的摩擦阻力。
3.2 减小对运动真实性影响的方法
如何抑制上述若干因素对运动真实性的影响是进行地面重力补偿方案设计时必须考虑的,需要采取措施将这些影响降低到可接受的程度。
1)空气阻力的影响及对策
空气对运动机构的阻力与迎风面积的大小成正比,与运动部件和空气的相对速度的平方成正比。好在空间机构的运动速度一般都较慢,虽然有的运动部件(如板状天线)的面积较大,但空气阻力对其影响并不大。
面积较大的空间机构的运动试验应在室内进行,试验时关闭通风系统,使用气球时也要特别注意风速的影响。
2)集中力作用下导致结构变形的影响及对策
地球重力是均匀作用在机构部件上的,而地面重力补偿设备向机构部件施加的作用力都是集中力,由于空间机构部件都具有一定的柔性,必然会在其内部产生内应力从而导致结构变形,当变形达到一定程度时就会影响机构的运动特性。例如图13(b)、13(c),若其中的板状运动部件尺寸大、刚度小,那么就不适合采用这样的悬吊设计。
要合理选择运动部件上的悬吊/支撑点,使集中力施加于部件刚度较大的方向或者增加作用点的数量,以最大限度地减小结构变形。
3)地面设备附加的惯性负载的影响及对策
地面重力补偿设备中的运动跟随部件(如滑车、摆臂、气垫、配重等)都是随着机构部件的运动而运动,其动能来源于机构的驱动动力源。增加的惯性负载对于电机驱动的机构而言影响不大,但会增加弹簧驱动展开机构的展开时间。
设计中要尽量减小地面重力补偿设备中的运动跟随部件的质量,并要求空间机构动力源具有一定的余量,可以根据地面试验结果结合仿真分析得出机构在轨的运动特性,必要时也可以使用主动式地面重力补偿设备。
4)作用力大小偏差的影响及对策
由于机械误差、测量误差等以及摩擦等因素的存在,使得地面重力补偿设备作用在运动部件上的力的大小必然存在偏差,从而不能完全平衡运动部件的重力,二力之差最终作用在运动副上,影响机构的运动特性。
应使用弹簧等低刚度零件作为地面重力补偿设备与机构部件间的连接件,以减小机构运动过程中由于重力补偿设备与机构部件间距离变化而引起的作用力的变化,也可以放宽对地面设备形状精度的要求,降低制造难度。对于使用配重施加的作用力,则必须考虑减小滑轮摩擦阻力引起的作用力误差。同时,机构部件也应具有一定的容差能力。
5)作用力偏离质心所产生的弯矩及对策影响
当作用力偏离运动部件的质心时会在运动部件上施加附加的弯矩,最终作用到运动副上。
需要准确获取运动部件的质心位置,以确定作用力的作用点。如果确定出的作用力在运动部件上的作用点不适合进行连接,则需要在运动部件上适当的部位安装配重,将运动部件质心移到希望的位置上去。增加的惯性负载需要由空间机构来承担。
6)地面设备摩擦阻力的影响及对策
滑轮、摆臂在运动时都会受到与速度方向相反的摩擦阻力的作用,而其所消耗的能量最终都要由运动机构来提供,从而会影响机构的运动特性。
如果机构产品的“健壮性”很好,对地面设备摩擦阻力不敏感,不会导致对机构性能和可靠性的误判,那么就不需要采取什么措施;反之,则需要有相应的办法来将地面设备摩擦阻力减小到可接受的范围内。
如果地面重力补偿设备上的滑车等运动部件的速度方向是单向的,则可以使用“定滑轮+小砝码配重”的方法来抵消摩擦阻力;或者将导轨倾斜一定的角度(如1 m长度倾斜2 mm),利用重力在速度方向的分量来抵消摩擦阻力。如果滑车等运动部件的速度方向是不确定的,就需要由空间机构自身来克服摩擦阻力的影响;一旦克服不了则需要采用主动式地面重力补偿设备。
3.3 地面重力补偿设备的设计原则
通过前面的分析,对地面重力补偿设备的设计原则总结如下,这些原则实际上也是判断地面重力补偿设备设计是否成功的准则。
1)在空间机构运动全过程,作用力应在规定范围内缓慢波动;
2)作用力或合作用力应始终通过被平衡部件的质心,或在质心附近规定的范围内;
3)作用力不能使结构产生影响其运动性能的变形;
4)尽量减小对空间机构运动有影响的附加惯性负载和摩擦阻力作用;
5)重力补偿后的剩余重力、地面设备的附加弯矩、附加惯性负载和摩擦阻力等对空间机构运动的影响,应控制在空间机构的承载能力范围内。
4 地面重力补偿的设计和实施过程
地面重力补偿方案的确定应与空间机构产品的设计同步,只有这样才能在地面试验时更加协调、匹配,才能尽量真实地反映空间机构在空间工作重力环境下的运动状态。
下面将地面重力补偿的设计和实施过程简单总结如下。
4.1 设计过程
1)空间机构设计师应提供必要的参数和要求给地面重力补偿设备的设计师,如机构简图、外形尺寸、部件质量、质心位置、运动轨迹、运动时序、允许的作用力误差、允许的附加载荷等。
2)根据机构部件的运动范围、运动轨迹和运动时序初步制定几种地面重力补偿设备的结构形式,主要是根据本文第2章的内容确定重力补偿形式,以满足空间机构的运动轨迹要求,保证运动过程中没有机械干涉。
3)根据本文 3.3节给出的的地面重力补偿设备的设计原则对方案进行比较优化,通过分析确定作用力的大小和方向、作用位置、连接形式,同时满足连接点自由度的要求;根据作用力误差要求以及机械误差、测量误差的水平,确定地面重力补偿设备与运动部件间的连接件刚度;根据允许的附加载荷,确定地面设备运动部件惯量大小和摩擦阻力大小的限值,并对设计的结果进行校核。
4)必要时,应建立空间机构地面试验状态的数学模型来进行运动学和动力学仿真分析。
4.2 实施过程
1)空间机构试验件配平
配平的目的是:① 确定作用力作用在空间机构部件上的实际位置;② 确定调整质心位置使用的配重块的大小和安装位置;③ 确定作用力的大小。
将空间机构试验件各部件悬挂起来,使用调整吊点位置和安装配重块的方法将部件姿态调整正确,如使转轴水平或与大地垂直。记录吊点位置、配重块的质量和安装位置、悬吊绳的张力。
需要特别注意的是:如果在配平工作结束后还需要在产品上安装其他部件,如热控多层、电缆,则在配平时需要称取这些部件的质量,使用质量模拟件安装在产品部件上参加配平工作,否则配平工作获得的数据是不准确的。
2)地面重力补偿设备的调整和测试
调试的目的是:① 确定地面重力补偿设备中滑轨、转轴、平台等部件的形状精度;② 确定地面设备中运动部件的摩擦阻力。
在地面重力补偿设备与机构部件间的连接件上安装与设计作用力一致的重物,移动重物进行调整并测量滑轨的直线度和水平度。对于摆臂形式的结构,将重物移动到最远端,检查摆臂轴线对大地的垂直度。而对于气垫承载平台,由于其刚度很大,因此不需使用重物,可以直接测量其平面度和水平度。
在连接件上安装重物的情况下,测量地面设备中运动部件的摩擦阻力,以确定抵消摩擦影响的小砝码的质量或者导轨的倾斜角度。
在地面设备调整完毕后,必要时可以使用简化了的空间机构实物模型对地面重力补偿设备进行检验,对运动过程的机械干涉进行检查,对作用力进行全程监测,对运动过程进行录像,为地面重力补偿设备的进一步优化和调整提供依据。
3)空间机构的放置和调整
放置和调整的目的:① 确定空间机构与地面重力补偿设备的空间关系;② 确定空间机构轴线与大地的关系;③ 调整空间机构部件与地面重力补偿设备相应部件间作用力的大小。
将空间机构与地面重力补偿设备进行对准,如将空间机构的转轴与摆臂的转轴对准、将直线运动的方向与导轨方向对准,以确定空间机构与地面重力补偿设备的空间关系。
调整空间机构轴线对大地的水平或者垂直状态并进行测量,应满足规定的要求。
将空间机构的部件与地面重力补偿设备中相应的部件进行连接,调整作用力的大小,同时通过传感器、弹簧秤等测力元件进行检测。
5 结束语
机构产品是空间飞行器的关键执行部件,在地面尽量真实地模拟空间重力环境以评价其运动性能和可靠性是十分必要和重要的。
空间机构产品设计师必须广泛了解各种地面重力补偿设备的原理和一般形式,深刻理解地面重力补偿设备的设计原则,熟练掌握地面重力补偿设备的设计和实施方法,同步、协调地开展地面重力补偿设备与机构产品的设计、实施工作。只有这样,才能更准确地模拟空间重力环境,才能更真实地反映空间机构的功能和性能,才能更深入地分析和理解试验结果,才能更正确地作出结论和判断,这对提高产品可靠性无疑具有重要的现实意义。
(References)
[1]张小苏, 宗文波.国外空间微重力模拟试验技术研究与应用[G]∥空间技术情报研究.北京: 中国空间技术研究院, 2007
[2]樊世超.月面力学环境试验技术研究[G]∥空间技术情报研究.北京: 中国空间技术研究院, 2006
[3]陈必忠.国外大型空间轻质可展开构件及其展开试验评述[G]∥空间技术情报研究.北京: 中国空间技术研究院, 1991
[4]柳宁, 李俊峰, 冯庆义, 等.水下人体模型和试验验证[C]//中国力学学会学术大会论文集, 2005
