基于雷达辐射源识别专家系统的数据融合方法研究
2012-04-25赖中安
赖中安,罗 杰
(1.解放军91404部队,秦皇岛066000;2.船舶重工集团公司723所,扬州 225001)
0 引 言
由于在现代战场上,电子战系统面临越来越复杂的战场电磁环境,各种新体制雷达参数及调制特征复杂多变。在对雷达进行识别时,过去简单的数据库匹配方法对先验知识的依赖性较强,已经很难进行正确判别。为解决这个问题,人们发展出一种新兴的人工智能(AI)技术——专家系统,它能够像人类专家一样,对接收到的复杂信号,根据经验快速推断出其可能的体制、用途及工作方式等。目前它以持久性、可靠性、稳定性以及决策可理解性等优点,已经广泛应用到军事领域,为战场指挥员提供科学、准确、高效的决策支持。
专家系统在处理问题时,所获得的信息一般是不确定的和不完全的,所使用的知识以经验为基础,属于启发性知识。根据启发性知识从一些不确定的信息推出的结论没有正确性保证,只有一定的可靠程度[1]。因此,专家系统一个很重要的任务就是综合评价结论的可靠程度,并选择可靠度最高的结论作为系统输出结果。
1 雷达辐射源识别专家系统的构造
1.1 雷达辐射源识别专家系统的结构
所谓雷达辐射源识别专家系统,就是一个人工智能软件系统,主要由人机接口、综合数据库、雷达体制子知识库和用途子知识库、知识库管理器、推理机等组成。它利用雷达分选和识别的相关知识来推理判断具有某些信号特征的雷达辐射源可能的体制、用途、型号及工作方式等。它的主要特征是有一个巨大的知识库,存储着各种已知雷达的参数特征、体制、工作状态等以及人类专家所积累的对雷达进行识别的规则及经验。而系统的控制级通常表达成某种推理规则[2]。整个系统的工作过程是从知识库出发,通过控制推理,得到所需的结论。其基本工作流程如图1所示。

图1 雷达辐射源识别专家系统基本工作流程框图
在整个辐射源识别专家系统中,最为关键的是推理机的设计。推理机是体现逻辑推理的程序,它控制和协调整个识别系统的运作,根据当前测出的雷达各个参数,利用规则库中存储的辐射源识别的知识和规则,按一定选择规则的策略进行推理判决,识别出可能的雷达型号和体制。
1.2 推理机的控制策略与推理机制
推理机的主要任务就是在问题求解过程中适时地决定知识的选择和运用,包括两方面内容:一个是知识选择的控制策略;另一个是知识运用的推理机制。
推理机的控制策略确定知识的选择和应用顺序,即决定先做什么,后做什么,并根据问题求解的当前状态分别做不同的工作。它直接影响着专家系统的效率,其选取与专家系统应用的领域特点有关。常用的推理策略有正向推理策略、反向推理策略、正反向混合推理策略等。
在雷达辐射源识别专家系统中,往往采用正反向混合推理。其基本思想为:先根据原始数据通过正向推理帮助提出假设,即从已知事实演绎出部分结果,据此选择一个目标;然后利用反向推理进一步寻找支持假设的证据,在寻找过程中又会得到用户提供的更多信息;再正向推理,求得更接近的目标,反复这一过程,直至最终得出结论。
推理机的推理机制确定具体知识的运用方法,主要包括演绎推理、归纳推理、精确推理与不精确推理等。由于各种雷达体制与其所具有的参数特征间不是严格的一一对应关系,且已收集到的知识也往往是不全面的,所以雷达辐射源识别专家系统往往采用不精确推理方法来设计推理机。
不精确推理根据启发性知识从一些不确定的证据推出的结论没有百分百的正确性保证,只有一定的可靠程度。因此不精确推理有一个很重要的任务,就是如何评价结论的可靠程度。为了解决这个问题,需要采用数据融合方法求解结论的综合置信度来衡量结果的准确性。
2 推理机的数据融合方法
专家系统的推理机在进行不精确推理时,所使用的知识和证据往往是不确定的,大部分都是具有一定的先验概率。为了保证获得最为准确的结论,需要采用各种数据融合方法来求解结论的综合置信度[3]。下面对3种常用的数据融合方法来进行分析。
2.1 确定性理论方法
确定性理论方法是一般称为CF模型。
在CF模型系统中,知识一般表示为:IFETHENH,即CF(H,E)。意思为:当证据E成立时,结论H以CF(H,E)的可信度成立。当CF(H,E)>0时,其值表示E对H的支持程度,CF(H,E)越大,结论H越真;相反,若CF(H,E)<0,则其值表示E对H的否定程度,CF(H,E)越小,结论H越假;当CF(H,E)=0时,表示证据E与结论H无关。
CF(H,E)可直接用概率值表示如下:
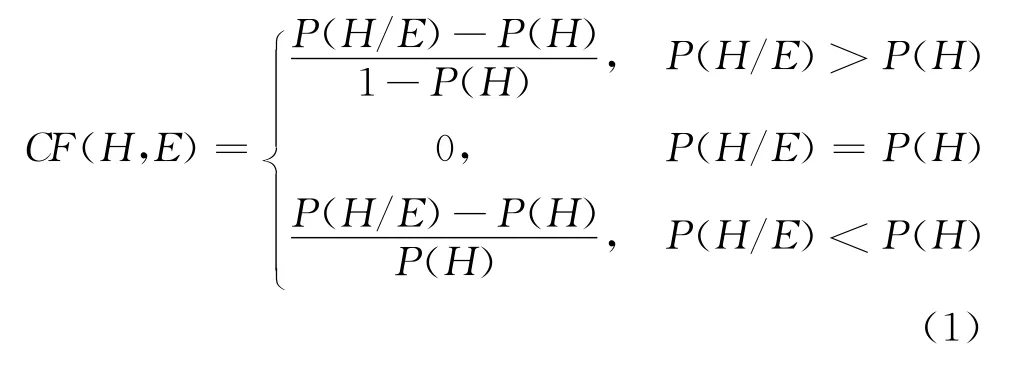
不精确推理算法的可信度可采用以下几种公式计算:
(1)依照知识前提和知识本身的可信度,计算其结论部分的可信度公式为:

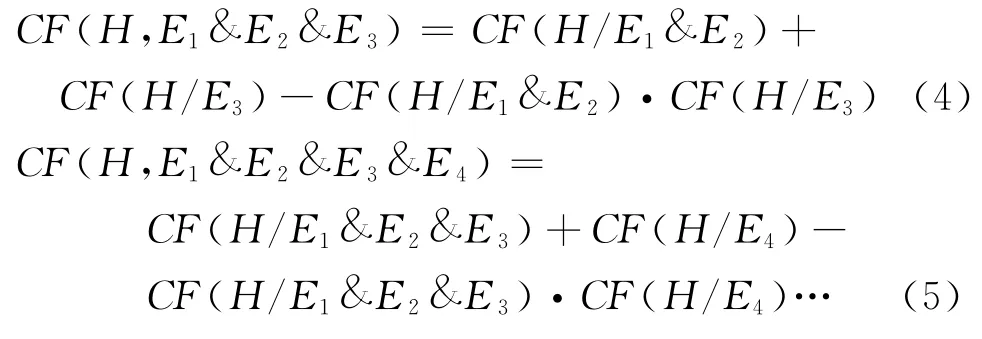
(2)组合2个独立证据导出同一假设的确定性因子计算公式。
设有2个独立的证据E1和E2,先按上式计算CF(H/E1)(记为CF1(H))和CF(H/E2)(记为CF2(H)),然后按下述公式计算CF(H,E1&E2):

(3)在组合2个以上的独立证据时,可先组合E1和E2,再将结果与E3组合,依次类推。
2.2 主观Bayes理论方法
在主观Bayes方法中,规则表示为:IFETHENH(LS,L N)。其推理过程就是根据证据E的概率P(E),利用规则强度LS和L N,把结论H的先验概率P(H)更新为后验概率P(H/E)的过程,也称为概率传播。

设独立证据E1,E2,…,En,且有规则E1→H,E2→H,…,En→H,假设H的后验概率为O(H/E1),O(H/E2),…,O(H/En),则这些独立证据的组合所应得到的假设H的后验概率为:

2.3 D-S 证据理论
D-S证据理论的基础是证据的合并和信任函数的更新,其中鉴别框架、基本概率赋值函数、信任函数是此理论的基本概念。D-S方法提出使用基本概率分配函数的正交和来计算组合规则的综合作用[4]。
定义1Θ为鉴别框架,由一完备的互不相容的陈述集合组成,Θ的幂集构成了命题的集合。
定义2 基本概率分配函数m是从ρ(θ)到[0,1]上的函数,用于描述X值的不确定性,且满足:
B(A)称为A的信任函数,表示对A及其全体子集的精确信任之和;p(A)称为A的似然函数,即对A的“不否定”程度。易证B(A)≤p(A),p(A)-B(A)表示对A“不了解”的程度。
定义4 设B1和B2是相同的框架2Θ上的信任函数,具有基本概率赋值函数m1和m2以及核{A1,A2,…,An}和 {B1,B2,…,Bn},并 假 设于是,概率赋值函数m:2θ→[0,1],对于所有基本概率赋值的非空集A,用其正交和来计算组合规则的综合作用:


对多个证据综合影响问题可依次类推,得到:

3 实例结果分析
采用以上3种方法,在输入参数有残缺的情况下,对43部各种类型雷达的参数进行推理判断,其结果统计得到识别准确率如表1所示。

表1 参数残缺时识别结果表
结果显示:SAR雷达在缺少主要参数脉冲密度(PW)的情况下,被错判为脉冲多普勒(PD)雷达;相控阵(PA)雷达在缺少主要参数脉冲重复频率(PRF)的情况下,被错判为脉冲压缩(PC)雷达。由上述推理结果分析可知,在输入参数不完整的情况下,D-S证据由于考虑到未知区域问题,推理精度较其它2种方法高,但计算较复杂,而其理论比较新颖,今后可继续改进完善;确定性理论对主观经验依赖程度较高,在规则不完善的情况下,推理效果较其它2种方法低一些,在今后进一步完善知识库规则的情况下,可望提高其识别准确率;Bayes方法计算结果介于前两者之间。
以上3种方法的优缺点综合比较结果如表2所示。
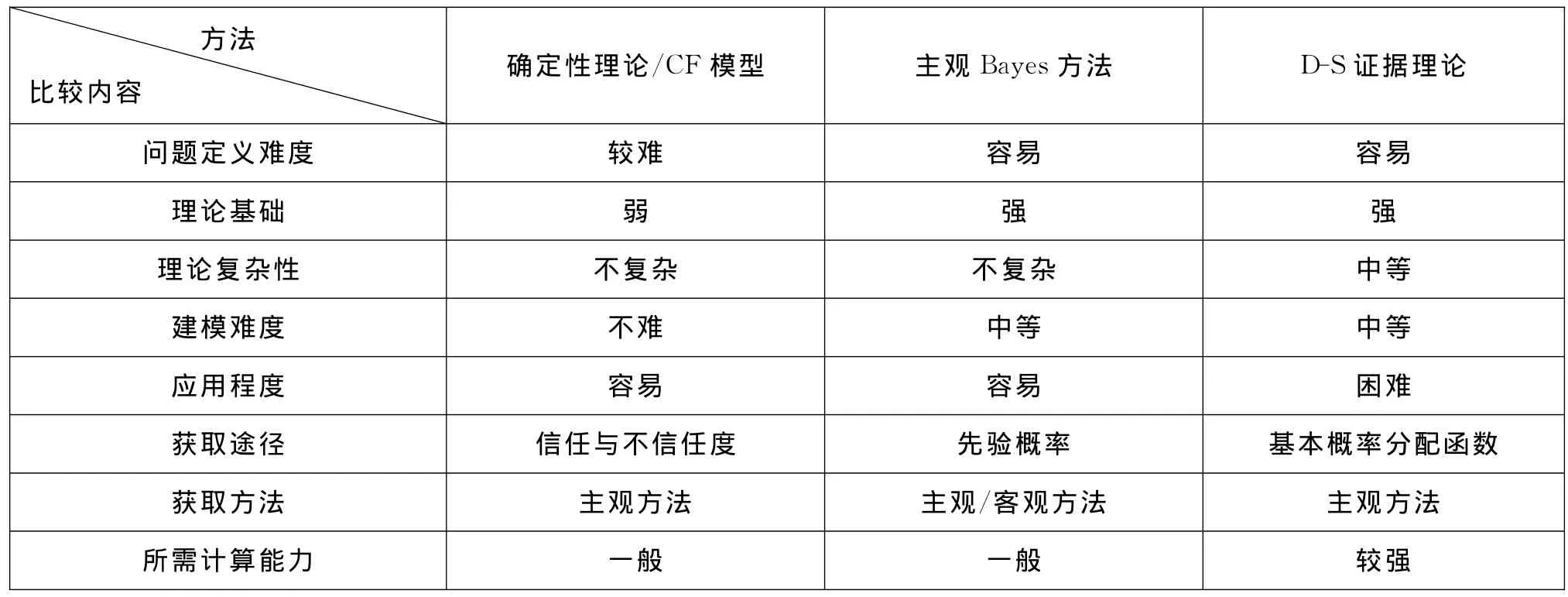
表2 数据融合方法比较表
4 结束语
采用专家系统进行雷达辐射源的识别,较传统的数据库、知识库查询方法识别效率高,其基于人类专家的经验知识,具有像人一样的智能思考方式,具有一定的实用价值。由于专家系统推理机的数据融合方法有其各自的优缺点,在研制实用专家系统时,要根据求解问题领域的特征选择一个合适的数据融合方法。当一种数据融合方法不能合理有效地处理领域问题时,需要采用多种数据融合方法有机地结合,以有效地实现问题求解。
[1]武波,马玉祥.专家系统(修订版)[M].北京:北京理工大学出版社,2001.
[2]陈锡明,祝正威.新型雷达辐射源识别专家系统的研究与实现[J].系统工程与电子技术,2000(8):58-62.
[3]尹朝庆,尹皓.人工智能与专家系统[M].北京:中国水利水电出版社,2001.
[4]吕福平.基于辐射源模型的复杂雷达信号分选与识别[D].西安:西安电子科技大学,2004.
