无刷直流电机直接转矩控制系统
2012-05-28王松林谢顺依徐海珠连军强
王松林, 谢顺依, 徐海珠, 连军强
无刷直流电机直接转矩控制系统
王松林, 谢顺依, 徐海珠, 连军强
(海军工程大学 兵器工程系, 湖北 武汉, 430033)
针对无刷直流电机换相期间存在较大的转动脉动,将直接转矩控制方法用于无刷直流电机控制系统中,分析了直接转矩控制的原理,结合无刷直流电机自身的特点,提出了略去磁链观测环节的无刷直流电机直接转矩控制方案。该方案转矩环采用滞环控制,根据转矩环输出和磁极位置决定施加的电压空间矢量。仿真和试验结果均表明,该方法能够较好地抑制无刷直流电机的转矩波动,具有良好的转矩动态响应。
无刷直流电机; 直接转矩控制; 电压空间矢量; 转矩脉动
0 引言
无刷直流电机(brushless DC motor, BLDCM)具有恒定的机械转矩和优良的机械功率特性, 结构简单、运行可靠、调速性能好, 在工业、航天航空等领域得到了日益广泛的应用。由于齿槽转矩和非理想的方波输入、换相等多方面因素使永磁BLDCM的转矩波动比较明显, 影响了其性能的进一步提升, 限制了其在高精度伺服系统中的应用[1-4]。
为了抑制BLDCM的转矩脉动, 提高转矩动态性能, 国内外许多学者进行了大量的研究。文献[5]通过反电动势与电流的乘积获得估测的转矩, 并利用转矩控制器减小了系统的转矩脉动。有学者把直接转矩控制(direct torque control, DTC)思想引入到BLDCM控制系统中。文献[6]提出了BLDCM的直接转矩控制, 采用转矩和磁链双闭环, 电压矢量在两相导通模式中选取。该方案保持了传统120°导通模式下良好的转矩特性, 同时抑制了因换相和非理想反电动势引起的转矩脉动, 具有更好的转矩动态响应。
为了简化BLDCM-DTC系统, 根据BLDCM具有位置传感器的特点, 提出了无磁链观测DTC方案。电机连续运行时, 由于位置传感器给出的电压空间矢量恰好能够在电机定子上产生六边形的磁链, 所以将DTC用于BLDCM时, 可以省去磁链观测部分, 又能利用其转矩控制的高动态性, 将电机的转矩波形限定在规定的范围内。
1 BLDCM数学模型
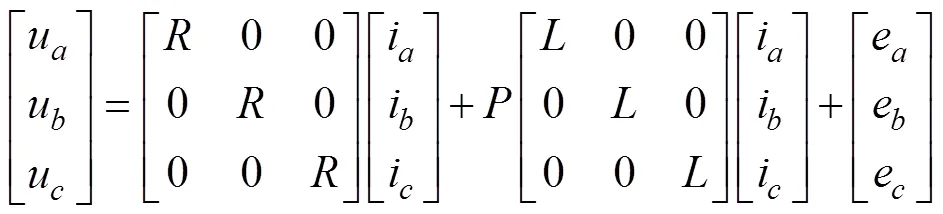
BLDCM的反电动势为梯形波, 忽略磁路饱和、磁滞和涡流损耗、换相过程和电枢反应等影响, 以三相对称Y型连接的BLDCM为例, 电机的电压平衡方程为
电磁转矩方程为

2 BLDCM-DTC策略
2.1 电压矢量
永磁BLDCM的脉宽调制(pulse-width modulated, PWM)控制中一般采用两两导通方式, 即每一时刻最多有2个功率管导通, 每隔1/6周期(60°电角度)换相一次, 每次只换相1个功率管, 因此对于逆变器来说有6个通电状态和1个全关断状态。逆变器的空间电压矢量可定义为

本文用6位二进制数来表示其电压空间矢量, 每位二进制数代表一个功率管的状态, 1表示功率管导通, 0表示功率管关断。如图1所示各功率管的开关状态与非零电压空间矢量的对应关系。
2.2 直接转矩控制原理
由电机统一理论可知, 电机的电磁转矩可以表示为[7]

式中: 为转矩系数; 为定子磁链空间矢量幅值; 为转子磁链空间矢量幅值; 为定转子磁链之间的夹角, 即磁通角。
对于永磁BLDCM而言, 在实际运行中, 转子磁链幅值由永磁体产生, 其大小近似不变, 因此根据式(4), 只要控制定子磁链幅值不变, 改变磁通角的大小就可以控制电磁转矩。BLDCM直接转矩控制的基本思想就是使定子磁链沿六边形或近似圆形轨迹运行, 通过电压空间矢量来控制定子磁链的旋转速度, 控制定子磁链走走停停来改变定子磁链的平均旋转速度, 以调节磁通角的大小, 进而控制电机的电磁转矩。
3 BLDCM-DTC方案


式中: 为电机极对数; , 分别是转子磁链在轴的分量; , 分别是定子电流在轴的分量; 为转子电角度。
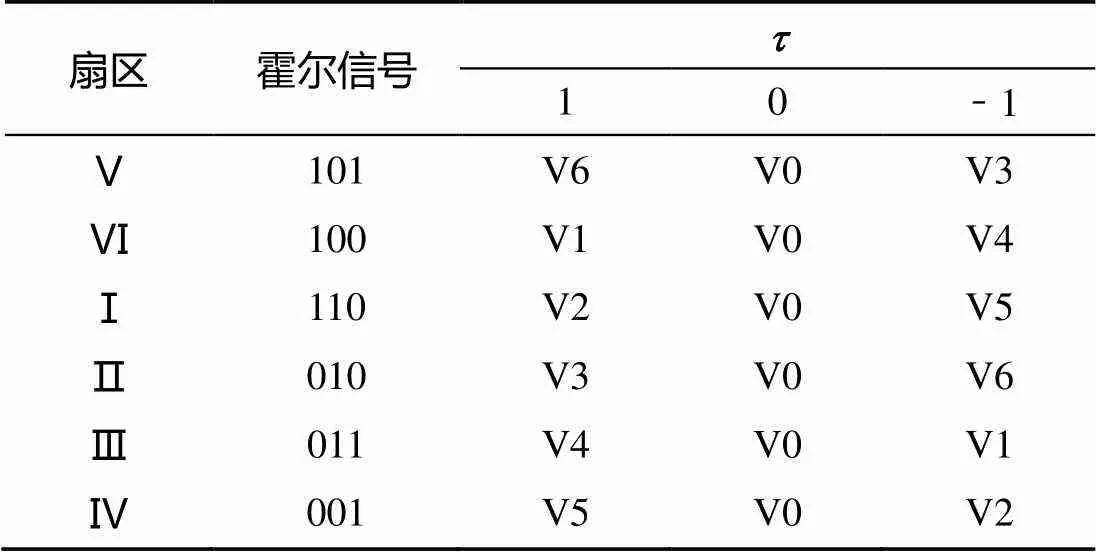
表1 电压空间矢量选择表
式(5)中对相关量进行整理


将式(6)和式(7)代入式(5)中得

4 仿真结果与分析

图3给出系统在负载转矩为0.3 N×m的情况下, 采用DTC和传统PWM电流控制方法的转矩波形。从图3(a)和图3(b)比较可以看出, 采用DTC使得了转矩脉动明显减小了。图4为2种控制方法的相电流仿真波形, 从中可以看出, 相较于传统PWM电流控制, BLDCM-DTC控制系统中, 相电流波形有了很大改观。

图3 转矩仿真波形

图4 相电流仿真波形
图5和图6给出了试验波形, 从中可以看出, 转矩和电流的波形基本上和仿真结果一致。从仿真和试验来看, 本文提出的BLDCM-DTC方案具有较好的动态性能, 能够有效地抑制换相引起的转矩脉动。
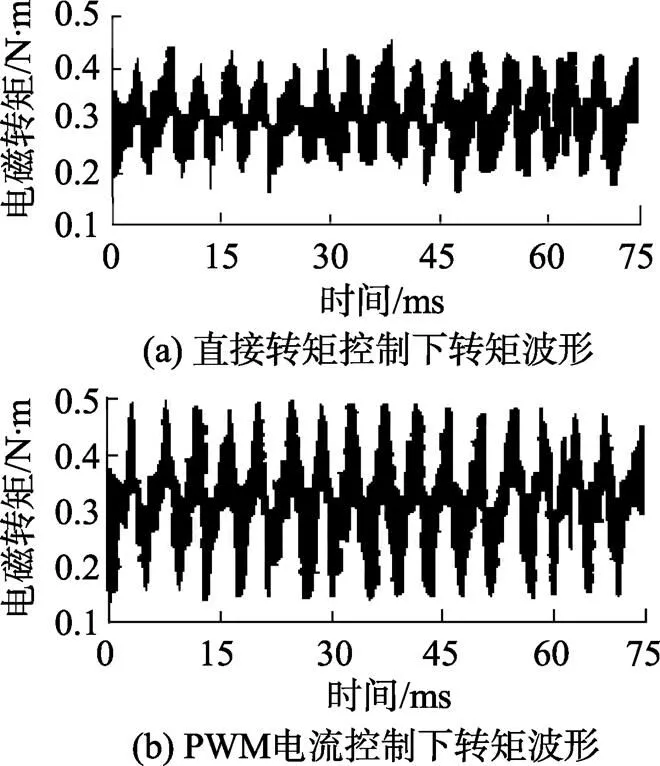
图5 转矩试验波形

图6 相电流试验波形
5 结束语
本文研究了BLDCM直接转矩控制策略, 该策略较传统PWM电流控制具有更快的转矩响应性能。BLDCM的特殊性使得在对其进行直接转矩控制时, 可以略掉磁链观测部分, 可简化控制系统的结构。仿真试验结果表明, 该控制系统结构简单、控制精度高, 为进一步研究BLDCM直接转矩控制方法提供参考。
[1] Zhu Z Q. Direct Torque Control of Brushless DC Drives with Reduced Torque Ripple[J]. IEEE Transactions on Industry Applications, 2005, 41(2): 599-605.
[2] Idris N R N. Direct Torque Control of Induction Machines with Constant Switching Frequency and Reduced Torque Ripple[J]. IEEE Transactions on Industrial Electronics, 2004, 51(4): 758-767.
[3] 夏长亮, 李正军, 杨荣, 等. 基于自抗扰控制器的BLDCM控制系统[J]. 中国电机工程学报, 2005, 25(2): 82-86. Xia Chang-liang, Li Zheng-jun, Yang Rong, et al. Control System of Brushless DC Motor Based on Active-distur- bance Rejection Controller[J]. Proceedings of the CSEE, 2005, 25(2): 82-86.
[4] 揭贵生, 马伟明, 耿建明, 等. 无刷直流电机的一种新型转矩与效率优化控制[J]. 中国电机工程学报, 2006, 26(24): 131-136. Jie Gui-sheng, Ma Wei-ming, Geng Jian-ming, et al. A New Optimizing Control Method of Torque and Efficiency for Trapezoidal BLDCM[J]. Proceedings of the CSEE, 2006, 26(24): 131-136.
[5] Liu Y, Zhu Z Q, Howe D. Direct Torque Control of Brushless DC Motor with Non-ideal Trapezoidal Back-EMF[J]. IEEE Transactions on Industrial Electronics, 1995, 10(6): 769-802.
[6] Yong L, Zhu Z Q. Howe D. Direct Torque Control of Brushless DC Drives with Reduced Torque Ripple[J]. IEEE Transactions On Industrial Electronics, 2005, 41(2): 599- 608.
[7] 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 1997.
[8] 王晓远, 田亮, 冯华. BLDCM直接转矩模糊控制研究[J]. 中国电机工程学报, 2006, 26(15): 134-138. Wang Xiao-yuan, Tian Liang, Feng Hua. Study of the Fuzzy Control on Direct Torque Control for BLDCM[J]. Proceedings of the CSEE, 2006, 26(15): 134-138.
Direct Torque Control for Brushless DC Motor
WANG Song-lin, XIE Shun-yi, XU Hai-zhu, LIAN Jun-qiang
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
To reduce the torque ripple generated in commutation period of blushless DC motor (BLDCM), the direct torque control (DTC) is used to control BLDCM. The direct torque control principle is analyzed, and a direct torque control scheme for BLDCM without observation of flux linkage is proposed according to the characteristics of BLDCM. In this scheme, a hysteresis-controlled torque loop is adopted, and the voltage space vectors are determined by torque loop output and position of magnetic poles. Simulation and experimental results indicate that the DTC method can significantly reduce the torque ripple of BLDCM and gain perfect dynamic performances.
brushless DC motor(BLDCM); direct torque control(DTC); voltage space vector; torque ripple
TJ631.2
A
1673-1948(2012)05-0367-04
2012-04-29;
2012-05-17.
王松林(1985-), 男, 在读博士, 研究方向为鱼雷无刷直流电机优化控制.
(责任编辑: 陈 曦)