双转子电机驱动系统对电动汽车操纵稳定性的影响研究*
2012-04-18周斯加龙江启苏忠根
周斯加 龙江启 苏忠根 张 毅
(温州大学)
1 前言
随着对双转子电机研究的深入,其左、右转动惯量差异性对电动汽车操纵稳定性尤其是高速操纵稳定性的影响逐步被重视。文献[1]对双转子电机应用于电动汽车的操纵稳定性进行了初步探讨,但未考虑地面附着力,也未结合整车模型进行分析。本文着重分析了双转子驱动桥对车辆行驶性能的影响,尤其是其不同布置形式对操纵稳定性的影响,总结此种驱动形式在操纵稳定性方面须解决的工程问题,使得其优良特性得以发挥。
2 整车驱动模型建立
以前驱为例对双转子电机驱动系统进行简化,分析模型如图1所示。利用魔术公式轮胎模型建立整车8自由度运动模型,包括车体纵向、横向、横摆、侧倾4个自由度,每个车轮各有1个转动自由度,如图2所示。
图1、图2中,ji是第i个车轮及对应传动轴的转动惯量之和;ω1、ω2分别是左、右车轮角速度;Te是电磁转矩;ip是行星排减速比;m为车身质量;l为轴距;b为质心到后轴的距离;a为质心到前轴的距离;u为纵向前进速度;e是簧载质量质心到侧倾中心的距离;h为汽车质心到地面的距离;φ为汽车侧倾角;p为汽车侧倾角速度;Ixs、Ixzs分别为汽车簧载质量绕车辆坐标系x轴和x、z轴的转动惯量;Fxi(i=1,…,4)、Fyi(i=1,…,4)为第 i个车轮在其轮胎坐标x、y 方向上的力;Mzi(i=1,…,4)为第 i个车轮在其轮胎坐标系下的回正力矩。
根据达朗贝尔原理,x方向的力平衡方程为:
y方向的力平衡方程为:
绕z轴力矩平衡方程为:
绕x轴力矩平衡方程为:
此外:φ˙=P
由于双转子电机运行时内、外转子相向转动,所以配置的行星减速器连接方式略不同。转子通常与太阳轮连接,一侧的行星架固定,齿圈输出;另一侧的齿圈固定,行星架输出,但两侧减速比相同,以达到对内、外转子换向减速输出的目的。
3 驱动桥布置形式对操纵稳定性的影响分析
文献[1]主要讨论了双转子电机驱动桥自身的驱动特性,在变负载、变工况路面上,驱动桥可以很好地完成驱动、差速功能,但对于整车操纵性能的影响还不能确定。本文通过仿真方法分析驱动桥驱动特性对整车操纵稳定性的影响,双转子驱动电动汽车主要参数设置如表1所列。
3.1 高速加速工况分析
车辆在变速行驶时由于双转子电机内、外转子转动惯量差异引起的非稳定性会对车辆行驶造成不利影响。高速加速工况是模拟车辆在高速行驶时继续加速超车的情况,车辆初始速度为20 m/s,经过15 s加速至30 m/s后维持车速恒定,随后观察横摆角速度、侧向速度以及侧向位移等参数。仿真结果如图3~图8所示。
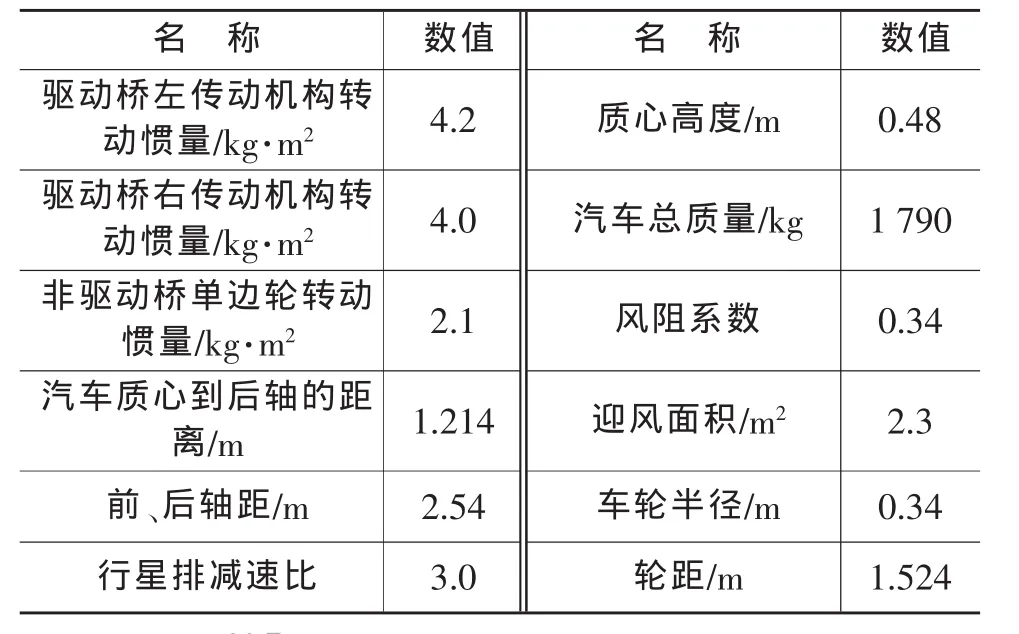
表1 双转子驱动电动汽车主要参数设置
通过图3~图8分析可知,驱动桥前、后驱动形式对车辆加速过程中的侧向稳定性影响非常接近,且前驱车型较后驱车型各参数变化幅度都较小。在没有驾驶员转向修正的情况下车辆出现了横摆角速度、侧向车速以及侧向位移不为零的情况,这是由驱动桥左、右半轴以及双转子电机内、外转子转动惯量差异造成。双转子电机外转子的转动惯量大于内转子的转动惯量,在受到同样电磁转矩推动的情况下,转动惯量大的一侧半轴必然产生较小的角加速度,即变化更加迟缓。从仿真结果的变化趋势来看,随着加速度的增加 (可以通过左右侧车轮路面滑转率得到),不稳定性也随之增大。当车辆进入匀速行驶阶段后,由于这种差异性造成的不稳定性迅速消失。以变化较大的后驱汽车为例,在车辆行驶30 s末,纵向位移为825 m,此时侧向位移仅为0.094 m,由于转动惯量差异造成的跑偏量为0.011%,远小于普通车辆平均0.4%~0.5%的水平。
3.2 低速加速工况分析
从车辆静止开始分别采用驱动桥前驱、后驱和四驱3种方式对车辆进行加速工况仿真,在10 s末车辆加速至20 m/s,随后观察横摆角速度、侧向速度以及侧向行驶位移等整车行驶参数,如图9~图13所示。
设定低速加速工况仿真时的加速度约为高速时的3.3倍,在受到比高速时更大的电磁转矩推动作用下,两侧车轮的加速性差异也较高速时更加明显。通过分析图9~图13可知,从侧向速度、横摆角速度两项指标来看,高速工况下的侧向稳定性要略好于低速工况,如高速时侧向速度最大值只有低速时的74%,高速时横摆角速度最大值只有低速时的43%,但由于高速下对侧向位移积累效应较大,所以高速时侧向位移比低速时偏大。
4 利用四驱方式减少转动惯量差异造成的不良影响
仿真结果表明,驱动桥前置或后置,转动惯量差异对车辆性能的影响同向,因此可以通过四驱形式在前后轴交叉使用转动惯量较大侧的驱动桥来减小因为这种差异所造成的不稳定因素。在高速加速工况下,通过前、后驱动桥转动惯量大小侧交叉分布的四驱车型来减少这种不良影响,仿真结果如图14~图18所示。
通过分析图14~图18可知,从纵向加速性能来看,后驱车型与四驱车型几乎无差别。从侧向稳定性指标来看,由于每一个驱动桥的侧向不稳定因素都受到另一个驱动桥的反向抑制作用,所以四驱车型侧向运动各参数变化幅度都大幅减小,行驶稳定性提高明显。从整车来看,前驱动桥内转子连接右侧车轮,产生了一个绕z轴逆时针方向的横摆力矩,而从后轴数据来看则刚好是产生一个绕z轴顺时针方向的横摆力矩,两个横摆力矩相互抵消是四驱车型侧向稳定性更好的原因。在横摆角速度、侧向速度和侧向位移3项指标中,四驱车型较前驱车型在侧向稳定性方面有显著提高,如在30 s仿真过程中,四驱车型的侧向速度最大值只有前驱车型的6.88%,而横摆角速度最大值只有前驱车型的11.2%,纵向位移最大值为前驱车型的10.4%。
5 结束语
讨论了双转子驱动桥前驱、后驱等布置形式对车辆侧向稳定性的影响,并得到如下结论:
a.在高速工况下,双转子电机驱动桥前置时对侧向稳定性的影响小于驱动桥后置。
b. 无论高速、低速工况,驱动桥对车辆侧向稳定性的影响非常微弱。
c. 对于电动四驱车型,完全可以通过前、后驱动桥交叉布置转动惯量较大的外转子以达到缩小由于转动惯量差异造成的对侧向行驶性能的影响。
d. 在设计驱动桥过程中,可通过调整附属连接部件以及加装配重等方法尽量使两侧转动惯量趋于一致。
1 罗玉涛,旷鹏,刘延伟.对转双转子电机在电动汽车上的驱动特性.华南理工大学学报(自然科学版),2008(2):7~12.
2 罗玉涛,黄向东,周斯加,等.一种车用多功能电磁差速系统.中国专利,200510100281.9.2005-10-4.
3 罗玉涛,黄向东,周斯加,等.一种油-电混合动力汽车的多桥驱动系统.中国专利,20061003386.5.2006-2-27.
4 周斯加,罗玉涛,黄向东,等.基于自适应滤波的电动汽车纵向滑移率识别方法.交通与计算机,2007(3):70~74.
5 寇发荣,马建.超车工况下高速客车操纵稳定性仿真与试验研究.汽车技术,2006(4):24~27.
(责任编辑 帘 青)