多传感器融合定位控制系统设计
2012-05-09罗亚辉胡文武
罗亚辉, 蒋 蘋, 胡文武
多传感器融合定位控制系统设计
罗亚辉, 蒋 蘋, 胡文武
(湖南农业大学 工学院, 湖南 长沙, 410128)
为实现水田作业机械的精确定位, 在惯性传感器定位的基础上, 设计了一套基于激光的多传感器融合定位系统. 该系统以激光、陀螺仪与编码盘等传感器模块为硬件基础, 结合卡尔曼滤波算法实现了多传感器的数据融合. 试验结果表明: 在50 m×50 m的测试范围内, 静态定位误差小于10 cm, 系统定位可靠, 精度较高, 达到了预期研究目标.
惯性传感器; 激光; 多传感器融合; 定位; 控制系统
精准农业以其科学的管理与高效的作业取得了对自然资源的最大节约和利用, 为更好的推行精准农业, 农田作业机械正逐步向自动化与智能化方向发展, 而农田作业机械的自动定位是现代智能农业机械研究的一个重要部分, 在国内外各研究机构均进行了相关研究. 如美国Stanford大学的研究者对基于GPS导航的自动控制系统开展了研究; 英国Silsoe研究所从农作物保护的角度出发, 建立了田间车辆的扩展Kalman滤波器模型, 并对锄草拖拉机进行了自动控制改装后的田间实验; 日本农林水产省农业中心研发了自动导航的无人播种机和插秧机. 在国内, 中国农业大学研究的谷物联合收获机智能测产系统采用了DGPS技术对测量点的位置坐标进行定位, 华南农业大学的罗锡文教授等以智能移动平台为基础研究了基于GPS 和电子罗盘的导航控制系统; 南京农业大学的沈明霞教授等对自主行走农业机器人视觉导航信息处理技术进行了研究[1-4]. 总体上看, 目前研究较多的定位技术为地磁定位、GPS定位以及视觉定位等, 且多数研究处于实验室阶段, 需要进行深入研究.
为探寻适于水田作业机械的定位装置, 本文研究了一种基于激光的多传感器融合定位控制系统. 本控制系统融合了激光、陀螺仪与编码盘等传感器模块, 安装于自制的试验小车上进行定位, 精度较高、稳定性好、可移植性强.
1 系统总体设计
基于激光的多传感器融合定位控制系统主要由中央处理单元、传感器检测单元、通讯单片机、执行单片机、执行输出单元与无线数传单元等组成, 具体结构框图如图1所示.
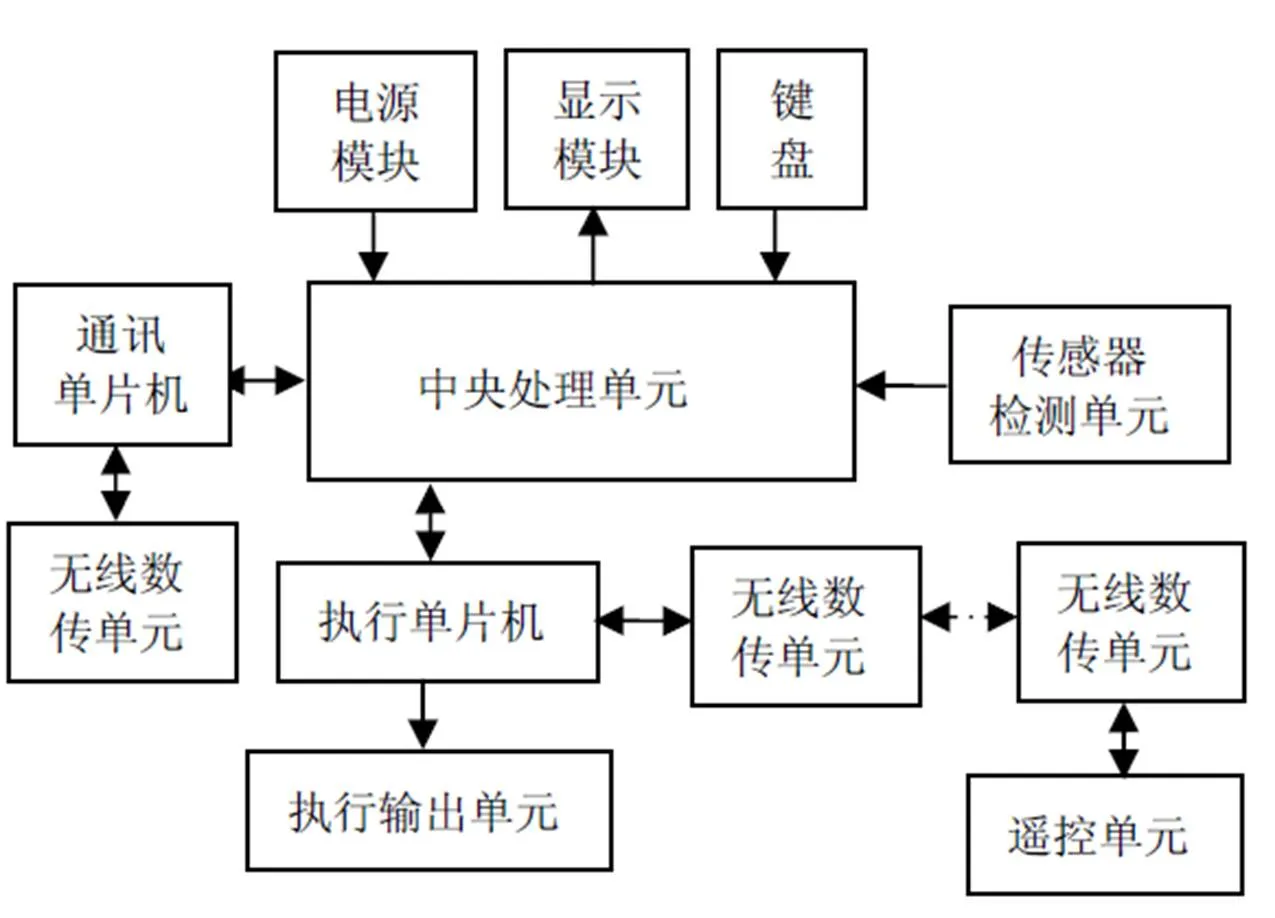
图1 系统总体框图
为使系统能实时定位, 在设计中采用了三片单片机, 即中央处理单元、通讯单片机与执行单片机, 其在工作时各有侧重点. 中央处理单元主要采集传感器检测单元所检测到的位置、速度等相关数据, 并进行定位解算. 通讯单片机主要通过无线数传单元进行通讯; 执行单片机主要控制执行机构, 使试验小车按规定的路线行驶, 由此可避免采用单个单片机而导致的运算不及时; 遥控单元主要是通过无线数传模块控制试验小车行驶, 以采集定位试验数据进行分析.
2 系统硬件电路设计
2.1 中央处理单元
中央处理单元主要接收并处理传感器检测单元中的激光接收模块、编码盘模块和陀螺仪模块等传感器采集的数据信息, 由此解算出试验小车当前的位置坐标信息及其运行参数, 并依据解算出的相关信息控制执行单片机, 使执行输出单元按要求控制试验小车行进. 同时, 控制通讯单片机通过无线数传模块与激光发射部分进行通讯, 以保证激光接收模块能实时接收到激光信息. 中央处理单元电路原理如图2所示.

图2 中央处理单元电路原理
在设计中, 中央处理单元选用芯片STC12C5A60S2, 其中串口RXD和TXD通过Max232转换后接DB9, 与计算机相连, 用于计算机监控与调试; 分时复用串口RXD2与TXD2中6脚、39脚经Max232后接通讯单片机模块, 42脚、43脚通过串口扩展芯片CD4052扩展后分别接各传感器模块与执行模块. 中央处理单元采用轮询的方式采集各传感器数据与执行控制, 并与通讯单片机模块进行通讯, 采集激光发射部分的激光偏转角度信息. 四个开关S1~S4分别用于直接控制试验小车的启动、停止、左转及右转, D1~D4为对应的LED指示, LCD液晶显示则用于显示定位数据.
2.2 传感器检测单元
传感器检测单元包括激光接收模块、编码盘模块和陀螺仪模块等, 因中央处理单元串口数量限制, 在设计中采用串口扩展芯片CD4052扩展. 其电路原理如图3所示.

图3 传感器检测单元电路原理
陀螺仪模块选用音叉式微机械陀螺仪EWTS86进行角速度测量, 并利用积分原理将角速度转换成角度值, 在相对角度测量过程中有较高的精度. 编码盘模块采用自制的磁电式编码盘, 为了以较高的精度采集编码测距信号, 在试验小车的两个后轮上均安装上自制的编码盘, 编码盘材料为有机玻璃, 其上均匀安装磁钉作为信标, 便于磁感应传感器在试验小车行驶时采集脉冲信号. 磁感应传感器的输出为高低电平信号, 可直接输入单片机I/O口进行脉冲计数, 用于测量其行走距离. 编码测距盘结构如图4所示. 图5为编码盘安装在试验小车上的实物图. 结合陀螺仪模块与编码盘模块可对试验小车进行相对定位. 激光接收模块则采用激光测距原理, 在接收到激光发射模块发射的激光信息时, 根据采集的信息进行绝对定位, 提高定位精度.
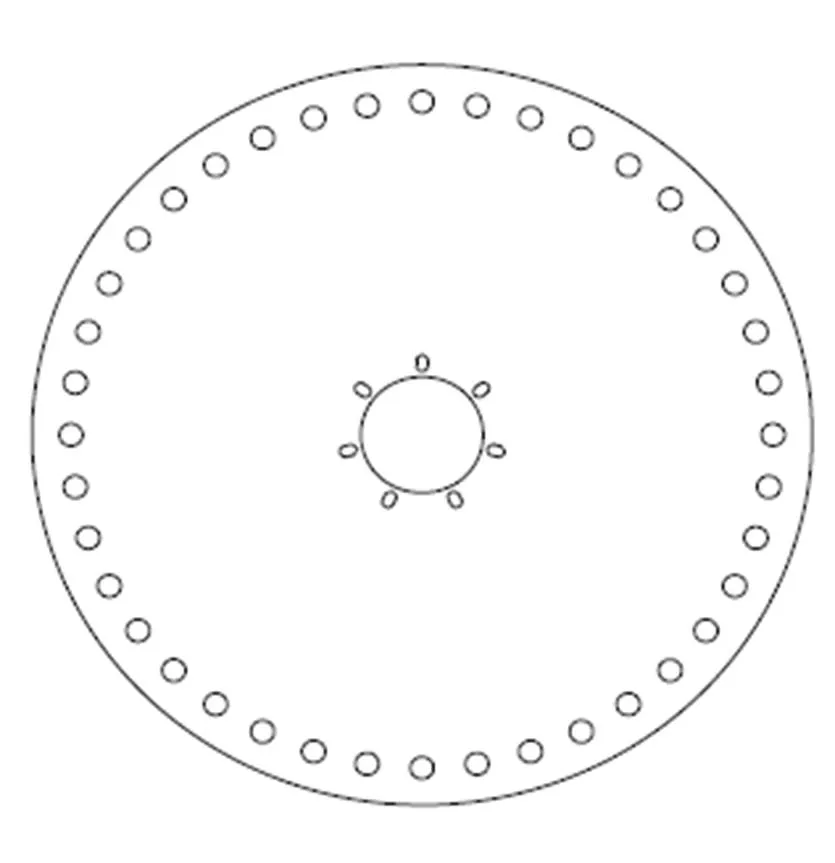
图4 编码测距盘结构

图5 编码测距盘实物
3 系统软件设计
由于陀螺仪存在漂移误差, 编码盘工作过程中也存在随机误差, 且其误差将随时间累计而越来越大. 为消除累积误差的影响, 提高定位精度, 并满足试验小车实时定位的要求, 系统采用了卡尔曼滤波算法来对激光、陀螺仪与编码盘得数据进行融合. 卡尔曼滤波算法是一种递推线性最小均方误差估计技术, 在前一时刻状态估计值的基础上, 根据当前时刻得到的测量值, 递推得到当前时刻的状态估计值, 其计算量小、速度快, 在实时性要求比较高的场合非常适用[5-8].
在设计中, 中央处理单元需对所采集的传感器的数据进行融合处理, 然后根据融合的数据对试验小车进行位置定位, 并确定其实时坐标. 定位数据获得的程序流程如图6所示.
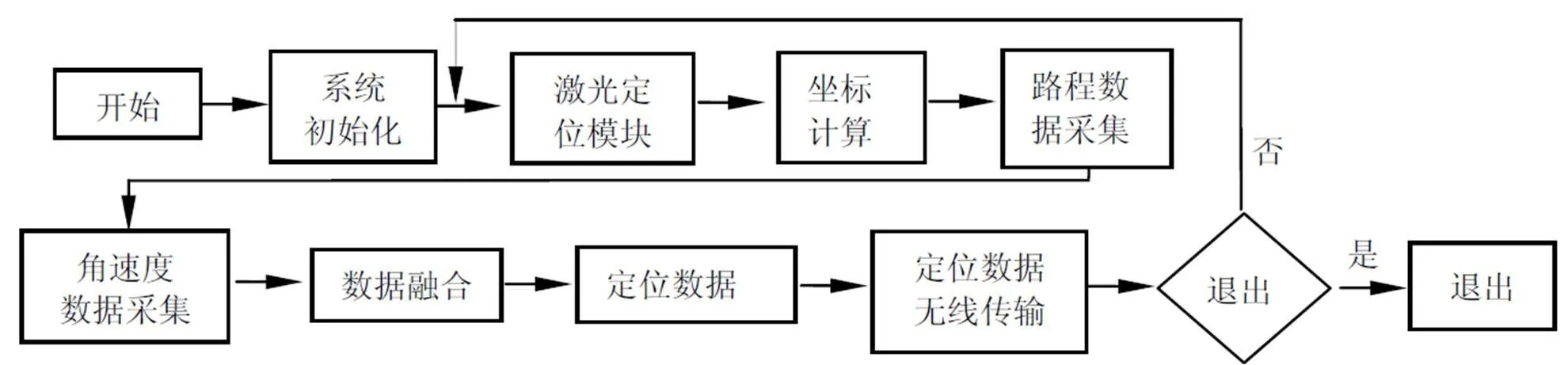
图6 定位数据获取流程
系统启动之后, 整个系统开始进行各个功能模块的初始化操作, 包括激光定位系统、编码盘模块、陀螺仪模块以及处理器内部的各个资源模块等, 让各个模块保持随时待命的状态. 系统初始化后, 中央处理单元对各传感器模块进行扫描并采集数据, 首先采集激光定位系统的定位数据并计算出定位坐标; 然后采集后轮上编码盘数据以计算当前的小车行驶路程和当前车速并保存数据, 之后再采集惯性传感器陀螺仪的数据来计算当前小车运动的角速度和角加速度等参数. 在将所有数据都采集后, 再根据卡尔曼滤波理论, 将数据进行融合处理. 该设计方案获取的定位数据可靠性好、精度高.
4 结论
为测试定位系统的精度与可靠性, 使用遥控器控制试验小车运行进行定位试验, 在50 m×50 m的测试范围内, 静态定位误差小于10 cm, 具有较高的定位精度, 能满足定位工作要求.
[1] 罗亚辉, 蒋蘋, 胡文武. 基于多传感器融合的水田耕作机械定位系统.农机化研究, 2010, 32(4): 151-154, 185.
[2] 杨联安. 我国精确农业发展策略初探[J]. 测绘与空间地理信息, 2004, 27(2): 3-5.
[3] 车艳双, 李民赞, 郑立华, 等. 基于GPS和PDA的移动智能农田信息采集系统开发[J]. 农业工程学报, 2010, 26(2): 109- 114.
[4] 吕安涛. 基于GPS/IMU的拖拉机自动驾驶方法的研究[D]. 中国农业大学, 2006: 3-10.
[5] 朱恒军, 王发智, 姚仲敏. 基于单片机的数字滤波算法分析与实现[J]. 齐齐哈尔大学学报, 2008, 24(6): 53-57.
[6] 张超. 智能车辆定位导航系统的定位研究[D]. 成都: 电子科技大学, 2005: 45.
[7] 陈晓荣, 蔡萍, 陈淑芬, 等. 卡尔曼滤波在激光跟踪测量系统中的应用[J]. 光学技术, 2004, 30(1): 98-100.
[8] Luo Yahui, Jiang Pin, Hu Wenwu, et al. Application of EKF in Laser/ Inertial Sensors Localization System[J]. ICECE, 2010, 26: 3369-3372.
The design of multi-sensor fusion location controlling system
LUO Ya-hui , JIANG Ping, HU Wen-wu
(College of Engineering, Hunan Agricultral University, Changsha 410128, China)
To realize the precise location of muddy field working machine, a multi-sensor fusion location controlling system based on laser was designed on the base of inertial sensor location. The system which based on laser, gyroscope and encoder has realized the multi-sensor fusion with the combination of Kalman filtering algorithm. The result shows that the error of static location is less than 10 cm in the measurement of 50 m×50 m.The system has achieved the expected target with such reliable location and high precision.
inertial sensors; laser; multi-sensor fusion; location; controlling system
S 24
1672-6146(2012)01-0042-04
10.3969/j.issn.1672-6146.2012.01.012
2012-03-16
湖南省自然科学基金(09JJ6091); 湖南农业大学校青年基金(09QN20)
罗亚辉(1981-), 女, 讲师, 硕士, 研究方向: 农业电气化与自动化. E-mail: hui_afangluo@yahoo.com.cn
蒋蘋(1971-), 男, 教授, 硕士生导师, 主要从事农业机械智能控制方面的研究. E-mail: teacher_jp@163.com
(责任编校:刘刚毅)
