空间站能源系统并网供电技术研究
2012-06-08王宇鹏周新顺万成安
王宇鹏,周新顺,万成安
(北京卫星制造厂,北京 100190)
0 引言
随着我国载人航天技术的发展,空间站将成为下一个发展目标。为确保空间站的长期在轨运行,其供电系统的重要性不言而喻[1]。通常,空间站是由多个航天器对接组合而成,各航天器均具备独立的供电系统。但由于受空间位置和相互遮挡的影响,航天器各自的供电系统有可能无法满足自身供电需求,所以在不增加太阳能电池板面积和航天器供电总功率的前提下,有必要实施空间站组合体的电源系统联合并网供电,以实现各组合体之间电能的有效利用[2]。
空间站并网供电是指各舱段对接组合而成的空间站,通过电源变换技术和管理技术实现对各舱段电源系统的供电以确保空间站全部负载正常工作的技术措施[1,3]。空间站并网供电是实现多电源系统电能传输的关键技术,具有供电功率大、多电源系统集成、可靠性高和可人工干预等特点,涉及大功率DC/DC变换、能源管理、测量、控制及通信等诸多技术。
1 “天宫一号”目标飞行器与“神舟”飞船对接后的并网供电
宫一号”目标飞行器与“神舟”飞船实现交会对接后,需要向飞船提供最大功率为 500 W 的供电支持。目标飞行器采用100 V高压供电体制,而飞船沿用 28 V供电体制,需要采用并网供电设备(DC/DC)完成100 V/28 V电压变换,以保证不同供电体制下的供电安全。
对接后进入组合体飞行模式,由目标飞行器发出并网控制接通指令,通过目标飞行器内的并网控制器实现对飞船内负载的供电,其并网供电原理如图1所示。
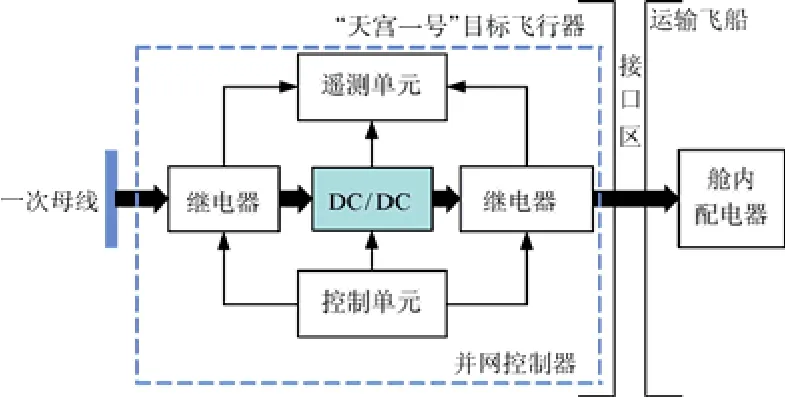
图1 “天宫一号”目标飞行器与“神舟”飞船并网原理图Fig.1 Schematic diagram of parallel power supply between Tiangong–I target spacecraft and Shenzhou spaceship
1.1 “N+1”冗余备份
根据最大输出功率500 W的要求,并网控制器的功率电路采用 4个输出功率均为 170 W 的DC/DC变换器(3热1冷)并联实现对飞船负载的
我国载人航天工程首个空间试验平台——“天供电,如图2所示。
目标飞行器的100 V一次母线通过并网控制器变换为与飞船兼容的28 V母线电压。并网控制器在指令控制下可实现100 V母线或28 V母线的接通或断开,以及备份模块的接通或断开,并能够反馈设备工作状态的参数。
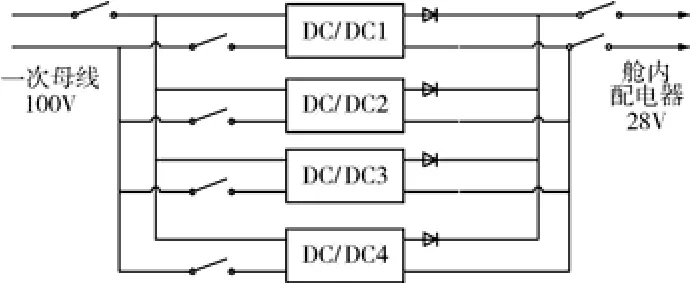
图2 “天宫一号”并网控制器电路图Fig.2 Circuit of a parallel operation controller in Tiangong–I target spacecraft
这种采用多台变换器(冷热备份)并联输出方案的优点在于当某一台变换器故障时,可通过控制指令切断故障变换器母线并接通冷备份变换器继续完成供电,增加了系统的可靠性与可维护性,相比于单台整机型大功率变换器,可缩短产品设计和生产周期。
1.2 多变换器自动均流
“天宫一号”目标飞行器内部的并网控制器正常工作时,3台DC/DC变换器通过各自的隔离二极管并联输出约500 W的最大功率。为了使输出功率不超过要求的最大功率,将每个变换器的最大输出功率限制在(170±5) W范围内。由于各变换器输出电压不一致,输出电压的温度漂移和时间漂移以及输出隔离二极管正向V–I特性的差异,并联工作的各变换器输出电流不会完全相同,但是,在极限(最大输出功率)情况下,变换器可通过灵敏的过流保护电路将输出功率限制在170 W以下。而并联的不均流特性会使各个变换器先后进入输出过流保护状态,最终实现自动均流。因此并联不均流特性不会影响设备的正常工作及变换器的可靠性。
2 国外空间站并网供电方案
国际空间站(ISS)与“和平号”空间站(MIR)是成功运行的多舱段组合的大型空间站,分析研究其中涉及的多舱段并网供电技术方案,对于我国空间站并网供电技术的研发具备借鉴意义。
2.1 ISS的PPC功率互补技术
ISS的供电系统由初级供电系统和次级供电系统组成[4-7],如图 3所示。其中,初级供电系统包括2根功率母线和1个功率母线切换控制单元,每个功率母线具备各自的分流、蓄电池管理和切换单元;次级供电系统则主要由配电控制单元、遥控配电单元及相应的负载组成。两级供电系统之间由母线电压变换单元连接。

图3 ISS供电系统结构图Fig.3 Structure of the power supply system in International Space Station
ISS的太阳电池阵为桁架式结构,8块太阳电池板两两配对,构成4个光伏模块。每个光伏模块的2块太阳电池板分别对应各自的功率母线,经功率母线切换控制单元后向对应的设备供电。各功率母线均配备功率母线控制器,主要负责太阳电池板的转动控制、分流调节、功率切换、蓄电池充放电控制及热控设备供电等。但在同一时间,2条功率母线只受一个功率母线控制器控制,另一个功率母线控制器则处于备份状态。功率母线切换控制单元负责将 2个功率母线的电压送到次级母线电压变换单元,当某一母线故障时,通过切换让另一母线来供电。即当某一功率母线因故障被“禁止”后,可以由同一光伏模块中的另一功率母线对故障母线的部分模块供电。相邻光伏模块的功率母线之间通过功率母线切换控制单元中的大功率固态开关连接,正常情况下开关断开,必要时闭合。
分析ISS供电系统的结构可以发现,其高压母线侧(初级)是一种多母线、故障(应急)状态下可切换的供电方式。该方式下,先关闭“故障源”,再让“替代源”参与供电,两者不会同时工作。每个功率母线正常状况下满足自身设备的供电需求,在故障或应急状态下切换为由其他母线供电。由于功率母线受切换或远程输送等影响,需要通过母线电压变换单元实现向次级稳定电压供电,所以要求母线电压变换单元的传输效率要高,以控制功率损失。另外,由于ISS没有统一的供电体系,因此降低了供电体系设计的复杂性,提高了系统可靠性(对于闭环系统之间的统一调节越复杂,则系统可靠性越低)。
2.2 ISS主体与“曙光号”舱并网供电机制
由俄罗斯负责研制的“曙光号”(Zarya)舱是ISS的第一个组件,也称之为“功能舱”(functional energy block,FGB)[8-9]。FGB具有独立的光伏电源系统,系统组件包括太阳电池阵、分流调节器(RT–50)、镍镉电池组、电池充放电设备、蓄电池电流控制器、母线单元、超级电容器构成的母线滤波器、ARCU(American-to-Russian converter unit)和 RACU(Russian-to-American converter unit)等。ISS中美国研制的部分舱段组件(称之为USOS)和“曙光号”之间的电能交换是通过ARCU和RACU这两种设备来实现(见图4)。
在 ISS建造初期,由 FGB通过 RACU来为USOS供电[10-11]。RACU的输出接USOS的母线电压变换单元输入端,经由母线电压变换单元进一步稳压。USOS的电源系统组装完成后,改为通过ARCU向FGB供电。ARCU有2种类型,分别为输入端口接功率母线切换控制单元的 ARCU 1和输入端口来自母线电压变换单元的ARCU 2。这2种ARCU的输出端口均在FGB的母线单元处。正常情况下,ARCU工作于电压控制模式(voltage control mode)。

图4 ISS主体与“曙光号”并网供电原理图Fig.4 Principle of parallel operation principle between ISS and Zarya
在阳照区,FGB主要依靠太阳电池阵进行供电和充电。如果太阳电池阵无法满足需求,则ARCU开始工作;如仍不能满足需求,则充放电管理单元将工作于缩减充电模式以确保母线电压稳定。进入地影区后,根据ARCU所能提供的功率和负载功率需求有2种情况:若负载需求超过ARCU所能提供的功率,则充放电管理单元将工作于蓄电池放电模式,让蓄电池填补ARCU的功率不足,同时ARCU工作于恒流模式(constant current mode);如果负载需求低于ARCU的输出能力,则过剩的功率将为蓄电池充电,一旦蓄电池充满,ARCU将工作于恒压模式,提供全部的负载需求功率。
2.3 MIR电源系统并网供电技术分析
MIR是由多舱段组合的空间站,各舱段均具备自身完整的电源系统,舱段之间通过电压/电流控制器(voltage/current regulator, VCR)实现并网供电,MIR的电源系统如图5所示[12]。VCR调节来自其他舱段的能量,其输出直接挂在电源系统母线的输出滤波器之前,可实现调压、调流的功能。在
MIR的供电系统中,其母线回线上接入了由大功率固态开关构成的Buss Block单元,负责把太阳电池阵的电能接入到母线上。Buss Block内部开关可以使太阳电池阵处于“stand by”模式。单舱电源系统如果正常工作,则靠“蓄电池+升压装置”供应;如果处于并网模式,则由“蓄电池+升压装置”和VCR并网供应。
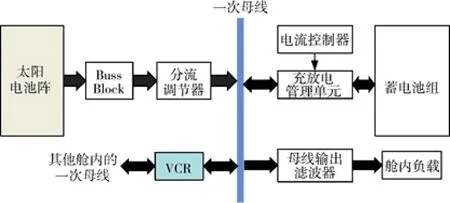
图5 MIR电源系统原理图Fig.5 Configuration of MIR power supply system
对比ISS主体与“曙光号”的并网工作机制,进一步对MIR中的VCR分析可以发现:在阳照区,如果VCR并网工作,则VCR与ARCU一样,工作于调压状态且输出跟随母线电压,实现电能富裕舱向电能缺失舱的功率补充;如果VCR不并网工作,则MIR与ISS类似,通过开关切换来实现由其他舱向缺失舱的功率补充(在Buss Block中实现切换)。在地影区,VCR接收由其他舱传递过来的电能为本舱一次母线提供所需功率,或通过 VCR向其他舱的负载供电。整体来看,VCR与“蓄电池+升压装置”同时工作,既可工作于电压控制模式,也可工作于恒流控制模式。
3 空间飞行器组合体并网供电模式类型
分析总结我国“天宫一号”目标飞行器与“神舟”飞船并网供电、ISS的PPC功率互补技术、ISS主体与“曙光号”舱的并网供电以及MIR的VCR供电方式,目前的空间组合体并网供电模式的技术方案及特点如下:
1)可基于“各舱正常情况下都能满足自身供电需求,应急供电只发生在故障或应急情况下”的原则,在母线单元处由大功率固态开关来实现并网模式的切换。其优点是实现原理简单、系统可靠、母线电压稳定;缺点是不能充分利用缺失舱的剩余电能,造成电力浪费(在具体设计上,也可以通过开关配置实现部分设备切换供电、部分设备仍由本舱供电)。
2)可设计智能功率调节设备,具备调压、限流以及根据指令信号调整参数等功能。设备输入端为功率富裕舱一次母线,输出端为功率缺失舱一次母线。在阳照区,智能功率调节设备工作于电压控制模式,根据母线电压调整输出,和太阳电池阵并网向功率缺失舱负载供电;在地影区,智能功率调节设备输出能力如能满足负载需求,则独自为负载供电,否则和缺失舱蓄电池并网向负载供电。
3)也可以将上述2种方式结合起来,即在阳照区,智能功率调节设备不和系统并网,由大功率固态开关来实现只把部分(或全部)负载切换到由此设备供电;在地影区,智能功率调节设备和蓄电池并网供电。其优点是实现相对简单,并能在地影区充分利用蓄电池资源。
4)通过设置公共母线和智能功率调节设备,将各舱体电源系统通过智能功率调节设备连接在一起,并由统一的电源控制单元集中控制电能的调度,对各舱体内智能功率调节设备的工作模式进行切换,即不论是在阳照区还是在地影区,智能功率调节设备可根据电源控制单元指令,在并网和不参与并网2种工作状态之间转换。这种并网模式的优点是可以方便地实现多舱体并网且可靠性较高,缺点是功率传递过程要2次经过智能功率调节设备,而且多舱段大功率并网时的线路损耗会降低传递效率。
4 我国未来空间站并网供电可采取的方案
我国未来空间站并网供电方案与“天宫一号”并网供电机制相比,在并网系统容量及智能化水平上需要有较大提升。目前,我国后续载人空间站设计为由核心舱、实验舱I和实验舱II组成的多舱段组合体,每个舱段设置独立的电源系统,可在轨独立工作。当对接形成组合体后,各舱段之间势必需要进行电能的相互传递以确保空间站整体负载的供电需要。根据以上分析的国内外空间站多舱段并网供电技术,从方案的可靠性、可行性等角度综合考虑,我国未来空间站并网供电系统可采取“电源管理+智能并网控制器”的供电方案(见图6)。通过分析空间站组合体太阳电池阵的发电能力与负载大小,由电源管理单元控制智能并网控制器来实现空间站电源系统的并网供电控制和在轨自适应调配。通过设置公共母线,将智能并网供电设备以星形方式连接,便于实现多舱段联合并网。智能并网控制器可置于各个舱体内,靠近一次母线。一方面,智能并网控制器通过内部控制电路控制输出端电压,无须远端采样;另一方面,智能并网控制器可接收电源管理单元的统一调度,实现自身工作状态的改变。
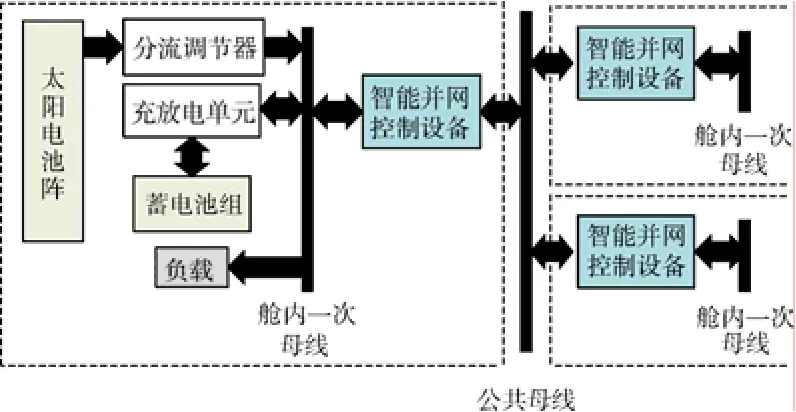
图6 我国未来空间站并网供电可采取的方案Fig.6 A possible parallel operation for our future space station
作为各舱体电源系统间功率传送和调节的核心执行设备,智能并网控制器由电能双向传输的隔离型功率变换器及控制系统构成,其中控制系统包括功率变换器自身的控制电路以及与能够接收、响应电源管理单元控制命令的控制器。控制器的主要作用是接收来自电源管理单元的指令,并将该指令转换成直流变换器自身控制电路能够接收的控制信号,进而实现变换器的控制。直流变换器自身的控制电路需接收控制器的电流、功率流向指令,完成变换器输出电流及功率流向等控制。智能并网控制器的结构如图7所示。
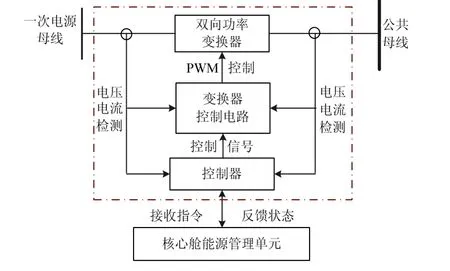
图7 智能并网控制器结构图Fig.7 Structure of the intelligent parallel supply control equipment
由于单台并网控制器的容量有限,在空间站大功率并网传输供电情况下,可借鉴“天宫一号”目标飞行器并网供电设备的设计理念,采用多台智能并网控制器进行“N+1”冗余并联输出,对多个双向功率变换器进行统一控制,并联的智能并网控制器单元需采取并联均流控制,以保证某一台变换器单元失效时其余变换器仍然可以提供稳定的输出功率。功率变换器主电路也可采用单向变换器输出串联二极管组合,以提高系统的可靠性和安全性,避免单台变换器的短路故障对一次母线造成的影响。
5 结束语
本文论述了“天宫一号”目标飞行器与“神舟”飞船并网供电机制,调研并分析了ISS独立功率通道并网供电机制、ISS主体和“曙光号”舱并网供电方式以及MIR并网供电模式,总结了目前国内外空间组合体的几种并网供电模式的类型和特点,经过分析、比较和综合考量,提出了一种适合于我国未来空间站并网供电系统的设计方案。
(References)
[1]马世俊.卫星电源技术[M].北京: 中国宇航出版社,2001: 376-391
[2]Butler M, Dakermanji G, Kennedy L, et al.The STEREO spacecrafts power system[C]// 4thInternational Energy Conversion Engineering Conference, 2006: 626-629
[3]Hyder A K.Spacecraft power technologies[M].London:Imperial College Press, 2000
[4]Hague L M, Metcalf K J, Shannon G M, et al.Performance of International Space Station electric power system during station assembly[C]//Energy Conversion Engineering Conference, 1996-01:154-159
[5]Edward G, Alvin M, Fassburg D H.Development and implementation of stability requirements for the international space station electric power system[C]//Proceedings of the 36thIntersociety Energy Conversion Engineering Conference, 2001: 729-802
[6]Coleman A S.Development of a multi-bus, multi-source reconfigurable Stirling radioisotope power system test bed, AIAA 2004-5713[R]
[7]Hisao Watanabe.A novel utility interactive photovoltaic inverter with generation control circuit[C]//IECON ’98 Proceedings of the 24thAnnual Conference of the IEEE Industrial Electronics Society, 1998, 2: 721-725
[8]Thshihisa Shimizu.A novel high-performance utilityinteractive photovoltaic inverter system[J].IEEE Transactions on Power Electronics, 2003, 18: 704-711
[9]Walls B.Utility aspects of space power-load management versus source management, NASA TM 108496[R]
[10]Huckins E.Space station power requirements and issues,AIAA 94-3788-CP[R]
[11]Hart D S.A solid state power controller module for the International Space Station express rack, NASA 97532[R]
[12]Hoffman D J.Zarya energy balance analysis: the effect of spacecrafts shadowing on solar array performance,SAE 99-01-2430[R]
