模拟训练模式下的无人机导引飞行*
2012-06-07李鸿鹏李世诚
石 风 李鸿鹏 李世诚 曾 科
(1.东北电子技术研究所 锦州 121000)(2.第二炮兵驻锦州地区专装代表室 锦州 121000)
1 引言
无人直升机携带光电吊舱在模拟训练中应用越来越广泛,它以其灵活、方便模拟动态光电威胁环境占据越来越重要的位置。光电吊舱通常包括光电探测跟踪模拟器,挂载在无人直升机的腹部,由无人直升机提供电源并进行数据及图像传输。
无人直升机导引飞行就是模拟导弹制导控制,导引和控制无人直升机沿着设定的弹道接近目标。无人机导引飞行是模拟训练过程中重要的一环。
2 模拟训练过程
无人直升机分为无人直升机平台和地面站两部分。地面站安装在在控制车内。光电吊舱包括伺服控制系统和光电探测跟踪模拟器。光电吊舱的操控手柄与控制软件安装在地面控制车内的主控计算机上[1]。
执行模拟训练任务时,合作目标置于地面与控制车保持一定距离。光电吊舱的电视或红外视频图像通过无人直升机的无线通讯设备传回并显示在车内的主控计算机上。操作人员在车内操纵光电吊舱的操控手柄观察视频图像搜索并跟踪目标。图1为模拟训练部署图。
3 导引方法选择及实现

图1 模拟训练效果部署图
常见的导引控制有两种,一种是人在回路的导引控制,即人在控制回路中实时操控光电探测跟踪模拟器的视场角,提供给无人机的飞控计算机进行偏转角度核算,导引无人机调整角度朝向目标飞行。另一种是光电吊舱自主导引控制。本文中采用介绍的是后一种方法[2]。
训练过程中,当无人机飞临目标区上空时便开始搜索目标,并将光电探测跟踪模拟器所拍摄的地面视频图像实时传回地面主控计算机上。地面操作人员时刻注意视频图像,一旦发现目标便通过操纵手柄控制模拟导引头始终对准地面目标[2]。此时光电吊舱锁定目标后,对目标进行持续跟踪并给出导引数据。飞控计算机接收并解算导引数据后利用舵机调整飞行姿态,实现无人机始终按光电探测跟踪模拟器所指方向飞行。实现过程如图2所示。
在此过程中,无人机的位置数据通过数据链路传回地面站,操作人员对无人机的飞行状态进行监控,而无人机的导引控制指令完全由光电吊舱提供。这种导引控制使人从控制者的角色转变为监视者,实现了无人机导引的自主控制[2]。
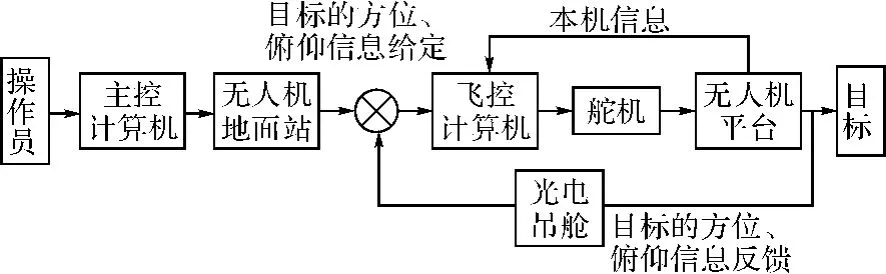
图2导引控制过程框图
3.1 导引方法选择
常见的导引方法有平行接近法、追踪法和比例导引法。本文介绍的是比例导引法。就是使无人直升机跟踪目标时,发现目标线的任何旋转,总是使无人直升机向着减小视线角的方向运动,抑制视线旋转,使无人直升机的相对速度对准目标,力图使无人直升机以直线弹道飞向目标。也就是使无人直升机速度矢量的旋转角速度,与目标视线的旋转角速度成正比。使无人直升机能够敏感地反映目标运动情况,跟踪对付机动目标。
比例导引律是无人直升机速度向量V的转动角速度与目标线的转动角速度成比例,即模型为

为了获得快速反映的精确制导效果,可由控制加速度实现上述导引律,其导引模型分别为

3.2 导引数据的获取
导引飞行所需数据由光电吊舱提供。光电探测跟踪模拟器对锁定的目标借助跟踪波门对目标实施跟踪,当目标偏离波门中心时,产生角偏差信号。偏差信号处理器从电视或红外视频信号中提取出目标位置信息,并输出推动伺服系统的信号不断进行位置调节,使光电探测跟踪模拟器的光轴始终对准目标。同时光电吊舱将处理后的相对于目标的俯仰角和方位角转换为标准的串口信号,提供给无人直升机,形成导引控制指令,使无人直升机调整飞行航向朝着锁定的目标逼近。
导引数据的准确性是必须考虑的。首先光电吊舱的安装零位与无人直升机的机头严格保持一致,这样光电吊舱锁定跟踪目标的方位俯仰信息即为无人直升机相对目标的方位俯仰信息。其次光电吊舱的视轴稳定精度、角速度等设计指标必须满足要求。最后目标跟踪算法上采用相关跟踪,满足不同光电探测跟踪模拟器的昼夜使用的要求。
3.3 导引的实现
导引功能作为一个独立的模态,与远航、返航等一样在地面控制台设置一个导引按键,在远航状态下,等待导引指令是否捕捉到目标。没有捕捉到目标时,可以在远航状态下,调整无人直升机的机头指向。捕捉到目标时,不做调整,等待导引指令是否有效,无效不能按导引按键。导引指令有效时,按下导引按键。进入导引飞行模态,当无人直升机纵向速度方向相对于目标视线的夹角小(距离目标较远)时,采用以一定的速度前飞,无人直升机纵向速度方向与目标视线的夹角为常数;当大于这个常数时,通过增加下降速度的方法调整,下降速度最大不能超过无人机的最小速度值;当小于这个常数时,通过增加上升速度的方法调整,上升速度最大不能大于无人机的最小速度值[3]。
当无人直升机纵向速度方向相对于目标视线的夹角大于一定阈值(距离目标近)时,再采用无人直升机纵向速度方向与目标视线的夹角为零的导引方法,通过将下降速度固定为无人机的最小速度值,降低前飞速度的方法来实现。前飞最低速度为无人机的最小速度值。
导引过程中,如果出现导引指令无效的情况,则保持平飞状态。当导引指令有效,则继续导引模式。在导引飞行过程中,可用远航指令随时解除导引飞行。
在导引过程开始时,无人直升机机头指向原本与光电探测跟踪模拟器视场中锁定目标成一定角度,导引过程中无人机机头指向慢慢调转到视场中锁定的目标方向。整个导引过程中,无人直升机飞行速度平稳。
4 结语
模拟训练结果表明采用比例导引法实施导引具备可行性。可通过提高光电探测跟踪模拟器的性能、目标跟踪算法和飞控软件的控制算法三个方面大大提高导引飞行的准确性。
[1]黎志强,许兆林,徐景硕.机载光电跟踪平台的控制系统设计[J].电光与控制,2009,16(11).
[2]孔韬,魏瑞轩,刘月.自主攻击型无人机的导引技术研究[J].飞行力学,2009,27(4).
[3]赵东,蔡海超,赵海涛.导弹中末端制导导引律研究[J].舰船电子工程,2010,30(5).
[4]丁团结,方威,王锋.无人机遥控驾驶关键技术研究与飞行品质分析[J].飞行力学,2011(2).
[5]刘尚民,赵磊.电传飞机模型自由飞试验飞行控制技术研究[J].飞行力学,2012(1).
[6]尹亮亮,黄一敏.无人直升机高精度位置控制[J].飞行力学,2012(4).
[7]徐存东,何流.基于ARM9的近程无人机飞行控制计算机的研究[J].计算机测量与控制,2011(10).
[8]宋飞飞.无人机数据链信道编码方法研究[J].计算机测量与控制,2012(6).
