航母编队区域防空部署研究*
2012-06-07纪峰波向凡夫管莹莹
纪峰波 向凡夫 管莹莹
(江苏自动化研究所 连云港 222006)
1 引言
航母编队的防空作战是贯穿于航母编队海上作战一个重要环节。航母作为编队的核心面临日益严重的空中目标威胁,航母周围的防空驱护舰部署直接影响到航母和整个编队的安全。合理部署编队的防空舰对航母编队的区域防空作战有重要的影响,其中航母编队区域防空配置是航母编队进行防空作战部署的基础[1]。航母编队区域防空配置的基本要求为防空舰的舰载防空武器合理地配置使用对航母和编队形成有效的掩护,综合考虑舰空导弹的杀伤区远界、最大航路角、敌完成任务线等影响部署因素,建立防空舰与被保卫舰艇—航母之间配置距离与掩护角模型,并以该模型为基础讨论航母编队区域防空部署达到封锁性和掩护性的防空需求和防空舰的部署范围。
2 模型分析
航母作为航母编队的核心,是编队的首要保卫目标。防空舰作为掩护舰,航母被认为被掩护舰。进行航母编队区域防空部署,首先需要确定掩护舰与被掩护舰之间的配置距离。配置距离的大小影响着掩护舰对航母和整个编队的掩护能力。配置距离与掩护舰的舰载防空导弹的性能、掩护舰对被掩护舰艇形成的掩护角和敌完成任务线有关。为保卫航母编队的安全,应将敌空袭兵器消灭在可能完成任务线之外。敌完成任务线的确定可参考文献[2~3],在此不进行讨论,所以下面的模型均假设已经确定任务线且在足够远的距离上发现目标。在确定掩护舰与被掩护舰的配置距离时,应以掩护舰装备的舰空导弹的性能为基础保证掩护舰完成对被掩护舰的防空掩护任务,并且具有一定的拦截纵深保证舰空导弹对目标的拦截达到规定的次数。
2.1 满足最小拦截纵深的最大有效航路捷径模型
假设来袭目标的速度为Vm,掩护舰的舰载防空导弹系统对目标一次拦截使用n发导弹,连续两发导弹之间的时间间隔为Δtjg,则满足杀伤要求所需要的舰空导弹杀伤区的最小拦截纵深[4~5]为

若共需对目标进行m次拦截,两次拦截之间的火力转移时间为Δtzy,则满足杀伤要求的所需的最小拦截纵深为

设舰空导弹的水平杀伤区远界为Dsy,最大航路角为Qmax,如图1所示已知O1为掩护舰部署点和舰空导弹的水平杀伤区满足最小拦截纵深ΔL,计算舰空导弹满足最小拦截纵深的最大有效航路捷径PYXmax。

2.2 配置距离与掩护角关系模型

图1 最大有效航路捷径计算图
图2 配置距离与掩护角关系图
在三角形OO1A中由余弦定理可得出掩护舰对被掩护舰形成的掩护角2φ的一般计算公式为

根据编队防空要求,防空舰应部署在任务线以内,故防空舰与被保卫舰艇的配置距离Rb的范围为[0,Rt),下面根据计算式(4)讨论掩护角和部署距离之间关系。
情形1:当Dsy≥Rt+ΔL时:

情形2:当Dsy<Rt+ΔL时:
对式(4)按照导数取极值法取极值,令φ′(Rb)=0得:

由于舰空导弹对目标拦截存在最大有效航路捷径,所以目标的航路捷径一定不大于式(3)的最大有效航路捷径,按照导数极值法求得的极值不一定能取到,故计算满足极值法的边界条件。由式(5)得目标的航路捷径P:

需满足P<PYXmax得:

对式(7)取等号解方程得到的正根记作分界点Dfj为


情形2.2:当Dfj>Dsy时:因目标的航路捷径大于最大有效航路捷径,无法同情形2.1按导数取极值法取得极值,按照最大航路角和最大有效航路捷径计算掩护角的最大值和配置距离:



2.3 拦截纵深提前量与目标的进入角关系模型
假设目标来袭的反方向与正北方向的夹角为θ,0≤θ≤φmax,则在该方向上掩护舰对目标的拦截纵深提前量计算式为

显然,Lq在θ=0时取得最大值为Dsy+Rb-Rt-ΔL,随着θ的增大而减小直至等于0。
3 航母编队区域防空部署分析
航母编队区域防空对整个编队的防空效果应具有封锁性和掩护性。航母编队常采用环形部署方式来实现编队360°全方位防空拦截,以达到对整个编队实现封锁防空的目的。防空舰除了对航母编队形成封锁性防空外,还需形成对整个编队的掩护防空。在此以航母编队典型的环形部署方式来讨论航母编队对防空舰的配置需求。首先根据单艘防空舰的最大掩护角计算航母编队封锁防空和掩护防空所需的防空舰的数量,再以防空舰的数量满足航母编队的环形部署要求来讨论防空舰与航母的配置距离的变化范围,即防空舰满足杀伤要求的可部署范围。
3.1 编队环形部署需要防空舰的数量计算
由掩护舰与被掩护舰的配置距离与掩护角模型可知一艘防空舰可提供的最大掩护角为2φmax,故保卫一个编队所需的防空舰的最小数量为

其中[.]为取整运算符号。
3.2 防空舰配置距离可部署的范围计算

图3 编队掩护性防空图
当确定一个编队的防空舰数量满足最小配置要求时,每艘防空舰艇提供的掩护角可以不达到最大值,所以掩护舰与被掩护舰之间的配置距离可在一定的范围内变化。配置距离可部署的范围还与防空舰对编队形成掩护性防空的因素有关,如图3所示。
4 实例分析
假设为某航母编队配备防空舰,航母作为保卫目标,防空舰装备的舰空导弹的水平杀伤区远界Dsy=120km,最大航路角Qmax=75°,两发导弹的时间间隔为Δtjg=2s,两次拦截之间的火力转移时间为Δtzy=18s,拦截目标的平均速度为Vm=1000m/s,上级要求在敌完成任务线Rt=100km外至少对目标进行一次3发导弹,共进行两次拦截,试讨论该编队的防空舰的部署距离范围和环形部署所需的最小配置数量。
首先根据式(2)计算拦截目标所需的最小拦截纵深为ΔL=22km,再判断杀伤区远界与敌完成任务线和拦截纵深关系Dsy=120km<Rt+ΔL=122km,符合配置距离和掩护角计算模型的情形2。由式(8)计算分界点Dfj=67.2km,所以Dfj≤Dsy<Rt+ΔL满足情形2.1,故由式(9)计算配置距离和最大掩护角为Rb=22kmv,2φ=159.2°,由式(11)得:N=3,故航母编队至少需三艘防空舰才能对整个编队形成掩护性防空。当防空舰的部署数量为3时:每艘防空舰需掩护的角度为120°,由式(12)可得防空舰形成掩护性防空时Rb的部署范围为 4.1,)( 54km。
根据已知水平杀伤区远界、敌完成任务线和计算得到的最小拦截纵深,掩护角与配置距离之间关系式(5)化为掩护角与配置距离关系如图4所示。可知配置距离

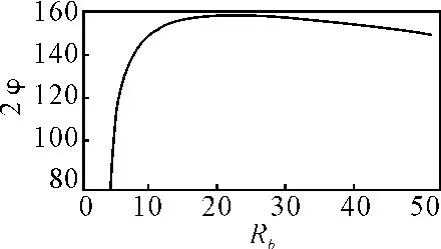
图4 掩护角与配置距离关系图
Rb=22km的时候,掩护角取最大值。在距离范围(4.1,22)随着配置距离的增大,掩护角增大且增大的变化率比较大,即掩护角对配置距离的变化敏感性强;在距离范围(22,54),随着配置距离的增大,掩护角减小且减小的变化率比较小,掩护角对配置距离的变化敏感性减弱,与实际情况是相符的。故航母编队在进行防空作战时,要注意编队防空队形的保持以避免因队形的变化造成防空线漏洞,达不到封锁性和掩护性防空的目的。
当配置距离Rb=22km时,由提前的拦截纵深和目标进入角的关系式(10)可得:

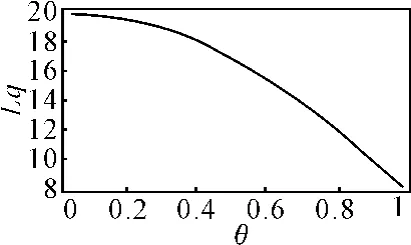
图5 提前的拦截纵深与目标进入角θ关系图
目标进入角θ与该方向上的提前的拦截纵深Lq关系如图5所示。
由图5可知Lq在θ=0时取得最大值为20km,即在该方向上防空舰可提前20km对目标完成拦截任务。随着目标进入角θ的增大该方向上提前的拦截纵深逐渐减小直至等于0,同实际防空拦截是相符的。
5 结语
合理配置航母编队防空队形是航母编队进行防空作战部署的重要环节,科学合理地配置防空舰与航母的间距对于合理使用编队有限的防空兵力形成高效的防空部署态势具有十分重要的意义。本文提出的配置距离和掩护角关系模型综合考虑了最小拦截纵深、舰空导弹的水平杀伤区远界、最大航路角等因素,并以该模型为基础进行了航母编队区域防空部署分析,对航母编队的区域防空部署具有一定的参考价值。该模型对其它舰艇编队的防空部署、要地防空部署等地空导弹部署和指挥决策同样也具有一定的参考意义。当然,高技术条件下航母编队防空作战指挥中与其它多种火力、电子等多种因素有关,实际进行防空作战部署时应考虑作战需求,综合权衡各方因素以实施合理的作战部署,并在编队防空作战实践中不断改进和完善。
[1]徐品高.现代防空对防空体系和防空导弹的需求分析[C]//北京:防空反导体系论文集,2003(6):92-97.
[2]娄寿春.地空导弹射击指挥控制模型[M].北京:国防工业出版社,2009:165-170.
[3]王洁,娄寿春,王颖龙,等.防空导弹混合部署火力单元间配置距离的量化[J].系统工程与电子技术,2006,28(2):263-265.
[4]刘健.地空导弹火力单元配置间距计算方法[J].弹箭与制导学报,2007,27(1):393-395.
[5]朱传伟,王峰,赵国钢.舰空导弹武器系统设计效能计算模型[J].指挥控制与仿真,2006,28(2):74-77,82.
[6]赵建印,刘芳.海上编队双舰防空队形部署优化研究[J].兵工学报,2010,31(6):865-869.
[7]谭安胜,邱延鹏,汪德虎.新型驱护舰编队防空队形配置[J].火力与指挥控制2003,28(6):5-9.
[8]徐品高.防空导弹武器系统的杀伤区、作战区、拦截区和发射区[J].现代防御技术1994,17(1):1-11.
[9]李永刚.舰艇编队对空防御队形优化配置模型[J].情报指挥控制系统与仿真技术,2004,26(4):65-67.
[10]肖支才,程春华.基于改进遗传算法的反舰导弹协同任务规划[J].计算机与数字工程,2010,38(5).
[11]杨娟,罗小明,闵华侨.导弹作战体系作战能力评估方法研究[J].指挥控制与仿真,2009,31(3):1-3,28.
