自适应算法在单轴激光惯导初始对准中的应用*
2012-06-07冷传营刘锡敬
冷传营 刘锡敬
(海军潜艇学院 青岛 266042)
1 引言
单轴旋转激光惯导系统可抑制陀螺常值漂移和加速度零偏引起的系统误差,已成为我国船用惯导系统的主要研究对象之一[1]。初始对准是捷联惯导系统进行导航的前提,对准的精度与速度直接关系到惯导系统的精度与启动特性。卡尔曼滤波技术在惯导初始对准中应用广泛。但在实际应用中,卡尔曼滤波需要事先知道研究对象的数学模型和噪声的统计特性。在不准确的数学模型下进行滤波,会导致很大的估计误差,甚至导致发散。由Sage和Husa提出的极大后验估计器具有原理简单、实时性好的特点,在惯性技术中得到了广泛的推广和利用。
2 Sage-Husa自适应滤波算法
Sage-Husa自适应滤波计算不断地利用量测数据估计和校正噪声统计特性与模型参数,从而保证滤波始终处于正常状态,因此该方法特别适用于模型有误差和对噪声统计特性不明确的系统[2]。
设系统的状态方程为

Wk-1,Vk为互不相关的白噪声序列,其方差和均值分别为

Sage-Husa自适应卡尔曼滤波算法如下[3]:


在对单轴旋转激光惯导进行初始对准时,系统噪声一般由惯性器件组合的随机误差引起,比较容易进行建模估计,相反地,量测噪声受工作环境影响很大,不确定性很大,很难确定其统计特性。因此,实际的工作中,模型的变化主要由量测噪声的不确定性引起,所以在对系统进行自适应滤波校正时,只对观测噪声方差阵Rk和观测噪声均值rk进行估计,这样可以减少计算量,提高数据处理速度。
3 系统动基座初始对准误差模型
3.1 旋转方案设计[4]
导航坐标系采用地理坐标系——东北天坐标系。方案设计为正反转停,转动方式如图1所示:先绕oz轴正转180°,停止一段时间Th;再反转180°,停止Th时间;接着反转180°,停止 Th时间;再正转180°,停止一段时间Th。以上转动次序为一个周期,之后按上述顺序循环转动。
3.2 动机坐初始对准状态方程
假定3个陀螺漂移误差模型相同,均为一阶马尔科夫过程和白噪声之和[5]:

其中:

式中:Tg为一阶马尔科夫过程的相关时间;ωmi为激励白噪声。
加速度计误差ΔAx、ΔAy主要含有零位偏置ΔAxb、ΔAyb和白噪声ωAx、ωAy:

将陀螺漂移和加速度零偏扩充为状态变量,则滤波器的状态方程为

式(6)中,状态向量和系统噪声分别为

其中

图1 惯导单轴旋转方案
式中,R 为地球半径,ωie为地球自转角速度,Cij(i,j=1、2、3)为捷联矩阵中的元素。
3.3 动基座初始对准量测方程
选取两个位置误差作为观测量,则系统的量测方程如下:

式中,Z为观测向量,Z=δφ[]δλT;X为系统的状态变量;V是系统观测噪声矢量。
4 仿真实验与分析
设仿真实验条件如下:φ取32°,载体速度为Vx=5m/s、Vy=0m/s,陀螺漂移为0.003°/h,加速度计零偏为10-4g,惯导三个失准角分别为φx=10′,φy=10′,φz=25′,采样周期为1s,方位轴旋转角速度为1r/10min,为了验证Sage-Husa自适应滤波对存在较大模型误差时的滤波效果,取E(Vk)=5rk,E(VkVTj)=100Rkδkj。分别采用kalman滤波算法和自适应滤波算法估计三个失准角,均方根误差曲线如图2所示。
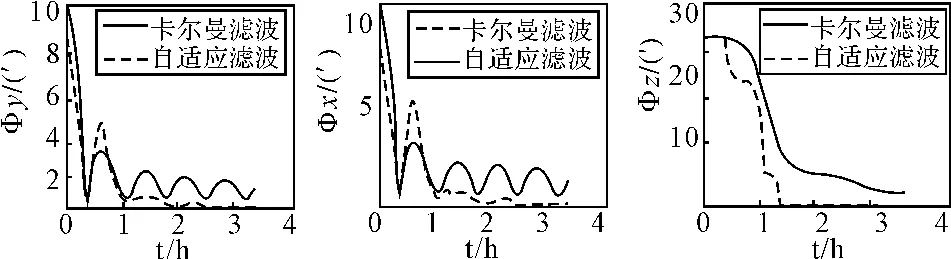
图2 三个失准角的估计误差曲线(1σ)
仿真结果表明,当存在较大模型误差时,Sage-Husa自适应滤波相对于传统kalman滤波的估计误差明显减小,稳定性也有了一定的提高。
5 结语
单轴旋转激光惯导系统动基座初始对准过程中,由于环境的变化,对噪声的统计特性很难确定,会降低滤波精度,甚至导致滤波发散,自适应滤波算法能够不断地对噪声统计特性进行实时的校正,提高了滤波的精度与稳定性。
[1]关劲,李仔冰.旋转式捷联惯导系统精对准方法[J].中国惯性技术学报,2010,18(4):396-400.
[2]徐景硕,秦永远,彭蓉.自适应卡尔曼滤波遗忘因子选取方法研究[J].系统工程与电子技术,2004,26(11):1152-1154.
[3]卞鸿巍,金志华,等.组合导航智能信息融合自适应滤波算法分析[J].系统工程与电子技术,2004,26:1449-1459.
[4]钱伟行,刘建业,赵伟,等.基于转动基座的SINS初始对准方法研究[J].宇航学报,2008,29(3):928-932.
[5]万德钧,房建成.惯性导航初始对准[M].东南大学出版社,1998:36-62.
[6]秦永元.惯性导航[M].北京:科学出版社,2006:23-37.
[7]王其,徐晓苏.旋转IMU在光纤捷联航姿系统中的应用[J].中国惯性技术学报,2007,15(3):265-268.
[8]王荣颖,许江宁,卞鸿巍.基于可观测分析的方位旋转式惯导初始对准仿真研究[J].中国惯性技术学报,2009,17(1):15-20.
[9]翁海娜,姚琪,胡小毛.舰船单轴旋转激光捷联惯导系统动态初始对准[J].中国惯性技术学报,2012,20(1):34-38.
[10]董明杰,汪渤,石永生.旋转-静止混合对准方案在旋转火箭弹中的应用[J].中国惯性技术学报,2012,20(1):1-6
[11]朱海,莫君.水下导航信息融合技术[M].国防工业出版社,2002:079-112.