微分算子在车牌定位中的应用
2012-06-07白雁力周信东
白雁力,周信东
(桂林电子科技大学教学实践部,广西 桂林 541004)
车牌识别是智能交通系统的重要组成部分,而车牌定位直接关系到的车牌识别的成败。目前常用的车牌定位算法分为两大类:1)灰度图像处理。该方法基于空间信息处理,以检测车牌边界为目的,常见的方法有直方图处理,数学形态学、区域生长和Hough变换等[1-4];2)彩色图像处理。该方法通过对图像背景和目标颜色的区分进行车牌定位[5-6]。两类算法都具有对于低噪声、边缘特征不复杂、车身颜色与车牌颜色明显不同的图片能实现较高定位率的优点,但是由于图像的不确定性,也都存在对高噪声、车辆前脸边缘异常复杂和车身颜色与车牌区域颜色接近的图片定位准确率低的缺点。所以,车牌定位算法的研究和优化仍然是重点。
针对上述两类算法对高噪声、车牌与车身颜色相近图片定位率低的缺点,在微分算子[7]的基础上,进行车牌定位算法研究。该算法从突出车牌区域和搜索车牌边界两方面,进行车牌定位。突出车牌区域采用基于欧氏距离变换[8]原理改进二阶微分算子;搜索车牌边界,利用一阶微分算子对曲线的波峰和波谷进行处理,并通过微分值、曲线占空比等参数确定车牌边界。
1 图像处理中的微分算子
微分算子是图像处理中的重要算子,其算法实现简单,广泛应用于图像边缘检测。常用的微分算子有一阶微分算子和二阶微分算子。
1.1 一阶微分算子
一阶微分算子是根据单个像素在邻域内的灰度跳变,依据边缘邻近一阶方向导数变化规律,突出图像边缘。一阶微分算子有单方向和无方向两种。
单方向一阶微分由竖直方向和水平方向组成,分别为式(1)和式(2)
无方向一阶微分主要是边缘检测算子,如Roberts算子、Sobel算子和Prewitt算子。
1.2 二阶微分算子
从图像的景物细节的灰度分布特性可知,有些灰度变化特性一阶微分的描述不是很明确,为此,采用二阶微分能够获得更加丰富的景物细节[8]。由此可见,二阶微分算子对于图像细节的突出要比一阶微分算子效果好。常见的二阶微分算子是基于3×3邻域的,主要有Laplacian算子和Canny算子。
二阶微分算子可由领域内的二阶方向导数表示,水平方向和竖直方向分别为式(3)和式(4)
2 基于二阶微分算子的车牌定位
根据二阶微分算子在提取细节上的优势,并结合采样图像的情况,本文决定选取二阶微分算子应用于车牌的定位。在车牌定位过程中,基于以下原因,先进行竖直方向定位,再进行水平方向定位:1)车牌在竖直方向边框信息比水平方向边框信息丰富,且易判断;2)车牌在竖直方向的跨度比水平方向的跨度小得多,能通过单波峰特性搜索车牌;3)车牌在竖直方向上的位置,大多数都处于图像的下方,比水平方向容易判断。
2.1 车牌在竖直方向的定位
上文提到,二阶微分算子能够提取更好的图像细节,能有效地帮助车牌定位,但是由于天气、光线等因素的影响,并不能在所有的图像中突出车牌细节,特别是高噪声图像。在这种情况下,竖直方向二阶微分算子已经不能够满足实际车牌定位的需求,必须加以改进和修正,以达到更好的适应性。
2.1.1 改进的竖直方向二阶微分算子
改进竖直方向二阶微分的原理是通过对二阶微分在4个方向进行拓展,然后通过欧氏距离原理将4个方向的二阶微分归一化到竖直方向,改进后的二阶微分能够比单一方向更突出边框。
1)二阶微分算子的拓展
基于3×3模板的二阶微分算子,可以拓展出二阶微分的交叉算子。交叉算子1为

2)欧氏距离变换
所谓欧氏距离就是通常所说的空间两点之间的直线距离。在二维空间中,是两点间的直线长度。设I为n×n的二维图像,I(i,j)表示图像中点(i,j)的像素值。对于I中的任意两点p1(i1,j1)和p2(i2,j2),它们之间的欧氏距离为

由欧氏距离变换的定义可以推导出,基于图像的距离变换是求出每个像素点的最近邻特征点,即能找出图像在多个方向的相似点。欧氏距离变换在数字图像处理中的应用范围很广泛,尤其对于图像的细节提取是一个很好的参照。
3)改进的竖直方向二阶微分算子
通过微分算子拓展和欧氏距离变换原理,本文将所有的二阶微分算子进行组合,并归一化到竖直方向,分为以下2个步骤:
(1)依据欧氏距离变换原理,将水平方向和两个交叉方向的微分算子,进行组合,公式为
2.1.2 投影曲线的平滑和阈值处理
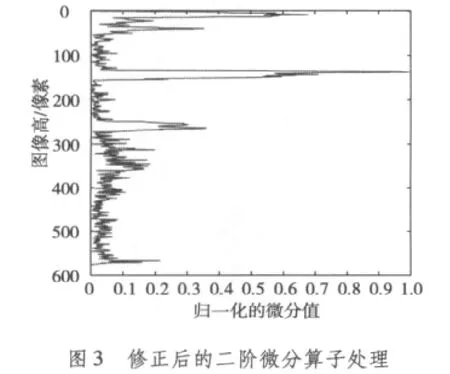
图1为原始图像,由图2和图3进行对比可以看出,通过修正后算子的处理,在投影曲线上去除了很多的噪声影响,能够通过明显的波峰突出车牌区域。但是,为了方便搜索车牌,须在投影曲线上保证车牌区域存在独立的单波峰特性。为了让投影曲线具备这一特性,就必须对投影曲线进行平滑和阈值处理。

图1 原始图像
1)曲线平滑

曲线平滑的目的是让投影曲线具备车牌区域单波峰特性。本文采用高斯平滑函数对曲线进行处理。高斯函数滤波算法实现如下

2)投影曲线阈值处理
平滑处理后,曲线具备车牌区域单波峰特性,但是仍然是一个连通曲线。所以,必须对曲线进行阈值处理,使其波峰具备独立特性。
本文采用的阈值处理方法主要由波谷一阶微分处理、点阈值处理和曲线值均值处理3个部分组成。
(1)波谷一阶微分处理
采用对曲线的波峰点和波谷点进行一阶微分处理,目的在于突出车牌边界;

(2)点阈值处理
采用波谷点微分值和波谷点数值2个条件进行均值阈值处理,目的在于去除不属于车牌的边界。当该点的微分值和曲线值分别低于微分和曲线的均值时,将该点赋值为0;当该点是波谷时,如果微分值大于曲线值,则保留该点。
(3)曲线均值阈值处理
在以上2个处理的基础上,保留曲线中数值大于平均值的点。通过阈值处理,车牌区域必定存在于2个较大微分值的波谷之间,图4是平滑和阈值处理后的曲线图,虚线为阈值处理后仍然存在的波谷微分值。
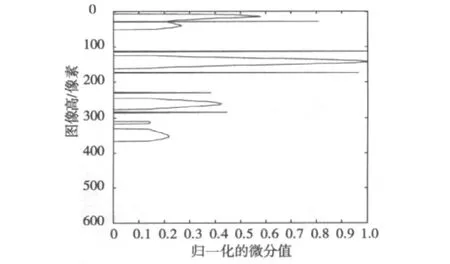
图4 平滑和阈值处理后的曲线
2.1.3 竖直方向搜索车牌
车牌搜索由区域选定和区域判断两部分组成。
1)区域选定
通过上述步骤的处理,在投影曲线上可以发现,车牌所在的区域必定在2个存在的波谷微分值中间,图4中用虚线表示。
2)区域判断
通过图4可以看到,曲线上车牌区域的波峰值并不是最大值,所以在选定区域后,还需要通过参数判断车牌。
标准参数有:参数1,区域内非零曲线值存在的比例;参数2,2个波谷微分值之比;参数3,边界波谷微分值是否是最大或第二大的微分值。
通过对50幅图像的数据统计,得到表1。

表1 参数值统计
根据统计的数据,将3个参数的标准值分别设定为0.7,0.6和1。在搜索中,以任意一个参数作为定位标准,效果都不好。通过对数据统计和分析,3个参数之间存在交集。最后,采用任意2个参数作为定位的标准。定位的统计数据如表2所示。
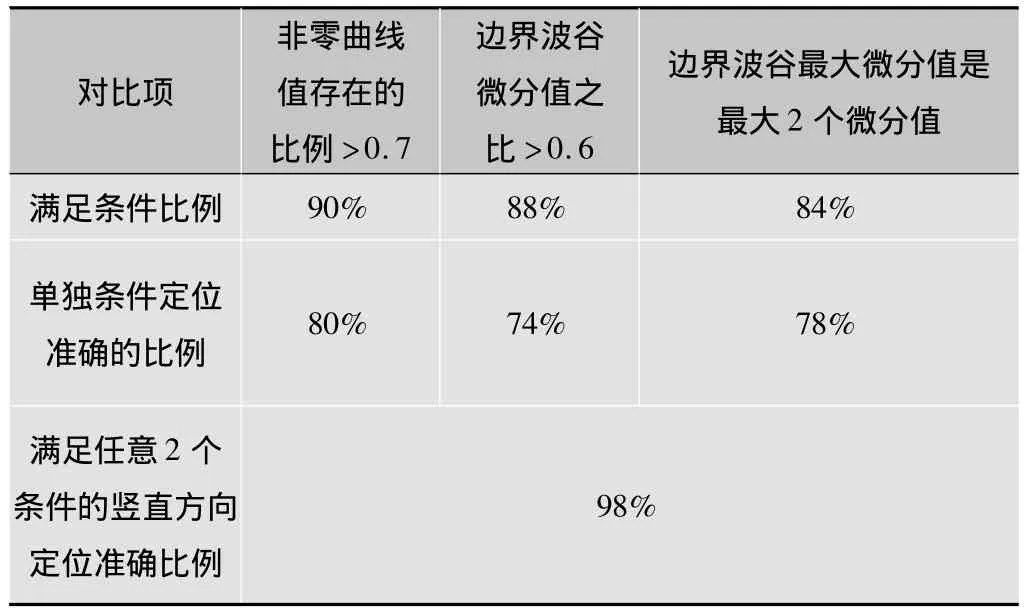
表2 满足参数条件的定位统计
图5是竖直方向上车牌定位效果图。
图5 竖直方向定位效果
2.2 车牌在水平方向的定位
在车牌竖直方向定位后,去除了大部分的干扰。在小干扰的情况下,本文直接采用水平方向二阶微分处理,并对投影曲线进行阈值处理,进行车牌水平方向定位。
2.2.1 车牌区域在投影曲线中的特点分析
通过对水平方向二阶微分处理后的投影曲线(如图6所示)分析,车牌区域存在以下特点:车牌每个字符处于2个波谷之间,整个车牌区域由许多的波谷和波峰组成;在车牌区域中相邻的波谷值和波峰值相差都很大。
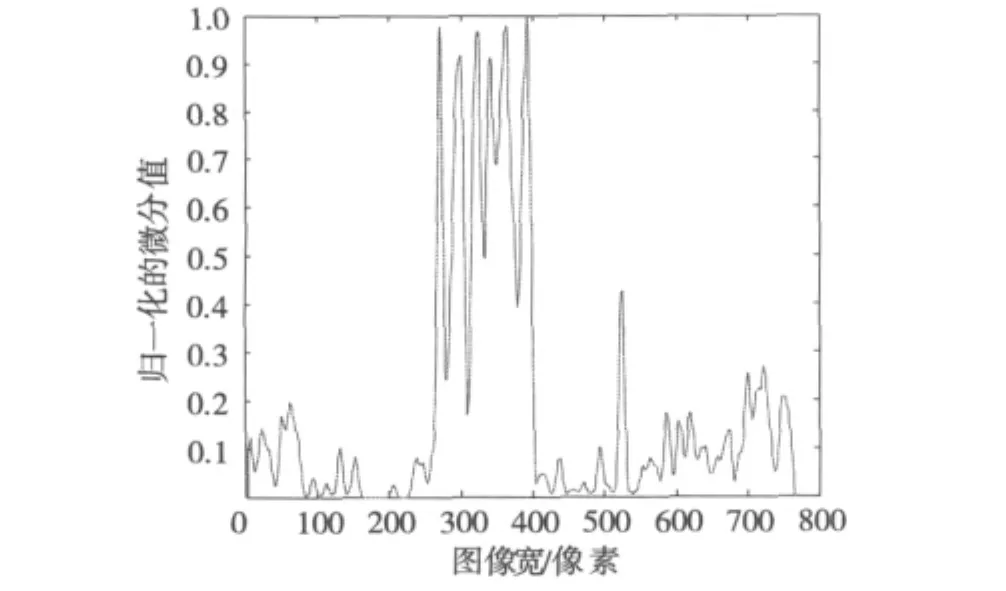
图6 水平二阶微分处理投影曲线
2.2.2 局部与整体相结合的阈值处理方法
通过阈值处理,既要保留车牌区域中较小的波谷点,又要让车牌区域在曲线保持最大连通区域。本文基于车牌区域相邻2个波谷值和波峰值相差很大的特性,采用局部均值和整体均值进行对比的阈值处理方法,对曲线进行处理,具体方法如下:1)计算曲线的整体的均值,并将该值作为过滤条件;2)计算区域均值,即任意相邻的波谷点和波峰点之间区域;3)阈值处理,当区域均值大于整体均值时保留,否则要去除。
通过区域与整体相结合的方法,一方面能保留车牌区域内数值较小的波谷点,突出数值较大的波峰,另一方面能够让实现车牌处于曲线最大的、独立的连通区域。曲线阈值处理效果如图7所示。

图7 曲线阈值处理效果
2.2.3 水平方向车牌定位实现
通过曲线的连通区域可以观察到,车牌的边界都是出于曲线的波峰部分,最终以该连通曲线的第一个波峰点和最后一个波峰点作为车牌的左右边界,如图8所示。

图8 最终定位效果
3 实验结果
为检测算法的稳定性,采用不同环境下的540幅车牌图像进行测试。采集图像的特点为:1)背景多样化,包括城市道路、高速公路路和收费站;2)车牌尺寸不同。
具体测试结果见表3。

表3 各种环境下车牌定位情况
在测试中,有20幅图像定位不准确,原因在于:1)白天环境下,城市道路车辆较多,往往两车之间相距很近,形成定位干扰;2)晚上环境下,城市道路车辆头灯太亮和采集图像噪声太大,形成定位干扰;3)收费站环境下,车辆停车位置和栏杆位置的距离小,特别是大型货车。
4 结论
车牌定位关系着车牌识别系统的成败。在竖直方向定位上,用改进的二阶微分算子进行处理,并通过对投影曲线进行平滑处理、阈值处理及对波峰波谷点的一阶微分算子处理,可以消除车牌颜色和环境不同的影响,得到较好的候选车牌;对候选车牌,利用曲线占空比、波谷微分值比和波谷微分值大小等因素综合判断,实现准确定位。在车牌水平方向定位中,采用二阶微分算子处理,并对投影曲线进行局部均值和整体均值的阈值处理,可以保留车牌字符之间投影值较小的波谷点,让车牌区域处于连通,并最终实现车牌水平方向的定位。该算法进一步改进需要通过大量的实验,优化微分算子和阈值的选取,提高该算法在各种背景下的适应性和稳定性。
[1]SUBHRANSU M,JITENDRA M.Object detection using a max-margin Hough transform[C]//Proc.IEEE Conference on Computer Vision and Pattern Recognition,2009.[S.l.]:IEEE Press:1038-1045.
[2]叶茂亮,刘长松,丁晓青,等.基于笔画分析和形态学的汽车牌照定位算法[J].电视技术,2005,29(5):85-87.
[3]ANAGNOSTOPOULOS C N,ANAGNOSTOPOULOS I,LOUMOS V,et al.A license plate recognition algorithm for intelligent transportation system applications[J].IEEE Transactions on Intelligent transportation System,2006,7(3):377-392.
[4]黄文杰,王海涛,姬建岗.基于公路收费系统的车牌定位与字符分割算法[J].电视技术,2006,30(2):85-87.
[5]聂洪印,周卫东,刘辉.多颜色模型和综合特征下的车牌定位新方法[J].计算机工程与应用,2010,46(12):221-223.
[6]谢建平.一种基于快速最近特征线的汽车牌照识别方法[J].电视技术,2006,30(4):93-96.
[7]阮秋琦.数字图像处理基础[M].2版.北京:清华大学出版社,2009.
[8]孙即祥.图像处理[M].2 版.北京:科学出版社,2009.
