水中高速小目标被动检测模型及其应用
2012-05-28郝保安杨云川
胡 桥, 郝保安, 易 红, 杨云川
水中高速小目标被动检测模型及其应用
胡 桥1,2, 郝保安1,2, 易 红2, 杨云川1,2
(1. 水下信息与控制重点实验室, 陕西 西安, 710075; 2. 中国船舶重工集团公司第705研究所, 陕西 西安, 710075)
针对水中高速小目标难以准确检测的问题, 结合3D超波束形成(3D-HBF)方法具有灵活控制窄波束和低旁瓣的特性, 以及模糊支持向量数据描述(FSVDD)检测器具有优良的目标检测性能这两者的优势, 构建了水中高速小目标被动检测模型和具体实施方法。在该方法中, 高速小目标的辐射噪声信号经过3D-HBF后, 将获得的波束响应输出向量输入到FSVDD检测器中, 从而实现目标的自动检测和测向。将该方法应用于水下高速小目标检测的实航试验中, 结果表明, 同基于常规波束形成的检测器相比, 其具有更好的检测性能、目标检测准确率和较高的方位估计精度。
水中高速小目标; 被动检测; 超波束形成; 支持向量数据描述
0 引言
新型鱼雷正向着高航速、远航程、大深度、低噪声、精确打击、高效毁伤和智能化等方面快速发展, 并已成为大型水面舰艇、潜艇的最大威胁之一。同时, 鱼雷的反对抗能力也进一步提高, 即使鱼雷被软杀伤防御系统成功诱骗后, 它的强续航力使它仍然具有再次搜索目标、攻击目标的能力。而且随着电子技术的飞速发展和信号处理能力的不断加强, 现有鱼雷可以在系统的硬件和软件方面加以升级, 从而大大提高现代鱼雷的反对抗能力, 尤其是对抗软杀伤防御系统的能力[1]。
目前, 国内现有的鱼雷防御系统都是软杀伤, 既不能有效地对抗各种智能化鱼雷, 也不能避开高速鱼雷的再次攻击。为了保护本舰和潜艇, 提高它们对鱼雷攻击的防御能力, 研制硬杀伤鱼雷防御系统势在必行。硬杀伤防御系统是指在鱼雷被诱骗成功时或者还没有识别出防御系统之前, 本方必须快速、准确地探测到高速的来袭鱼雷, 并对其加以拦截和毁伤, 以达到一劳永逸的目的。因此, 在硬杀伤防御系统中准确探测和识别出鱼雷等高速小目标变得极为重要, 否者将伤及本舰或潜艇。一方面由于鱼雷的目标强度小, 给硬杀伤防御系统的主动探测带来了困难; 另一方面, 为了加强硬杀伤防御系统隐蔽攻击性能、降低对方预警时间、实现攻击的突然性, 对高速来袭鱼雷进行被动探测是一条有效的途径。因此开展水中高速小目标被动探测理论研究具有重要军事价值和现实意义。
超波束形成(Hyper beamforming)是阵列信号处理领域内能同时进行波束锐化和旁瓣抑制的新技术[1-3], 它的基本思想是, 通过形成指向同一方向的分裂波束对, 获得和波束与差分波后进行相减, 同时进行超指数计算。该算法在实现过程中能够保持已有声学基阵系统不变, 在不增加额外硬件的条件下, 通过探测系统的软件升级以达到减小束宽、抑制旁瓣和栅瓣, 同时提高定向精度的目的。
模糊支持向量数据描述法(fuzzy support vec- tor data description, FSVDD)仅仅依靠海洋环境背景下的噪声数据样本, 就可以建立起单值目标检测器, 从而对水声目标进行智能检测[4]。它不仅可以将目标与背景噪声明显地区分出来, 而且随着目标辐射噪声信号信噪比的变化, 能够快速将目标强度的发展趋势清晰显示出来[5-7]。
根据上述讨论, 将超波束形成技术和模糊支持向量数据描述算法相结合, 提出了适用于水中高速小目标被动检测的理论模型。并结合对水下高速小目标检测的工程实例分析, 验证了该模型的有效性。
1 3D超波束形成的基本原理
1.1 分裂波束形成技术

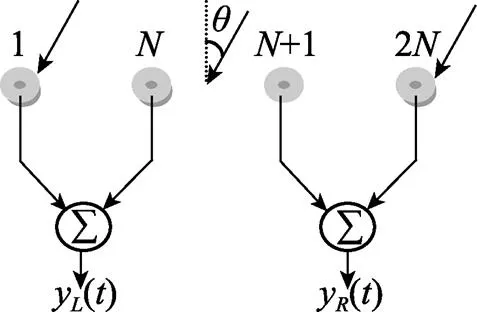
图1 线列阵的分裂波束形成示意图

1.2 基于分裂波束的超波束技术原理
从式(1)可以得到左右2个半波束的和波束y与差波束y分别为

为不失一般性, 以10阵元的等间隔线列阵为例, 设入射角=0°, 左右各5个阵元形成的半波束和差波束的指向性如图2(a)所示。可以看出, 当预成波束方向偏离目标方位时, 差波束响应幅值增大, 半波束响应幅值减小。
根据差波束在信号入射方向的优良特性, 结合和波束(传统波束)可构造超波束

和波束与超波束指向性如图2(b)所示。从式(3)和图2中可以看出, 当预成波束方向和信号入射方向相同时, 左右2个子阵的波束响应幅值相同; 当入射方向和预成方向偏离较大时, 和波束响应幅值减小, 差波束响应幅值增大, 从而使得超波束的输出得到锐化。
定义广义的超波束形成公式为

式中:为超指数;和分别为形成和波束的左右2个半波束的权重系数(限定+=2), 通过调整权重系数可以改变左右2个半波束的均衡性。
图2 10元等间隔线列阵的波束指向性
Fig. 2 Directional patterns in the 10-element linear array with equal distance
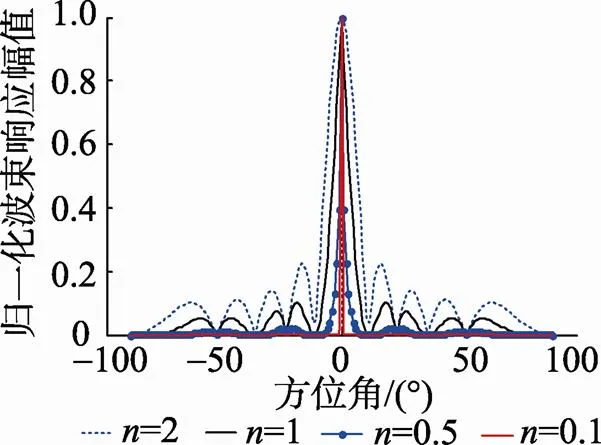
图3 束宽特性与超指数的关系图

表1 束宽、主/旁瓣比与超指数的关系
从表3和图1中可以看出, 随着超指数的减小, 超波束束宽和旁瓣都将逐步下降。此外, 通过选择合适的超指数还能满足设定的束宽要求。
1.3 3D超波束形成原理
上面讨论的都是基于线列阵的情况, 实际水声探测工程中应用较多的都是平面阵。下面将超波束形成从线列阵扩展成基于平面阵的3D超波束形成。通常可以将平面阵非常左、右和上、下4个部分。根据式(4), 左、右两部分形成的超波束Hyp_LR和上、下两部分形成的超波束Hyp_UD分别为
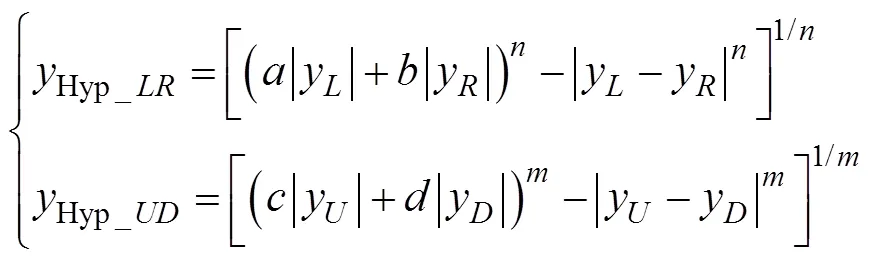
由基阵乘积定理可知,Hyp_LR和Hyp_UD构成的平面阵形成的3D超波束为

对于由2个垂直的10元线列阵构成的平面阵, 常规波束形成和超波束形成的3D波束如图4所示。

图4 常规波束形成与3D超波束形成的性能比较
从图4中可以看出, 相比3D常规波束的输出响应, 3D超波束的主瓣宽度得到了极大的降低, 同时旁瓣也得到了有效的抑制。因此, 基于平面阵的被动探测系统中采用3D超波束形成方法, 一方面可以提高系统的检测性能, 另一方面可以降低虚警概率, 并提升目标方位的估计性能。
2 模糊支持向量数据描述
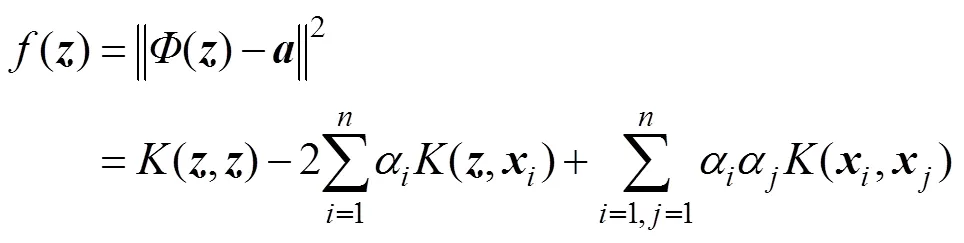
2.1 支持向量数据描述
如图5所示, 支持向量数据描述(support vector data description , SVDD)的基本思想是把要描述的对象(背景噪声样本)作为一个整体, 建立一个封闭而紧凑的区域W(半径为的超球体), 使被描述的对象全部或尽可能多的包容在W内, 而非该类对象(目标样本)不包含或尽可能少的包含在W内。

图5 支持向量数据描述示意图


2.2 模糊支持向量数据描述
为了描述水声信号数据样本的重要程度或所属类别的不确定性, 即模糊性, 为数据样本引入模糊隶属度系数s, 0≤s≤1。s越大, 说明越重要, 在检测中所占的权重就越大;s也可以反映样本属于水声目标样本的隶属程度,s越大, 说明属于水声目标样本的程度越大。利用模糊系数s, 可将标准的SVDD扩展为FSVDD。下面研究FSVDD的基本原理和算法。


对比式(10)和式(8)可以看出, 当s=0时, 两式的表达式相同, 即SVDD是FSVDD的一种特殊形式。
3 水中高速小目标被动检测模型

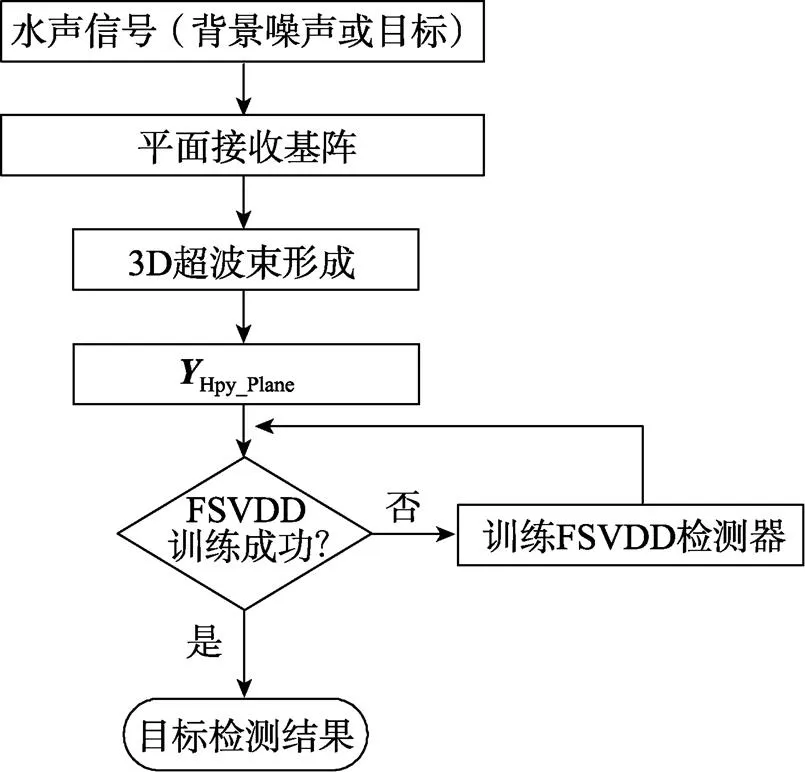
图6 水中高速小目标被动检测模型
4 应用实例分析
在某次实航试验中, 用装置了平面接收基阵的水下运动载体对来袭的水下高速小目标进行检测, 从而对本文提出的高速小目标被动检测模型进行验证。
在该试验中, 对于水声环境的背景噪声, 常规波束形成和3D超波束形成的响应输出如图7(a)所示, 它们对目标辐射噪声的响应输出如图7(b)所示。可以看出, 对于背景噪声和目标辐射噪声, 3D超波束形成的响应输出能量均小于常规波束形成的响应输出能量, 这说明在同一基阵硬件条件下, 由于3D超波束能得到更窄的主瓣和更低的旁瓣, 从而可对空间噪声进行有效地抑制, 获得较少的噪声能量。3D超波束形成在目标辐射噪声时的响应输出能量比背景噪声时的高4.8 dB, 而常规波束形成的响应输出能量基本上没有变化, 这说明3D超波束对目标出现的情况更为敏感。
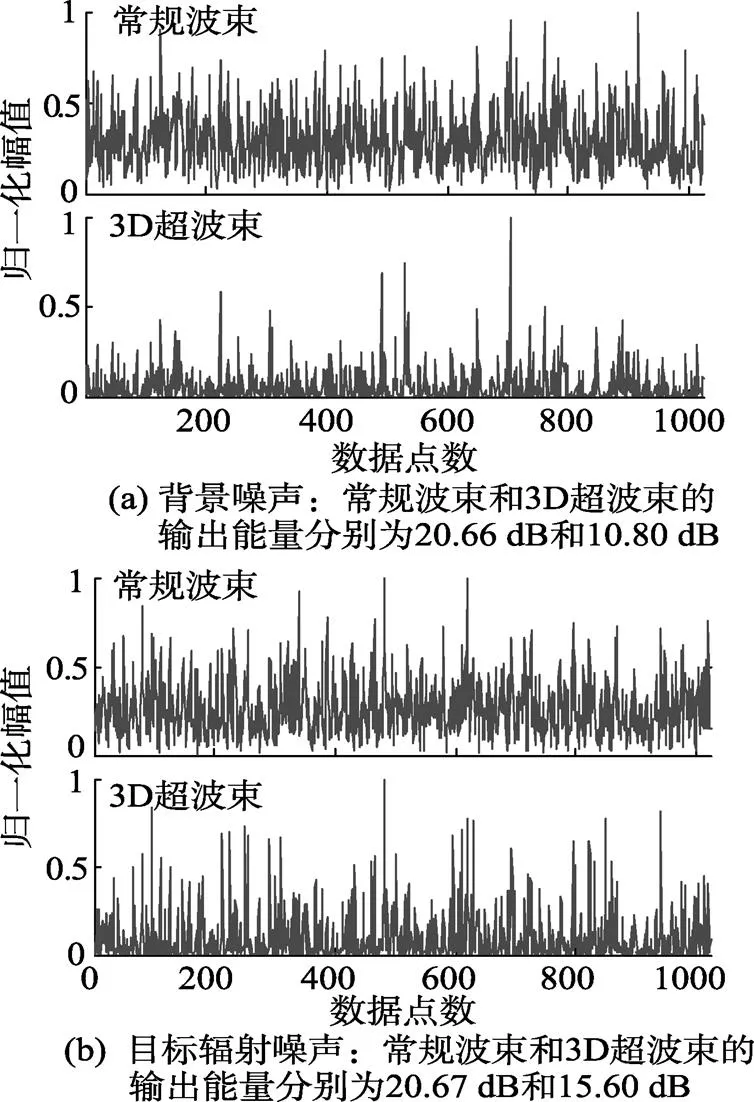
图7 水中背景和高速小目标辐射噪声的波束响应输出

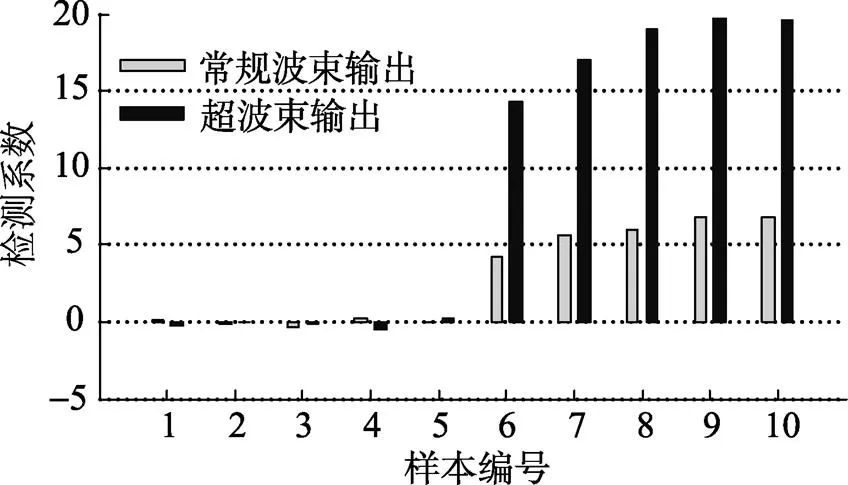
图8 水中高速小目标被动检测结果
对于编号为6~10的5个目标辐射噪声数据样本, 基于常规波束和基于3D超波束的被动检测模型都能将目标检测出来。此外还可以看出, 一方面, 基于3D超波束的检测模型对应的检测系数都大于基于常规波束的检测系数, 目标与背景噪声的可分性更强; 另一方面, 基于3D超波束的检测模型还可以将目标的强度变化情况清晰地显示出来, 与探测系统和高速小目标的距离逐渐接近的实际情况相符。
在不同方向的波束检测值的相对变化量如图9所示, 横坐标为被动检测波束方向, 纵坐标为基于常规波束和3D超波束的检测值分别归一化后的相对变化量。由图可见, 基于3D超波束的检测值变化量大于基于常规波束的变化量, 各不同方向被动检测波束之间检测值的差异相对也较明显; 在0°附近, 基于3D超波束的波束检测值最大, 这与试验中探测系统的运动载体相对于水下高速小目标的实际位置一致。这也说明了基于超波束的高速小目标被动检测模型具有较好的目标定向性能。

图9 常规波束和3D超波束在不同方向的波束检测值
5 结论
本文将3D超波束形成技术和基于模糊支持向量数据描述的单值目标检测器进行有机结合, 构建了一种水中高速小目标被动检测的理论模型, 并提出了具体的实施方法。将该方法应用于水下高速小目标检测的实航试验中, 得到以下结论。
1) 3D超波束形成技术在工程应用中能够保持已有声学基阵系统不变, 在不增加额外硬件的条件下, 通过常规探测系统的软件升级以达到减小主瓣束宽和抑制旁瓣的目的, 而且计算量小, 简单易行。
2) 水中高速小目标被动检测的模型能够有效地减少空间噪声的输入, 能够有效地提高系统的检测性能, 降低虚警概率, 并且提高探测系统对目标方位的估计性能。
[1] Schlieter H, Eigenbrod H. Method for the Formation of Radiated Beams in Direction Finder Systems[P]. United States Patent: US 6021096.
[2] Schlieter H. Passive Sonar Detection Improvement by HyperbeamTM Technique[C]//UDT, Europe 2006, Hamburg, Germany, 2006: 7A-2.
[3] Schlieter H. 3D-Hyperbeam Patent[P]. United States Patent: US 6178140B1.
[4] 胡桥. 水中目标新型被动检测理论及方法研究[D]. 西安: 中国船舶重工集团公司第705研究所, 2008.
Hu Qiao. Research on New Passive Detecting Theories and Methods for Underwater Targets[D]. Xi′an: The 705 Research Institute, 2008.
[5] Hu Q, Hao B A, Lü L X, et al. Hybrid Intelligent Detection for Underwater Acoustic Target Using EMD, Feature Distance Evaluation Technique and FSVDD[C]// 2008 International Congress on Image and Signal Processing , IEEE, 2008, 5(4): 54-58.
[6] 胡桥, 郝保安, 吕林夏, 等. 一种新的水声目标智能检测模型[J]. 系统仿真学报, 2009, 21(8): 2369-2372.
Hu Qiao, Hao Bao-an, Lü Lin-xia, et al. New Intelligent Target-Dete- ction Model for Underwater Acoustic Signals[J]. Journal of System Simulation, 2009, 21(8): 2369- 2372.
[7] 胡桥, 何正嘉, 訾艳阳,等. 基于模糊支持矢量数据描述的早期故障智能监测诊断[J]. 机械工程学报, 2005, 41(12): 145-150.
Hu Qiao, He Zheng-jia, Zi Yan-yang, et al. Incipient Fault Intelligent Monitoring and Diagnosis Based on Fuzzy Support Vector Data Description[J]. Chinese Journal of Mechanical Engineering, 2005, 41(12): 145- 150.
Passive Detection Model for Underwater High-speed Small Targets with Application
HU Qiao1,2, HAO Bao-an1,2, YI Hong2, YANG Yun-chuan1,2
(1. Science and Technology on Underwater Information and Control Laboratory, Xi′an 710075, China; 2. The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
For accurately detecting underwater high-speed small targets, a novel passive detection model is proposed based on the three-dimensional hyper beam forming (3D-HBF)method with flexible control of beam width and side lobe, and the fuzzy support vector data description (FSVDD) detector with excellent target detection capability. And its implementation method is also discussed. In the scheme, 3D-HBF is carried out to obtain the beam response vectors (BSV) from original underwater acoustic signals, and then the BSV are input to the FSVDD detector to detect and orient the underwater targets intelligently. The application of the proposed model to target detection of underwater high-speed small targets in sea trial demonstrates its better detection performance and higher detection success rate and localization accuracy, compared with the conventional beam forming based detection method.
underwater high-speed small target; passive detection; hyper beam forming; support vector data description(SVDD)
TJ630.34; TN911.7
A
1673-1948(2012)04-0261-06
2011-05-23;
2011-08-23.
陕西省科学技术研究发展计划(2010KJXX-09).
胡 桥(1977-), 男, 博士后, 高工, 研究方向为现代信号处理、水声目标检测及智能识别、系统工程.
(责任编辑: 杨力军)
