舰船摇摆下探雷声纳工作参数优化设置研究*
2012-06-07王旭升
肖 军 王旭升
(91388部队 湛江 524022)
1 引言
在现代海战中,水雷是舰艇行动的一个重要威胁。探雷声纳是目前水雷探测的最有效方式。由于探雷声纳没有稳定平台,声纳基阵跟随艇体的摇摆而摇摆,不同时刻多波束在海底的照射区域会发生很大的变化。对于扫雷指挥员来说,舰船摇摆下探雷声纳在海底的有效搜索面积是其关心的一个重要的声纳性能指标。为了能够高效扫清某片海域,需要正确设置扫雷舰航速、声纳工作量程、基阵指向角和搜索方式等工作参数[1~2]。本文在建立基阵摇摆模型和探雷声纳多波束照射海底模型的基础上,对舰船摇摆下探雷声纳的工作参数进行了优化设置,对于扫雷指挥员根据当时情况下达扫雷指令有重要的指导意义。
2 舰艇摇摆模型
2.1 舰船摇摆运动
舰艇在航行时,除了航行方向的运动外,还有波浪引起的强迫摇摆,艇体的摇摆是复杂的三维空间运动,包括横摇、纵摇、首尾摇和振荡升沉等运动。舰艇的振荡升沉运动是艇体在风浪下发生的平移运动,幅度相对较小,本文只讨论舰艇的摇摆而忽略舰艇的振荡升沉运动。探雷声纳无稳定平台,声纳基阵与艇体刚性连接,因此基阵摇摆是绕舰艇中心摇摆的结果,近似为简谐运动[3~5]。

图1 基阵随舰艇摇摆示意图
图1为基阵随舰艇摇摆示意图,o为舰艇摇摆的中心,oa为基阵中心。以o为坐标原点建立舰艇三维直角坐标系,声纳基阵与艇体刚性连接,随舰艇绕X轴、Y轴、Z轴分别进行横摇、纵摇和首尾摇运动。对舰艇摇摆规律的分析表明,在4级海况下,不同吨位舰艇横摇振幅一般为5°~15°,平均周期约为9s,纵摇振幅一般为2°~6°,平均周期约为6s,首尾摇振幅一般为1°~3°,平均周期约为6s[1]。扫雷舰的吨位较小,吃水较浅,摇摆幅度比一般舰艇偏大[6]。
2.2 基阵摇摆模型
由于基阵中心和舰艇摇摆中心不重合,舰艇摇摆时,基阵中心相对舰艇中心存在线位移。假设舰艇坐标系绕坐标旋转一个角度α,则基阵中心oa在原坐标系中坐标[xa,ya,za]T与旋 转 后 坐标oa′[xa′,ya′,za′]T之间关 系 可用下式表示。
式中T(α)称为变换矩阵。假设某时刻t,舰艇的横摇为φ(t),纵摇为θ(t),首尾摇为ψ(t)。则此时对应的变化矩阵T(α)如式(2)所示。

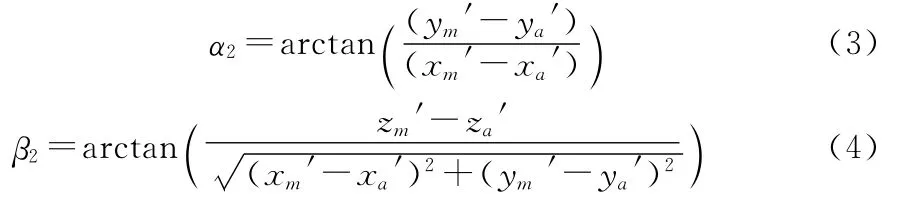
由于舰艇的摇摆,基阵水平角和俯仰角会随时间发生变化。假设M[xm,ym,zm]为基阵中心法线上一点,舰艇静止时OaM 的水平角和俯仰角分别为α1和β1,t时刻M 点坐标变为 M′[xm′,ym′,zm′],则t时刻法线oa′M′所对应的水平角α2和俯仰角β2可表示如下。
3 探雷声纳三维多波束模型
3.1 多波束照射海底模型
探雷声纳属于高频主动声纳,多波束照射海底模型如图2所示。以基阵中心oa为坐标原点建立基阵三维直角坐标系,oaM 为基阵的中心 法 线,oaC、oaD、oaE、oaF为多波束探测“锥体”的四条边界线。基阵法线oaM 与oaXaYa面的夹角即基阵俯仰角,oaM 在oaXaYa面上的投影与oaXa轴的夹角即基阵水平角。多波束探测“锥体”与海底平面相切形成的截面即探雷声纳在某次脉冲发射下的海底“照射”范围。在声纳作用距离和工作量程的限制下,多波束探测“锥体”的四条边界线很可能不与海底相交,另外在一定声速梯度下,声线在垂直面内会发生弯曲,这些因素都会影响实际海底“照射”区域,需要根据实际情况进行修正。
如图2所示,若已知探测海域的声速梯度、海深和声纳作用距离,给定基阵指向和工作量程,利用基阵、波束和海底三者之间的几何关系即可确定声纳在海底的“照射”区域ABCD。声纳“照射”的最远距离应为声纳作用距离和工作量程两者之间的最小值[7]。
3.2 探雷声纳有效搜索面积
在探雷声纳基阵角度相对舰艇保持不变的情况下,因舰艇摇摆导致基阵的实际水平角和俯仰角会随时间发生变化,另外舰艇具有一定速度,所以探雷声纳连续发射的多个脉冲在海底的“照射”区域只能部分重叠,即连续多幅声纳图像对应的海底区域是不一样的。如果在连续多幅声纳图像中,都出现了某个可疑“亮点”,且该“亮点”在图像中的位置呈现某种规律性的变化,则该“亮点”很可能为疑似水雷回波。根据水雷“亮点”的辨识过程,定义探雷声纳发射脉冲连续“照射”N次以上的区域为探雷声纳的有效搜索面积[8~9]。如图3所示,阴影部分所围成的区域即为N取3时的有效搜索面积。N可以根据扫雷任务需要设置,N取值越大,水雷辨识结果的可信度越高,但声纳的有效搜索面积越小。有效搜索面积为多个海底扇形区域的重叠面积,其大小可用多边形计算方法计算得出。
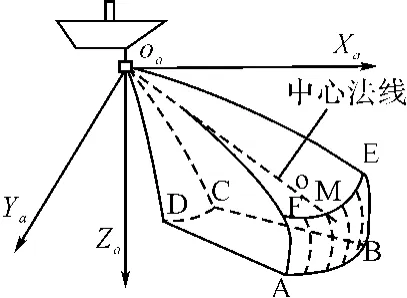
图2 探雷声纳三维多波束模型

图3 有效搜索面积示意图
4 探雷声纳最优工作参数设置建议
作战使用时,影响探雷声纳作战效能的工作参数主要包括舰艇航速、工作量程、基阵初始指向角(方位角和俯仰角)和自动搜索方式等。舰艇航速的变化会影响相邻脉冲在海底的重叠区域,不同的基阵初始指向角、不同工作量程和不同搜索方式下,探雷声纳在海底的照射范围有很大区别。因此选择适当的声纳工作参数对于优化探雷声纳有效搜索面积非常重要。本节从探雷声纳的作战使用出发,以有效搜索面积最大化为准则,给出了不同海洋环境参数下声纳的最佳工作参数。如无特别说明,本节定义连续3个脉冲在海底照射范围的重叠面积为声纳的有效搜索面积。
4.1 最佳扫雷航速
舰艇的航行会带动声纳基阵的运动,航速的变化会改变相邻波束在海底的重叠面积。航速太小影响舰艇的扫雷效率,航速太大又不利于舰艇的避雷。
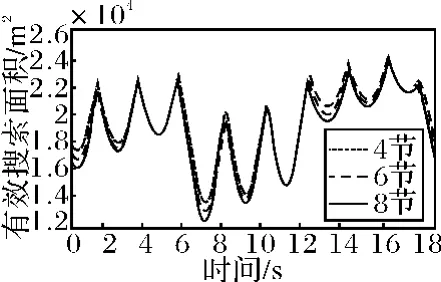
图4 航速对有效搜索面积的影响
图4所示为不同航速下探雷声纳有效搜索面积一个摇摆周期内的仿真曲线图。假设声纳基阵方位角10°,俯仰角2°,海深40m,量程[50,350]m,舰艇横摇8°,纵摇3°,首尾摇1°,声速梯度采用东海某海域春季声速梯度[10]。从图中可以看出,航速的变化对有效搜索面积的影响可以忽略不计,考虑到大航速下不利于舰艇的避雷,建议扫雷舰工作航速为6节左右。
4.2 最佳工作量程
探雷声纳工作环境为浅海,在声速梯度和作用距离的制约下,实际工作时主要采用[50,350]m 和[200,500]m 这两种量程。图5比较了不同海深下采用两种量程获得的有效搜索面积随基阵俯仰角的变化规律。定义图中两条曲线的交点对应的俯仰角为临界俯仰角。假设舰艇横摇8°,纵摇3°,首尾摇1°,基阵方位角10°,声速梯度采用东海某海域春季声速梯度。
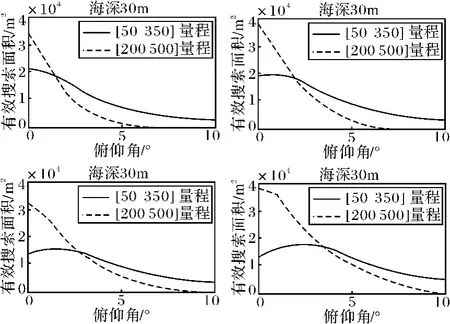
图5 不同工作量程下有效搜索面积对比
从图中可以看出,两种量程下有效搜索面积随俯仰角的变化规律基本一致,相对[50,350]m 量程,[200,500]m量程下有效搜索面积对俯仰角的变化更为敏感。以有效搜索面积最大化为准则,当基阵俯仰角小于临界俯仰角时,适宜采用[200,500]m量程;当基阵俯仰角大于临界俯仰角时,适宜采用[50,350]m量程。且临界俯仰角随着海深的增大而增大。
3.3 最佳基阵初始指向角
基阵初始指向角包括初始方位角和初始俯仰角,如果存在这样一个角度,在该基阵指向下声纳有较大的有效搜索面积,且该面积在一个摇摆周期内比较稳定,那么认为该指向角为最佳初始指向角。
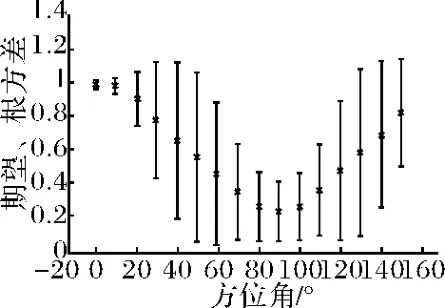
图6 最佳基阵方位角选择示意图

图7 最佳基阵俯仰角选择示意图
图6与图7分别表示探雷声纳有效搜索面积的期望与根方差随基阵初始方位角与初始俯仰角的变化示意图。图中星号与线段长度分别代表有效搜索面积的期望与根方差值。假设海深40m,舰艇横摇8°,纵摇3°,首尾摇1°,量程[200,500]m。从图中可以看出,遵循“期望大,根方差小”的规律,当方位角在-30°~30°范围内,俯仰角在0°~3°范围内时,有效搜索面积的期望值较大,根方差值较小,此范围即为基阵初始指向角的最佳工作范围。
3.4 最佳自动搜索方位角范围
探雷声纳搜索方式包括自动搜索与手动搜索,常见的自动搜索方位角范围包括±25°搜索和±50°搜索,扫描方式为从大舷角方向扫描至舰艏方向,两舷交替搜索。假设方位角范围为±50°,则基阵按此顺序旋转:50°→25°→0°→-50°→-25°→0°→50°。对于一定的自动搜索方式,假如在此搜索方式下声纳在海底形成的搜索带最宽且不存在漏扫区域,则此搜索方式最佳。
图8和图9分别表示在±25°与±50°自动搜索方位角范围下声纳在海底形成的搜索带,由于受摇摆的影响,不同时刻声纳的有效搜索面积大小不一。从图中可以看出,与±50°搜索方位角范围相比,±25°范围下声纳多波束能对搜索海域进行有效地覆盖,且不存在漏扫区域,搜索带宽度能达到±200m左右。因此可以判断±25°方位角范围为最佳的自动搜索方位角范围。

图8 ±25°方式下海底搜索带
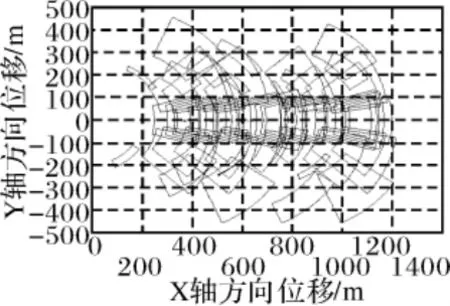
图9 ±50°方式下海底搜索带
5 结语
改变海洋环境参数(海深、声速梯度、摇摆幅度等),上述结论仍然成立。本文通过建立探雷声纳基阵随舰艇摇摆模型和多波束照射海底模型,定义了探雷声纳的有效搜索面积,给出了不同海洋环境下探雷声纳的最优工作参数设置,所得结论对探雷声纳的作战使用有重要的指导意义。
[1]冉磊,李庆民,李华.探扫结合定点清除作战仿真研究[J].舰船电子工程,2011.13(1):104-107.
[2]曲志栋,马爱民.反水雷作业中搜扫路线优化研究[J].指挥控制与仿真,2008,30(2):38-40.
[3]李学忠,黄守顺,林其生,等.船用摇摆试验台建模和控制系统设计[J].电气传动,2006,36(11):10-11.
[4]谈振藩,乐惠康,原东升.猎雷声纳基阵姿态的稳定与控制[J].船舶工程,2005,27(30):62-67.
[5]刘胜,邓志红,李殿璞.猎雷声纳基阵运动姿态估计与控制研究[J].哈尔滨工程大学学报,2000,21(2):1-5.
[6]李志华,王树宗.舰船摇摆下鱼雷空中弹道研究[J].鱼雷技术,2005,13(2):40-43.
[7]魏来,周穗华,张静远.基于射线声学的浅海近程声传播仿真与应用[J].鱼雷技术,2009,17(5):35-39.
[8]汪炘,姜可宇.探雷声纳图像仿真技术[J].声学技术,2010,35(12):10-15.
[9]肖军,姜可宇.探雷声纳有效搜索带仿真研究[J].指挥控制与仿真,2011,33(5):72-75.
[10]张旭,张永刚.中国近海声速剖面的模态特性[J].海洋通报,2010,29(1):29-37.