基于脉振高频电压注入的对转永磁同步电机无位置传感器控制
2012-05-28徐海珠谢顺依崔维开王松林
徐海珠, 谢顺依, 崔维开, 王松林
基于脉振高频电压注入的对转永磁同步电机无位置传感器控制
徐海珠1, 谢顺依1, 崔维开2, 王松林1
(1. 海军工程大学 兵器工程系, 湖北 武汉, 430033; 2. 中国人民解放军92910部队监修室, 浙江 舟山, 315834)
为了简化对转永磁同步电机(PMSM)的结构, 提高其工作性能, 研究了该种电机的无位置传感器控制技术。结合面贴式对转PMSM的性质, 建立了其数学模型, 利用电机稳态时双转子转速相等的特点, 提出了一种基于高频脉振电压信号注入的转速估算方法。设计了转速跟踪观测器, 建立了对转PMSM的仿真模型和无位置传感器矢量控制系统。仿真结果与理论分析相吻合, 表明该系统可使面贴式对转PMSM在全速域内实现无位置传感器控制, 系统跟踪准确, 响应迅速, 鲁棒性强。
对转永磁同步电机; 无位置传感器控制; 全速域; 高频脉振电压; 矢量控制
0 引言
对转永磁同步电机(permanent magnet synchronous motor, PMSM)[1]功率密度高、转矩脉动小, 有2个机械输出端口, 无陀螺效应, 可直接驱动对转螺旋桨推进系统, 在鱼雷和无人水下航行器等水下电力推进领域有广泛的应用前景。
对转PMSM由一个定子和内外2个转子组成, 如图1所示。外转子的内表面和内转子的外表面安装径向磁化的稀土永磁体。定子内外两侧安装螺线管绕组, 绕组端部比常规电机大幅缩短, 因而功率密度和效率大幅提高[2]。电枢内外两层绕组的相序相反[3], 因而在2层气隙中产生等大而反向旋转的磁场。

图1 对转PMSM结构
文献[1]研究了双转子PMSM的基本结构和绕组设计方法。文献[3]探讨了对转PMSM的电磁模型和工作原理。但已有文献中关于对转PMSM控制策略的研究很少, 特别是当推进器受到扰动时, 两转子转速发生差异, 电机发生陀螺效应, 限制了其在精密航行器上的应用。因此, 研究该电机的控制策略, 消除电机的陀螺效应, 对水下电力推进具有重要意义。
1 无位置传感器控制技术
传统高性能控制系统中, 为了实现精确控制, 通常需要在转子轴上安装机械传感器以检测位置[4], 使电机增加了体积、成本和复杂度, 降低了可靠性。对转PMSM至少需要6套霍尔传感器和6个馈电环才能得到转子的准确位置, 大幅增加了结构复杂度。为克服机械式传感器带来的缺陷, 学者们开展了无位置传感器系统的研究[5]。
因为脉振高频电压注入法能检测面贴式PMSM的饱和凸极, 本文针对对转PMSM稳态时双转子速度相等的特点, 设计了一种基于高频脉振电压注入的转子位置检测方法, 可在全速域内完成对转PMSM的无位置传感器控制, 同时实现双转子的转速跟随。
2 脉振高频电压注入原理
脉振高频电压注入法是在估计的旋转坐标系横轴上注入高频正弦电压信号, 使电机呈现一定的饱和凸极性, 可从响应电流中提取转子位置信息[6]。
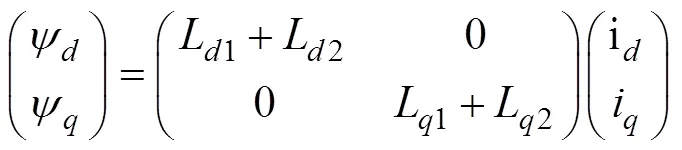
高频脉振电压频率ω远大于电机供电频率ω, 故电机的阻抗主要取决于自感, 磁链方程可简化为
在预测坐标系上, 定义内转子转速估计误差Δ11-1, 外转子转速估计误差Δ22-2。
设内电机平均电感L=(L1+L1)/2, 半差电感Δ1=(L1-L1)/2, 转子位置电角度1; 外电机平均电感2=(L2+L2)/2, 半差电感2=(L2-L2)/2, 转子位置电角度2。可得
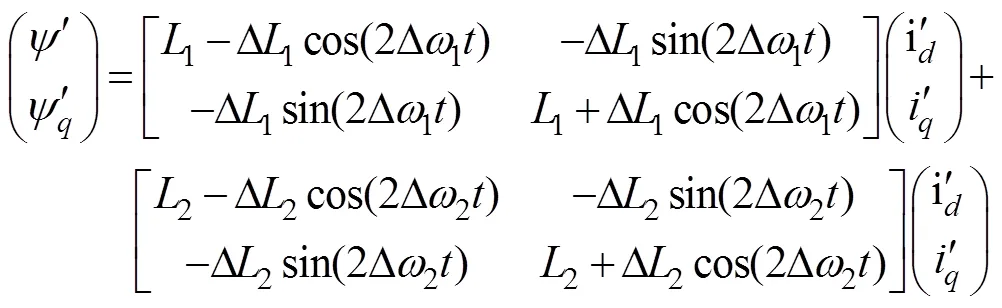
在预测坐标系的轴上注入角频率为ω, 幅值为V的高频电压信号, 即

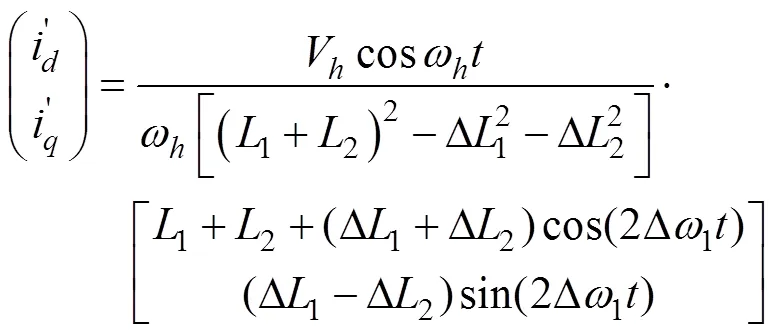
对转PMSM稳态时2个转子转速大小相等, 方向相反, 即2=-1,2=-1, 故Δ2=-Δ1, 联立式(2)和式(3)可得高频脉振电压激励下, 对转PMSM的电流响应

分母中也包含和凸极有关的信息, 但相对于高频电流其幅值可忽略不计, 因此有
因为电机存在饱和电感(Δ1, Δ2≠0),和轴高频电流分量的幅值都与转子位置估计误差有关。当这个误差降为零时,轴高频电流降为零, 因而可以将轴高频电流进行信号处理后作为转速观测器的输入, 以此获得转子的速度。先对轴高频电流进行幅值调制
采用低通滤波器(low pass filter, LPF)滤除二次谐波分量, 在Δ1很小时, 将直流分量线性化可得
因此可以通过调节KΔ1趋向零来获得一定误差的转速。
3 无位置传感器控制系统
3.1 电机仿真模型
将对转PMSM分解为内电机和外电机[7](定子内侧绕组和内转子构成内电机, 定子外侧绕组和外转子构成外电机), 根据对转PMSM的特性, 建立其仿真模型, 对2个转子分别输入不同的负载转矩, 以探索电机的抗扰动特性, 电机的机械模型如图2所示。

图2 机械模型
3.2 转速跟踪观测器
电枢中输入脉振高频电压矢量后, 定子响应电流主要包括基频电流、低次谐波电流、高频响应电流、高频脉冲宽度调制开关谐波电流。只有高频响应电流含有位置信息, 调节比例积分(proportional integral, PI)参数将转速误差降为0, 即可得到所需的转速信息。为了提取轴上高频电流中的转速信息, 可采用以下3个步骤。
1) 采用一个带通滤波器提取在估计转子速坐标系的高频电流。
2) 采用乘法器提取轴高频电流中与半差高频电感有关的电流分量, 经LPF得到KΔ1。
3) 使用PI调节得到转速1。
3.3 控制系统结构
对转PMSM中, 内外电机的电枢串联, 仅需要对定子电流进行控制, 就可以完成双转子转速和转矩的控制。矢量控制系统采用转速、电流双闭环控制, 其中电流环采用i=0模型。当电机受到扰动时, 2个转子的转速产生差异, 电机发生陀螺效应。系统对内外2个转子采用相同的参考转速, 分别进行PI调节; 同时采用外转子位置角进行Park变换, 让内转子转速跟随外转子转速, 可以使扰动后2个转子迅速恢复等速。
图3为脉振高频电压注入法的原理, 其中带通滤波器(band pass filter, BPF)和LPF, 连同PI调节器和积分器构成了转速跟踪观测器。双闭环控制下, 转速估算值与实测值差异很小, 适当调节PI参数, 即可控制转速误差趋于零。
4 实验系统及结果分析
实验电机由空间矢量脉宽调制(space vector pulse width modulation, SVPWM)逆变器供电,以DSP TMS320LF2812为控制核心, 设置光电编码器检测实际转速和位置, 以便与估算值进行比较。逆变器开关频率为l0 kHz, 高频电压频率为l kHz, 其幅值为基波幅值的20%。速度切换区为150~300 r/min。

图3 脉振高频电压注入法原理
空载时电机起动到低速区100 r/min, 0.1 s时转速指令阶跃到切换区200 r/min, 0.2 s时转速再次阶跃到额定转速1 000 r/min, 0.3 s时转速指令降低到200 r/min。
图4为内外转子速度估计值。图5为内外转子速度测量值(纵坐标每格为400 r/min-1, 横坐标每格为0.04 s), 图4和图5表明, 转速实测值比估计值脉振大, 反应慢。图6为内外转子位置估算误差(纵坐标每格为5°, 横坐标每格为0.04 s), 图6表明, 转子位置估算误差在允许范围内。图7为内外转子的转速差(纵坐标每格为2 r/min-1, 横坐标每格为0.04 s), 图7表明, 双转子的最大转速差为额定转速的0.5%。实验表明, 这种基于脉振高频电压注入法和模型参考自适应法能在高低速时实现平滑切换, 且可维持双转子的等速。
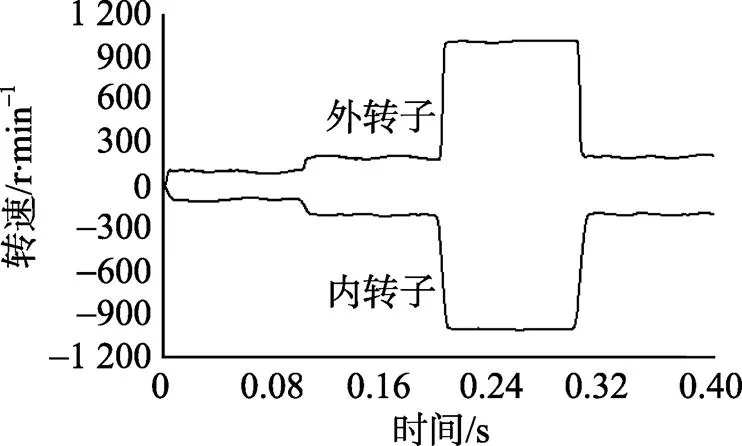
图4 内外转子速度估计值
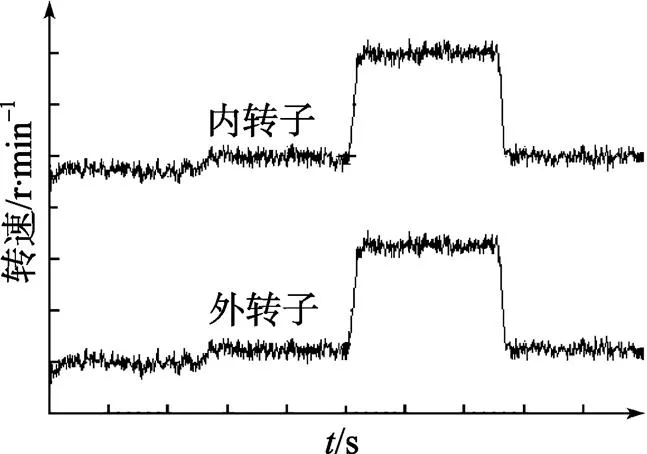
图5 内外转子速度测量值

图6 内外转子位置估算误差

图7 内外转子转速差
5 结束语
本文在面贴式对转PMSM电枢中注入脉振高频电压, 设计转速观测器从高频响应电流中估算转速, 可以在全速域内实现无位置传感器控制。系统结构简单, 鲁棒性强, 跟踪精度高, 转矩脉振小, 特别适合于凸极率较小的面贴式对转PMSM。
[1] Zhang Feng-ge, Liu Guang-wei, Shen Yong-shan. Characteristic Study on a Novel PMSM with Opposite-rotation Dual Rotors[C]//IEEE International Conference on Electrical Machines and Systems, Seoul, Oct 2007: 805-809.
[2] Pavani Gottipati. Comparative Study of Double Rotor Permanent Magnet Brushless Motors with Cylindrical and Disc Type Slot-less Stator[D]. Louisiana State University, Baton Rouge, August 2007.
[3] Chen Jin-hua, Zhang Feng-ge. Design and Finite Element Analysis on a Novel PMSM with Anti-rotation Dual Rotors[C]//IEEE Proceedings on Automation and Logistics, Shenyang, China, Aug 2009: 315-318.
[4] 张梅, 何国庆, 赵海翔. 直驱式永磁同步风力发电机组的建模与仿真[J]. 中国电力, 2008, 41(6): 79-84. Zhang Mei, He Guo-qing, Zhao Hai-xiang. Modeling and Dynamic Simulations of a Direct Driven Permanent Magnet Synchronous Generator Based Wind Turbine Unit[J]. Chinese Electric Power, 2008, 41(6):79-84.
[5] 田明秀, 王丽梅, 郑建芬. 永磁同步电机无传感器转速和位置控制方案[J]. 沈阳工业大学学报, 2005, 27(5): 518- 521. Tian Ming-xiu, Wang Li-mei, Zheng Jian-fen. Sensorless Position and Speed Control Scheme for Permanent Magnet Synchronous Motor Drives[J]. Journal of Shenyang University of Technology, 2005, 27(5): 518-521.
[6] 廖勇, 沈朗, 姚骏. 改进的面贴式永磁同步电机转子初始位置检测[J]. 电机与控制学报, 2009, 23(2): 203-208. Liao Yong, Shen Lang, Yao Jun. Initial Rotor Position Detection for Surface Mounted PMSM Based on Rotating High Frequency Signal Injection[J]. Electric Machines and Control, 2009, 23(2): 203-208.
[7] 郭希铮, 温旭辉, 游小杰. 永磁型双机械端口电机的电磁耦合分析[J]. 中国电机工程学报, 2010, 30(21): 73-78. Guo Xi-zheng, Wen Xu-hui, You Xiao-jie. Electromagnetic Coupling Analysis of Permanent Magnet Dual Mechanical Port Machine[J]. Proceedings of the CSEE, 2010, 30(21): 73-78.
Non-position-sensor Control for Counter-rotating PMSM Based on High Frequency Voltage Pulse Injection
XU Hai-zhu1, XIE Shun-yi1, CUI Wei-kai2, WANG Song-lin1
(1. Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China; 2. Repair Monitoring Office of 92910thUnit, The People′s Liberation Army of China, Zhoushan 315834, China)
To simplify the configuration of counter-rotating permanent magnet synchronous motor(PMSM) and improve its working performance, a non-position-sensor control technique for counter-rotating PMSM is studied. A mathematic model for counter-rotating PMSM is deduced according to the character of surface-mounted PMSM. A speed estimation method is proposed based on high frequency voltage pulse injection according to equal speed of inner and outer rotors in steady state. Moreover, a speed tracking observer is designed, and both simulation model and non-position-sensor control system of counter-rotating PMSM are established. Simulation results agree well with theoretical analysis, which verifies that the proposed strategy is competent for non-position-sensor control of surface-mounted PMSM in full speed scope with accurate tracking performance, high robustness and quick response.
counter-rotating permanent magnet synchronous motor(PMSM); non-position-sensor control; all speed scope; high frequency voltage pulse; vector control
TJ630.32; TM 351
A
1673-1948(2012)04-0290-05
2012-03-26;
2012-04-20.
国家自然科学基金项目(51137005); 部级国防科技预研基金项目(4010601020101).
徐海珠(1983-), 男, 在读博士, 研究方向为水下电力推进与电机控制.
(责任编辑: 陈 曦)