单电磁铁悬浮系统的指数趋近律滑模控制
2012-06-02宋荣荣
宋荣荣
(1.西南交通大学电气工程学院,成都 610031;2.西南民族大学计算机科学与技术学院,成都 610041)
磁浮控制技术能够使悬浮物与支承面实现无接触悬浮,具有无摩擦、噪声低、污染小等优点,因而被广泛应用在磁悬浮轴承、磁悬浮工作台、磁悬浮隔振器,特别是磁悬浮列车上,这使得该技术受到国内外专家和学者的广泛关注[1]。一般来说,磁浮控制方法主要包括线性控制[2]和非线性控制[3]。目前,很多国内外专家学者对磁浮系统的滑模控制产生了浓厚的兴趣[4]。
线性控制主要是通过将系统在平衡点的邻域内采用泰勒定理展开,用近似的线性结构代替非线性结构进行悬浮控制。Matsuda R[5]研究了多电磁铁悬浮系统的线性化问题,并设计了一种反馈控制器。由于轨道具有不平顺的随机性,Hac A[6]设计了一种预见控制器,该控制器对线性悬浮系统的运行平稳性、外干扰和工作状态具有良好的预见性。Trumper D L[7]提出了一种系统线性化的方法,利用线性和非线性2种控制器对系统进行仿真比较。为了实现故障检测,在传统Luenberger观测器的基础上,Koseki T[8]对系统的线性化模型提出了一种Luenberger鲁棒故障检测观测器的设计方法以及相应的故障检测算法,并给出了在外干扰存在的情况下,实现鲁棒故障检测观测器设计的充分必要条件。然而,这些控制方法只能使系统在平衡点附近具有良好的性质,在远离平衡点处,系统将处于不稳定状态。
磁浮系统是一种典型的非线性、不确定性开环系统。传统的控制方法无法解决非线性部分的控制问题,所以目前国际上有很多专家学者都在研究悬浮系统的非线性控制方法,例如H∞鲁棒控制、数控技术、状态最优估计控制、神经网络控制、模糊控制等,这些控制方法对于解决磁浮系统的非线性和不确定性有着良好的效果[9-13]。
在众多的控制方法中,滑模控制对内部参数的变动和外部扰动具有完全的自适应性,这一优点已引起专家学者的极大兴趣,使其得到巨大发展和广泛应用。多年以来,许多学者将这项技术应用到悬浮控制技术中。针对3种模式下的静电悬浮系统,Yang W Q等[14]设计了滑模控制器,仿真研究表明,该控制器提供了一个保证系统良好性能的预载荷。对于悬浮系统,Mohan B[15]结合最优控制和自适应控制算法设计了一个滑模控制器,该控制器能够保证系统在外干扰和系统参数发生改变时保持良好的性能,但是不能有效消除抖振现象。抖振问题的确是滑模控制的一个缺点,这成为影响滑模控制发展的主要原因。对于一个带有积分结构的线性系统,杨普等[16]采用指数趋近律设计了滑模控制器,给出了抖振幅度、周期和趋近律参数、控制量的变化率之间的定量关系,从而有效地控制系统的抖振问题。基于以上文献,本文将滑模控制技术应用到单电磁铁的悬浮控制中,并采用指数趋近律有效地解决了该系统的抖振问题。
本文先给出磁场力的一种非线性结构,通过控制电流,将该系统转化为二阶非线性系统。然后,根据系统的状态方程,设计了一个具有防抖振现象的动态滑模控制器。最后,基于Matlab软件进行了仿真。结果表明,该控制系统具有良好的动态性能和较强的鲁棒性。
1 单电磁铁悬浮系统的状态方程
在单电磁铁悬浮系统中,磁铁悬浮在电压控制的磁场中,所以系统可以通过控制器控制电流,从而控制电压,使磁铁悬浮在设定的平衡点处。系统结构如图1所示。

图1 单电磁铁悬浮系统结构
图1中:φT为主极磁通;φm为气隙磁通;φL为漏磁通;Mg为电磁铁重力;fd为外界干扰力;F(i,c)为电磁吸力;z(t)为磁极表面与参考平面的距离;h(t)为导轨表面参考平面的距离;c(t)为磁极与导轨间的气隙;i(t)为控制线圈的电流;u(t)为绕组回路的电压。
在分析单电磁铁悬浮系统的动力学模型时,假设[17]:
① 忽略漏磁通 φL,即 φm=φT。
②电磁铁磁路中铁磁材料的磁导率无穷大(忽略铁芯和导轨中的磁阻),磁势均匀降落在气隙上。
③电磁铁仅有垂直方向上的移动,其他方向受限,无运动。
设电磁铁悬浮位置为c,控制电流为i,两者之间的关系如表1。
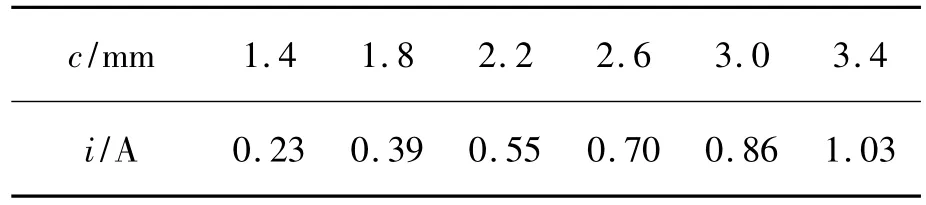
表1 c与i的关系
电磁铁受到的磁场力F与c和i有关,可用下式表示:

式中a2、a1、a0为待定系数。利用最小二乘法拟合曲线,由 表 1 可 得 a2=0.019 5,a1=-0.182 7,a0=0.133 8。
根据电磁场理论,系统的数学模型为

选取系统状态变量为x1(t)=c(t),x2(t)=,那么单电磁铁悬浮系统的状态空间方程为

设 x0=(x10,x20)=(x10,0)为系统在平衡点处的状态值,系统输出y=x1-x10,由式(1)可得输入输出关系¨y=a+f(x)·i2(t)。这样,就建立了单电磁铁悬浮系统的状态方程。
2 滑模控制器
滑模控制不是一种分析方法,而是一种综合方法,因此,其重点就是系统的设计问题[22]。
设计问题有2个:① 选择切换函数 s(x);②求取控制u±(x)。设计的目标有3个,即滑模控制的三要素:进入条件;存在条件;稳定条件。

可得系统在滑模区的等效控制

将ieq代人系统表达式(1),可得滑模运动方程

那么,等效的滑模运动方程可写为

其中参数c1、c2满足 Hurwitz多项式 p(s)=s2+c1s+c2的要求,这样就可使得滑模运动渐近稳定。
利用式(1),可以将切换函数改写为s=a+fi2+c1x2+c2(x1-x10)。采用指数趋近律-w*sign(s)-Ks的控制策略,则得控制电流:

当切换函数s趋近于零时,输出y=x1-x10可以通过方程得到。因为参数c1、c2满足Hurwitz多项式p(s)=s2+c1s+c2的要求,所以输出y趋近于零,这样x2也将趋近于零。通过滑模控制,就可以保证系统中的单电磁铁到达期望的位置。
3 Matlab仿真分析
对于单电磁铁悬浮系统,选择参数为:采样周期为0.01 s,重力加速度g=9.8 m/s2,电磁铁质量m=98.4 g,气隙的初始位置x10=3.2 mm。滑模控制器参数为:w=5 000,c1=61,c2=930,K=10 000。对上面的模型用 Matlab进行仿真[19],仿真结果如图2所示。

图2 滑模控制的气隙响应曲线
由图2可知,对于磁悬浮系统,基于指数趋近律的滑模控制器的输出响应过渡过程很短,能够快速到达期望位置,滑模控制器的输出电流约为0.93,验证了控制器的准确性。
为检验采用滑模控制后系统的鲁棒性,作如下仿真分析:
1)设系统参数发生改变,电磁铁质量m=50 g,气隙的初始位置x10=4.2 mm,气隙变化如图3所示。

图3 内部参数发生改变后的气隙响应曲线
由图3可知,系统在滑模控制器的控制作用下,不受内部参数改变的影响,仍保持良好的动态特性。
2)假设外干扰力fd增大为电磁铁质量的3倍时,气隙变化如图4所示。

图4 外干扰力fd增大为电磁铁质量3倍时的气隙响应曲线
3)当轨道振动变化大小为1 mm时,不同频率对系统气隙变化的影响情况如图5所示。

图5 不同频率对气隙响应曲线的影响
仿真结果表明,当轨道变化频率为1 Hz时,气隙响应曲线变化幅值约为0.001 mm;当轨道变化频率为50 Hz时,气隙响应曲线变化幅值约为0.004 mm。
4)采用等速趋近律˙s=-w*sign(s)进行仿真比较,系统的气隙响应曲线出现明显的抖振现象,如图6所示。
从仿真结果可以看出:图6(a)表明基于等速趋近律的滑模控制器的仿真曲线中很明显存在着一些抖振现象;而图6(b)表明基于指数趋近律的滑模控制器的仿真曲线减弱了系统的抖振现象,说明该控制器能够有效地解决系统的抖振问题。

图6 两种不同趋近律的气隙响应曲线
4 结论
1)分析了传统滑模控制器必须考虑的问题:到达条件,滑模面存在条件,滑模面的设计,稳定性条件。针对单电磁铁悬浮系统进行了改进的滑模控制器设计,即采用指数趋近律设计滑模控制器,在采样周期为0.01 s的情况下,该系统在滑模控制器的作用下能够较快收敛到期望的稳定位置,并保持稳定性。这说明该控制器具有较快的收敛性。
2)对于周期性的高频和低频干扰或是脉冲干扰,基于指数趋近律的滑模控制器都表现了很好的鲁棒性,不仅响应时间短,而且气隙响应曲线几乎没有出现抖振现象。总之,该系统对内部参数变化和外部干扰具有较强的鲁棒性。
3)对滑模控制方法中存在的抖振现象进行了仔细分析,并采用了2种控制率对该系统进行了仿真比较。当采用等速趋近律设计滑模控制器时,该系统很明显出现较强的抖振现象。与之相比,采用指数趋近律的控制器能够有效地防止抖振现象。
4)一个理论必须在实践中得到成功的应用才能推动其不断完善和向前发展,滑模控制理论也是一样,今后应该更多考虑如何将其和其他的非线性控制方法结合,更好地应用到磁悬浮控制中去。
[1]吴祥明.磁浮列车[M].上海:上海科学技术出版社,2003:15-30.
[2]Trumper D L,Olson S M,Subrahmanyan P K.Linearing control of magnetic suspension systems[J].Control Systems Technology,1997,5:427 -438.
[3]Alleyne A,Hedrick J K.Nonlinear adaptive control of active suspendsions[J].Control Systems Technology,1995,3:94 -101.
[4]Shiuh-Jer Huang,Wei-Cheng Lin.Adaptive fuzzy controller with sliding surface for vehicle suspension control[J].Fuzzy Systems,2003,11:550 -559.
[5]Matsuda R,Nakagawa M,Yamada I.Multi input-output control of magnetically suspended linear guide[J].Magnetics,1984,20(5):1690 -1692.
[6]Hac A.Optimal linear preview control of active vehicle suspension[C]//Decision and Control 1990,Proceedings of the 29thIEEE Conference on.[S.l.]:[s.n.],1990:2779-2784.
[7]Trumper D L,Olson S M.Subrahmanyan P K.Linearizing Control of Magnetic Suspension[J].Systems,control systems technology,1997,5(4):427 -438.
[8]Jiangheng Liu,Koseki T.3 degrees of freedom control of semi-zero-power magnetic levitation suitable for two-dimensional linear motor[C]//Electrical Machines and Systems 2001 Conference.[S.l]:[s.n.],2001:976-981.
[9]Sammier D,Dugard L.H∞control of active vehicle suspensions[C]//Control Applications,2000.Proceedings of the 2000 IEEE International Conference on.[S.l]:[s.n.],2000:976 -981.
[10]盛蓉蓉.悬浮控制方法的研究与数字实现[D].成都:西南交通大学,2006.
[11]Selamat H,Alimin A J,Zawawi M A.Optimal control of railway vehicle system.Industrial Technology[C]//ICIT2009,IEEE International Conference on.[S.l]:[s.n.],2009:1 -6.
[12]Jing Xu,Juntao Fei.Neural network predictive control of vehicle suspension[C]//Information Science and Engineering(ICISE),2010 2ndInternational Conference on.[S.l]:[s.n.],2010:1319 -1322.
[13]Chuanyin Tang,Guangyao Zhao,Wei Zhou,et al.Research on suspension system based on fuzzy logic control[C]//Advanced Computer Control(ICACC),2010 2ndInternational Conference on.[S.l]:[s.n.],2010:5-8.
[14]Yang W Q,Zhang Y S.Electrostatic suspension system with sliding mode control[J].Aerospace and Electronic Systems,1992,28:605 -609.
[15]Mohan B,Phadke S B.Variable structure active suspension system[C]//Industrial Electronics,Control,and Instrumentation,Proceedings of the 1996 IEEE IECON 22nd International Conference on.[S.l]:[s.n.],1996:1945-1948.
[16]杨普,张曾科.一类滑模变结构控制系统的抖振控制[J].清华大学学报,2005,45(1):93 -95.
[17]谢云德,常文森.电磁型(EMS)磁悬浮列车系统铅垂方向的建模与仿真[J].铁道学报,1996(4):47-54.
[18]王丰尧.滑模变结构控制[M].北京:机械工业出版社,2001:5-20.
[19]张智星.Matlab程序设计与应用[M].北京:清华大学出版社,2002:360-365.
