一种混合动力水下滑翔机的操纵性研究
2012-05-28宋保维孟祥尧
宋保维, 孟祥尧
一种混合动力水下滑翔机的操纵性研究
宋保维, 孟祥尧
(西北工业大学 航海学院, 陕西 西安, 710072)
混合动力水下滑翔机是一种加装了鳍舵和螺旋桨推进系统的新型水下滑翔机。为了验证混合动力水下滑翔机的总体性能, 研究了其在海洋环境中不同工作状态下的操纵性。混合动力水下滑翔机除可进行无动力滑翔外, 为了提高运动性能, 提出了2种混合工作模式, 即有动力推进时结合重心调节与无动力滑翔时结合舵操作。根据动量和动量矩定理建立了水下滑翔机的空间运动数学模型和海流动力学模型, 对不同的工作状态进行了仿真。结果表明, 混合动力水下滑翔机的无动力滑翔与有动力推进的转换过程具有良好的操纵性和稳定性, 但在进行无动力滑翔时易受海流的影响发生偏移, 混合工作模式效果良好, 具有可行性。
水下滑翔机; 操纵性; 海流
0 引言
水下滑翔机是一种利用浮力驱动的新型水下机器人, 其能源消耗低、噪音小、成本低, 满足了长时间、大范围海洋探索的需要, 同时也具有重要的军事应用价值。国内外都对水下滑翔机进行了研究[1-4]。但由于水下滑翔机航行速度低, 而其所处海洋环境又比较复杂, 导致其易受风浪海流的影响, 航迹和定位精度低。混合驱动水下滑翔机是一种通过增加鳍舵和螺旋桨推进系统, 提高航行定位精度和机动性的新型水下航行器, 在一定程度上弥补了水下滑翔机的不足。目前, 世界上对混合驱动水下滑翔机的研究仍处于初始研究阶段。美国普林斯顿大学机械与航空工程系Leonard教授提出在滑翔器后加一螺旋桨的概念设计[5]; Webb研发公司(WRC)曾设计开发SLOC-UMAUV水下潜器, 其在电驱动SLOCUM滑翔器的基础上增加了螺旋桨推进器, 构成混合型水下滑翔机, 该滑翔机有10%的工作时间处于AUV工作模式下[6]。法国、日本等国也进行了相关研究。国内天津大学设计了首台混合驱动水下滑翔机[7], 并进行了系统设计及相关的性能分析[8-9], 取得了一定的成果。
本文研究的混合动力水下滑翔机具体结构见图1。混合动力水下滑翔机既可以进行无动力滑翔, 也可以进行有动力推进。在任务初始阶段, 利用无动力滑翔的远航程能力航行至较远的目标地点, 到达后转换为有动力推进, 使其可以快速、机动和准确地完成目标任务, 任务结束后还可再次转换为无动力滑翔返回。另外, 在航行途中遇到较强海流影响时, 也可通过有动力推进防止随波逐流。本文还提出了将2种工作方式结合的混合驱动工作模式, 以达到更好的工作效果。
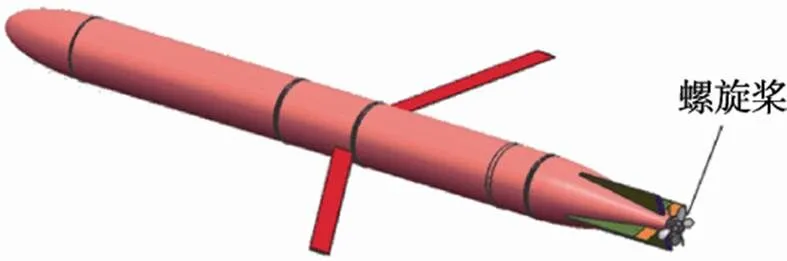
图1 混合动力水下滑翔机模型
混合动力水下滑翔机总体设计完成后, 对其进行操纵性分析是验证总体性能的主要组成部分。本文研究的目的就是针对混合动力水下滑翔机建立空间运动数学模型及海流数学模型, 通过仿真典型的航行轨迹、各工作状态间转换以及混合驱动工作模式来分析其在海洋环境下的操纵性, 另外对其在环境意外扰动下的稳定性进行了研究, 为下一步研究工作提供一定的理论参考。
1 空间运动数学模型
1.1 空间运动方程




为方便在Matlab/Simulink中进行数值仿真, 采用矢量形式来建立空间运动方程。根据动量和动量矩定理可得到水下滑翔机的动力学方程[11-12]

其中


考虑到主体与滑翔翼之间的干扰, 使用CFX流体仿真软件对该模型的升力、阻力和俯仰力矩在不同条件下进行仿真计算, 得到的数据修正相关流体动力参数[14]。混合动力水下滑翔机的主要流体动力参数计算结果如表1所示。

表1 翼身组合体流体动力参数计算结果
运动仿真的运动学方程式为[11]
1.2 海流数学模型
由于水下滑翔机运动在海洋一定深度下, 波浪的影响较小可以忽略, 但需要考虑到海流的影响。自然界的海流非常复杂, 受多种因素的影响与制约, 目前很难用精确的数学表达式描述其运动规律。因此在分析时一般假定海流速度为常量来进行分析[10], 即

水下滑翔机在运动过程中受到的流体动力都取决于其相对于流体的速度、攻角和侧滑角等, 因此, 动力学方程中各参数在这个意义上都是相对于流体的, 在无海流时才是相对于地面坐标系的。因此可以通过绝对运动、相对运动及牵连运动的关系, 获得水下滑翔机在海流中运动时相对于地面坐标系的运动参数, 具体关系如下。


2 不同情况下的操纵性仿真与分析

2.1 无动力滑翔

仿真结果可以看出, 混合动力水下滑翔机很好地完成了2种典型滑翔运动并且具有较高的效率。同时,和方向均出现了偏移, 说明水下滑翔机受海流影响明显, 这也是水下滑翔机的不足之处, 航迹和定位精度低。当混合动力水下滑翔机开启动力推进模式后将有助于改善它的缺点。
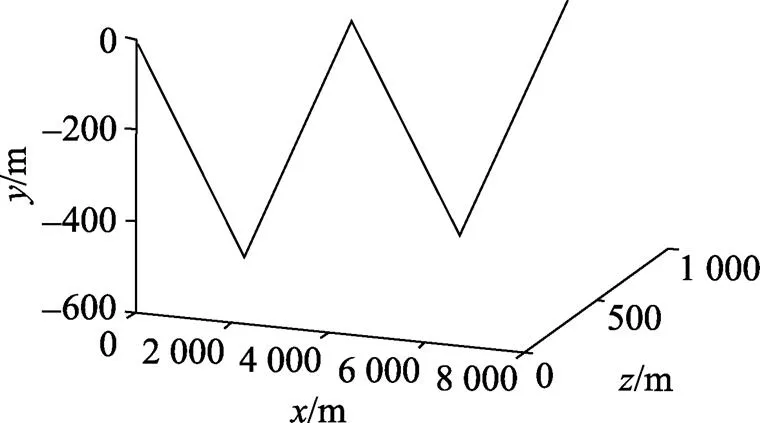
图2 垂直面滑翔轨迹

图3 空间回旋(zc=0.4 m)
2.2 无动力滑翔转换为有动力推进的操纵性
当混合动力水下滑翔机滑翔至目标区域后, 为快速准确地执行任务, 转换为有动力推进工作模式。或者当遇到较强海流影响时, 也可启动动力推进模式。仿真过程: 水下滑翔机初始进行滑翔运动, 工作模式转换后目标为-100 m深度定深直航, 目标速度5 kn。图4~6给出了上述过程的仿真结果。
从结果看出, 水下滑翔机工作状态转换的操纵性良好, 转换过程平稳, 速度以及俯仰角变化过程稳定, 转换之后可以快速准确的完成目标任务, 有效改善了航迹和定位精度低的缺点。
2.3 混合工作模式的操纵性
为达到更好的航行效果, 提高运动性能, 本文提出了2种混合工作模式, 即有动力推进结合重心调节和无动力滑翔结合舵操作。下面对这2种混合工作模式的操纵性和稳定性进行分析。

图4 工作状态转换的轨迹
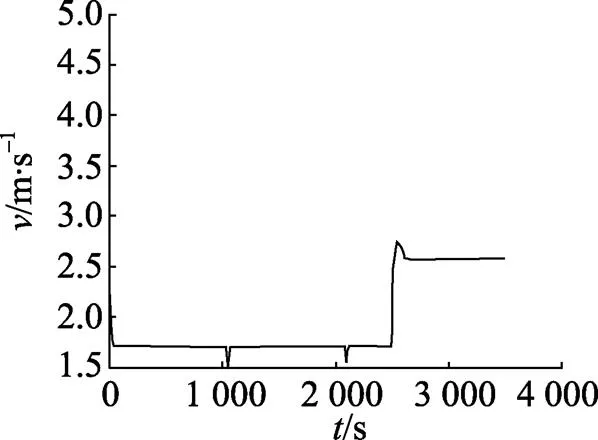
图5 速度变化曲线

图6 俯仰角变化曲线
由于速度较低时, 舵产生的作用力不足, 使得有动力推进时垂直平面内的寻深俯仰角较小, 寻深比较缓慢。为此, 本文提出有动力推进结合重心调节的混合工作模式, 通过加入重心调节机构来增加俯仰角, 加快寻深过程。
假设初始航行深度为水下80 m, 目标以5 kn的速度在水下20 m稳定航行。仿真结果如图7所示。可以看出, 与图8中仅依靠舵寻深相比, 图7寻深明显加快, 并且俯仰角和速度变化都比较平稳, 未出现太大的波动, 操纵性与稳定性良好。
无动力滑翔结合舵操作则是针对水下滑翔机的机动性较差提出的, 例如在进行回旋时, 由于是依靠调节重心偏移产生横滚来改变航向, 航向改变较慢, 回旋半径较大。若此时加入垂直舵的作用, 将有利于加快航向改变, 使回转半径减小, 提高机动性。仿真结果见图9, 在加入舵操作后, 回旋半径明显减小。在其他的滑翔运动过程中也可根据实际情况加入舵操作来提高机动性。
3 结束语
仿真结果显示, 无动力滑翔与有动力推进的相互转换过程具有良好的操纵性和稳定性, 单纯的无动力滑翔易受海流影响, 转换为有动力推进工作模式可有效弥补不足, 快速准确完成任务。本文提出2种混合工作模式, 即无动力滑翔结合重心调节与无动力滑翔结合舵操作, 提高了工作效率及滑翔机的机动性, 具有可行性。本文通过对混合动力水下滑翔机操纵性分析, 验证了总体设计, 给后续研究工作提供有价值的理论参考。

图7 混合工作模式下的垂直面寻深
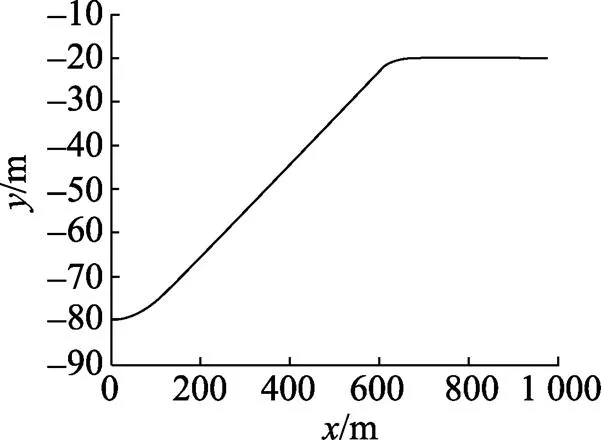
图8 普通的垂直面寻深弹道

图9 混合工作模式下的空间回旋
[1] Sherman J, Davis R E, Owens W B, et al. The Autonomous Underwater Glider “Spray”[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 437-446.
[2] Rudnick D, Davis R, Ohman M, et al. The underwater glider Spray: Observations around the World[R]. Ocean Observations, 2009.
[3] Mahmoudian N, Geisbert J, Woolsey C. Approximate Analytical Turning Conditions for Underwater Gliders: Implications for Motion Control and Path Planning[J]. IEEE Journal of Oceanic Engineering, 2010, 35(1): 131-143.
[4] 俞建成, 张奇峰, 吴利红, 等. 水下滑翔机器人系统研究[J]. 海洋技术, 2006, 25(1): 6-10.Yu Jian-cheng, Zhang Qi-feng, Wu Li-hong, et al. Research Progress in Underwater Gliders[J]. Ocean Technology, 2006, 25(1): 6-10.
[5] Bachmayer R, Leonardy N E, Gravery J, et al. Underwater Gliders: Recent Developments and Future Applications [C]//IEEE International Symposium on Underwater Technology(UT′04), Tapei, Taiwan, 2004:195-200.
[6] Jenkins S, Humphreys D, Sherman J, et al. Underwater Glider System Study[R]. USA: Office of Naval Research, 2003.
[7] 王晓鸣. 混合驱动水下自航行器动力学行为与控制策略研究[D]. 天津: 天津大学, 2009.
[8] 武建国. 混合驱动水下滑翔器系统设计与性能分析[D]. 天津: 天津大学, 2010.
[9] 武建国, 陈超英, 王树新, 等. 混合驱动水下滑翔器滑翔状态机翼水动力特性[J]. 天津大学学报, 2010, 43(1): 84-89.Wu Jian-guo, Chen Chao-ying, Wang Shu-xin, et al. Hydrodynamic Characteristics of the Wings of Hybrid- Driven[J]. Journal of Tianjin University, 2010, 43(1): 84-89.
[10] 严卫生. 鱼雷航行力学[M]. 西安: 西北工业大学出版社, 2005.
[11] Du X X, Song B W, Pan G. Dynamics and Simulation of Underwater Glide Vehicle[C]//2010 International Conference on Digital Manufacturing & Automation, 2010.
[12] Hussain N A A, Arshad M R, Mohd-Mokhtar R. Underwater Glider Modelling and Analysis for Net Buoyancy, Depth and Pitch Angle Control[J]. Ocean Engineering, 2011, 38(16): 1782-1791.
[13] 张宇文. 鱼雷外形设计[M].西安: 西北工业大学出版社, 1998.
[14] 胡仞与. 水下滑翔机垂直面运动研究[D]. 上海: 上海交通大学, 2008.
Maneuverability Analysis of a Hybrid Power Underwater Glider
SONG Bao-wei, MENG Xiang-yao
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
Hybrid power underwater glider is a new kind of underwater glider equipped with rudders and propeller system. To validate its performance, the maneuverability under different working conditions in the ocean environment was investigated. A mixed working mode was proposed for a hybrid power underwater glider to improve its navigation capability, i.e. adjusting the center of gravity when the glider is powered, and operating rudders when it is gliding without power. Spatial motion equations were established according to the momentum theorem and the moment of momentum theorem, and a mathematical model of ocean current was constructed. Then different working conditions were simulated numerically. The results show that satisfactory maneuverability and stability of the transition between unpowered gliding and powered propulsion are obtained, but deviation due to ocean current occurs during unpowered gliding period; and the proposed mixed working mode is feasible.
underwater glider; manoeuvrability; ocean current
TJ630.1
A
1673-1948(2012)05-0326-05
2012-02-08;
2012-03-24.
宋保维(1963-), 男, 教授, 博士生导师, 研究方向为水下航行器总体设计技术、减阻降噪技术、可靠性优化设计与评定技术、多学科设计优化技术等.
(责任编辑: 陈 曦)
