平面近场测量中有探头补偿的坐标系之间的变换
2012-06-05陈玉林房善玺
陈玉林 房善玺
(华东电子工程研究所 合肥 230031)
1 引言
在实际运用中,当天线的测量方法改变时,需要用不同的坐标系。为了准确的描述天线方向图的各种参数,需要对坐标系进行精确的定义,并进行相互变换。文献[1]和[2]对常用三种坐标系进行了定义,但只给出了简单的坐标变换关系。本文在此基础上,结合有探头补偿的近远场变换,给出了具体的远场坐标系之间的变换,为构建近场测量系统打下了理论基础。
2 常用三种球坐标系简介及相互变换关系
天线测试中,常用到的三种坐标系为(θ,φ)球坐标系,AZ/EL球坐标系和EL/AZ球坐标系。其具体形式分别见图1、2、3。其中,(θ,φ)球坐标系以 z轴为极轴,可通过在方位转台上安装横滚转台得到。AZ/EL球坐标系以y轴为极轴,可通过下俯仰上方位的转台得到。EL/AZ球坐标系以x轴为极轴,可通过下方位上俯仰的转台得到。
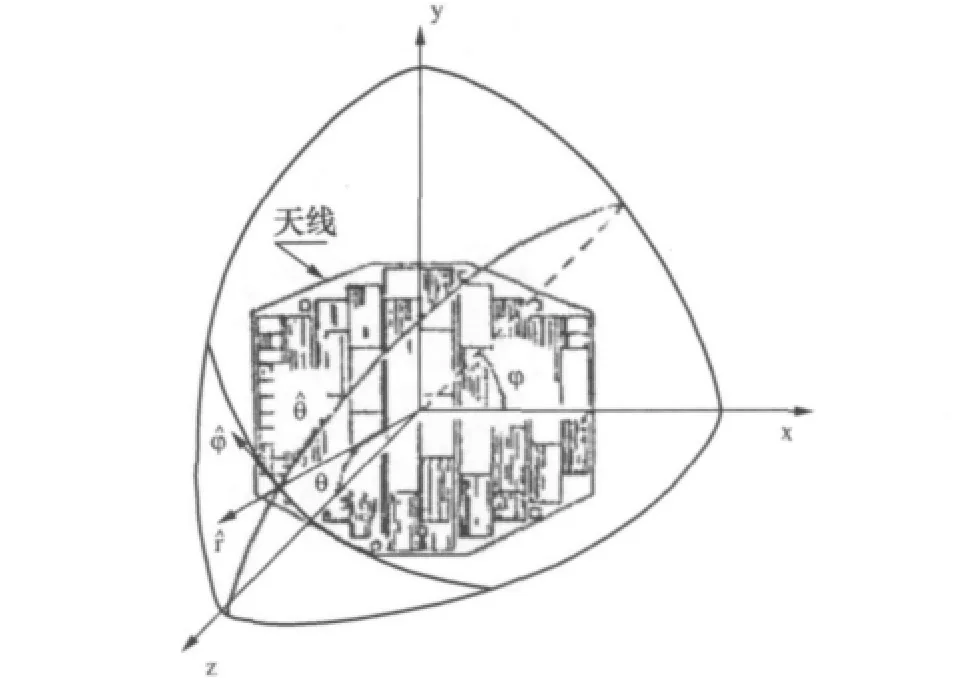
图1(θ,φ)球坐标系

三种球坐标系之间的角度转换关系如下:
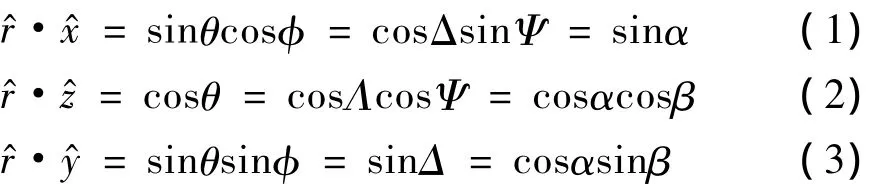
则从(Ψ,Δ)变换到(θ,φ)的关系为:

以此类推,其它角度之间变换关系也可由式(1)~式(3)推导出来。
3 带探头补偿近远场变换中远场公式的不同坐标系表达式
近场测量中,先采得一组近场数据然后根据近远场变换理论得到远场方向图。设采样间距分别为dx,dy,采样距离为d。则根据近远场变换理论得到(θ,φ)坐标系下,远场方向图的表达式如下:

式中,a和b分别为开口波导的宽边尺寸和窄边尺寸,λ为工作波长。

此处略去常数因子,而

b'0(x,y,d)和b″0(x,y,d)分别为探头在0°和90°方向采得的近场数据。

实际测量中,探头只需测一次主极化分量即可。根据Ludwig对交叉极化的定义可得到方向图的简化式。天线为水平线极化时,远场主极化方向图为:

天线为垂直线极化时,远场主极化方向图为:

根据式(1)~(3)的变换关系同理得到AZ/EL坐标系中远场方向图的表达式如下。
天线为水平线极化时,远场主极化方向图为:

天线为垂直线极化时,远场主极化方向图为:
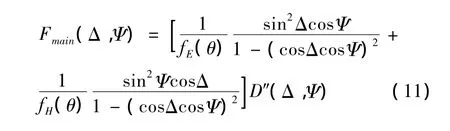
其中,fE(θ)和 fH(θ)中的 θ由 cosθ=cosΔcosΨ确定。
同理,对于EL/AZ球坐标系,当天线为水平线极化时,远场主极化方向图为:

4 结果验证
为了验证推导的正确性和有效性,在微波暗室对一频率为x波段的抛物面天线进行了实测。扫描面的采样点数为262×262,采样间隔 Δx=Δy=0.45λ,天线到探头的距离d=3λ。实际测得结果与近远场变换后结果比较见图4~6。限于篇幅,本文只给出了水平面幅度方向图的比较结果。

图4 (θ,φ)球坐标系方向图比较

从上面可以看出,通过近远场变换计算的不同球坐标系下的方向图与实测结果基本一致,从而证实了本推导公式的正确性。
5 结论
本文绍了测试中常用的三种球坐标系,并针对有探头补偿的近远场变换算法,给出了完整的不同球坐标下的远场公式。最后,数值模拟了某x波段抛物面天线的近场测试,并通过实验测试,验证了结果的正确性,有效性和工程应用价值。
[1]A.G.Repjar.A.C.Newell.Accurate determination of planar near-filed correction parameters for linearly polarized probes[J].IEEE Trans.on Antennas and Propagation,1988,36(6):855-868.
[2]D.T.Paris.Basic theory of probe-compensated near-field measurement[J].IEEE Trans.on Antennas and Propagation,1978,26:373 ~379.
[3]Allen.C.Newell.Planar near-field antenna measurement.March 1994.
[4]邵江达,李浚沛.探头修正用坐标变换[J].现代雷达,1999,6:82 -89.
