基于多信号流图和改进BHS-树的陀螺可诊断性研究*
2012-04-17王振西刘成瑞刘文静
王振西,刘成瑞,2,张 强,刘文静,2
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术重点实验室,北京 100190)
陀螺作为卫星控制系统姿态测量的核心部件,为卫星提供本体相对于惯性空间的角速率信息.本文以液浮单自由度陀螺为对象,定性地分析其可诊断性.可诊断性分析主要针对给定的对象,分析其在已知故障模式和已知测点的情况下,故障模式是否可以检测、可以分离,并给出对象的可检测和可分离的评价指标.
目前,故障的可诊断性研究主要有两个方向:基于定性模型和基于定量模型的可诊断性研究.本文采用定性模型,通过结合多信号流图[1]方法和改进的 BHS-树[2-4](binary hitting set-tree)方法的思想,给出了非常实用的故障可诊断性分析方法,本方法可以对对象进行简洁、快速、有效的评价,有利于程序仿真和验证,对新故障模式的加入和新测点的加入都有很好的包容性.此方法简洁、灵活和可扩展性好,比较适合工程的实际应用.
单自由度液浮陀螺的转子有较大的转动惯量,由三相同步电机驱动高速旋转而产生角动量,形成陀螺效应.电机安装在框架上,框架外面是圆柱形浮子,浮子密封,并完全浸泡在聚三氟氯乙烯油中以减少作用于轴承上的压力.为了使浮子的重力和浮力能很好平衡,需要对液体的温度进行控制.浮子与外壳间的软导线将电源、信号通到浮子上.浮子上装有的角度传感器,可以测出浮子相对陀螺壳体绕浮子轴的转角并转化成电信号供测量和控制使用.同时,浮子上装有的力矩器,可以根据测量结果加入相应的电流,对浮子产生绕浮子轴的控制力矩,从而实现浮子的再平衡和陀螺力矩的测量.
本文所采用可诊断性方法的基本思路,依次可分为7个步骤:1)建立对象的信号功能流图和每个模块的故障模式表格;2)建立对象故障模式与传感器测点的关联矩阵;3)利用关联矩阵对对象的可诊断性做出初步分析;4)针对关联矩阵法无法分离的模糊集,用改进BHS-树的思想进一步分离;5)对过程中的参数进行量化编码,用程序化语言来描述,便于更好地验证与分析;6)对对象的可诊断性进行评价,给出评价指标参数;7)若最后所描述的对象不是完全可诊断的,给出进一步提高可诊断性的建议.
1 陀螺的可诊断性模型
陀螺简化的功能模块的信号流图,如图1所示.图中描述了信号在各个模块的传递关系和已知传感器测点位置的信息.建立对象的功能流图的要求是:功能模块分割要清楚,模块与模块之间的接口要简单集成化,模块之间的关系要清晰、简洁,尽量减少回路.
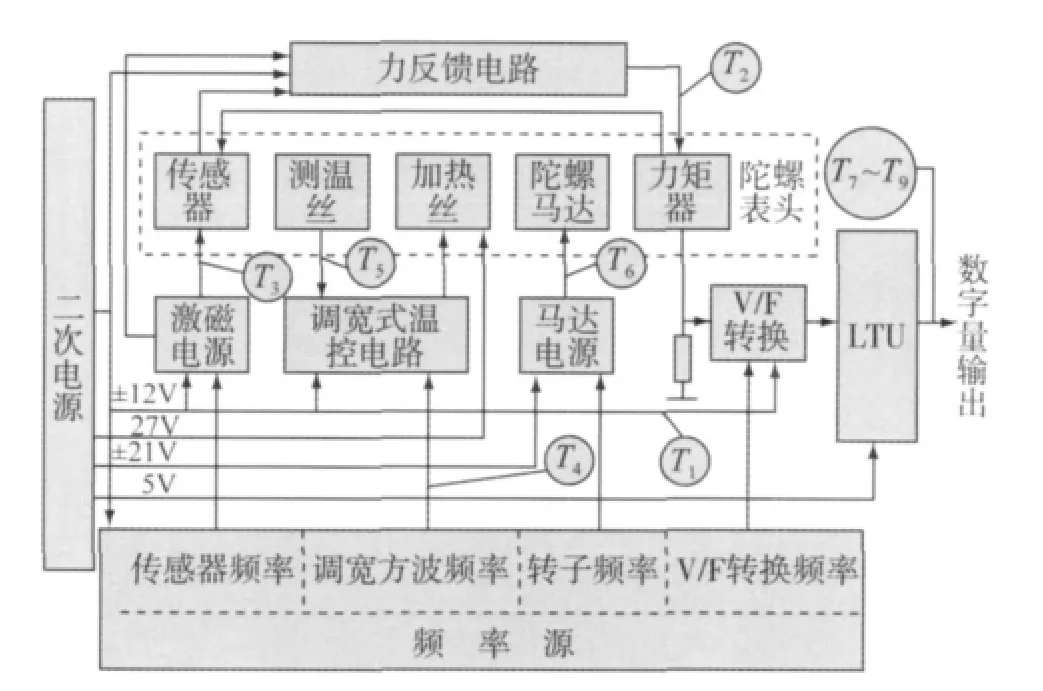
图1 液浮陀螺功能模块多信号流图Fig.1 Multi-signal flow graph of liquid-floated-gyro function modules
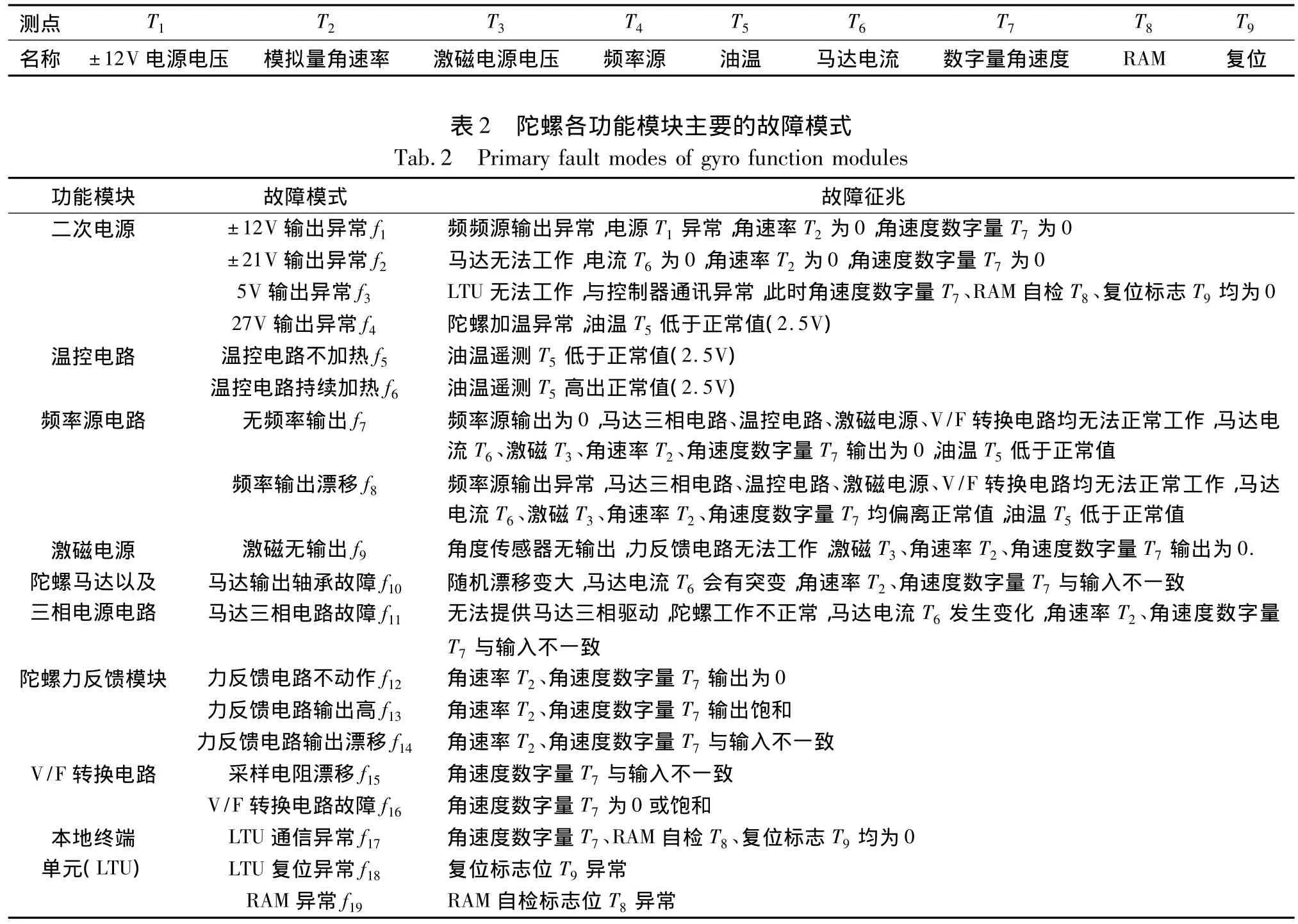
表1 液浮陀螺测点参数信息Tab.1 Paramerters information of liquid-floated-gyro testing points
表1中Ti(i=1,2,…,6)表示第 i个测点,表1给出了液浮陀螺测点所得到的信息参数.
表2给出了陀螺功能模块的故障模式fi(i=1,2,…,19),以及故障模式所对应的故障征兆.每个单元的故障模式的故障征兆描述要准确,以便后面的量化更简单和精确.
2 基于关联矩阵的可诊断性分析
从陀螺简化的多信号流图,得到故障模式与测点对应的关联矩阵,严格按照信号的传递方式,保证其准确性.由图1的陀螺多信号流图和表2所示的各模块故障模式,可以建立起故障模式与测点的关联矩阵见表3.其中关联矩阵的第i行,表示第i个故障模式在各测试点上的信息反应,1表示相关,0表示不相关;关联矩阵的第j列表示第j个测点上是否含有的故障模式的信息,含有为1,不含有为0.
关联矩阵的可诊断性判断准则,包括可检测和可分离的判断准则.
(1)可检测的判断准则
准则1:若在关联矩阵中,第i行的元素有非零数值,那么可以说故障模式fi是可检测的;若第i行所有元素值都是0,那么称为此行所对应的故障模式fi是不可检测的(即此故障模式在对像所有传感器测点上没有信息反映).
(2)可分离的判断准则
可分离的前提条件:此故障模式是可检测的.若某故障模式不可检测,那么就无从谈及可分离.在分离前可以先对关联矩阵进行化简,删除那些不可检测的故障模式对应的行.
准则2:若可检测的相关性矩阵中,故障模式fi和fj所对应得行元素不全相同,那么可以说故障模式fi和fj是可以分离的;否则称故障模式fi和fj是不可分离的.此结论从两两故障模式的可分离性分析,可以扩展到多个故障模式之间可分离性的分析.
基于上述准则1和2,对于对象可诊断性的准则描述,分析表3所示的关联矩阵,得出对陀螺故障的可诊断性结果,见表4.
表4中参数分别表示为:H={f1,f2,…,f19}是所有故障模式组成的全集;Φ表示空集;N={{f2,f10,f11},{f3,f17},{f4,f5,f6},{f7,f8},{f12,f13,f14},{f15,f16}}.
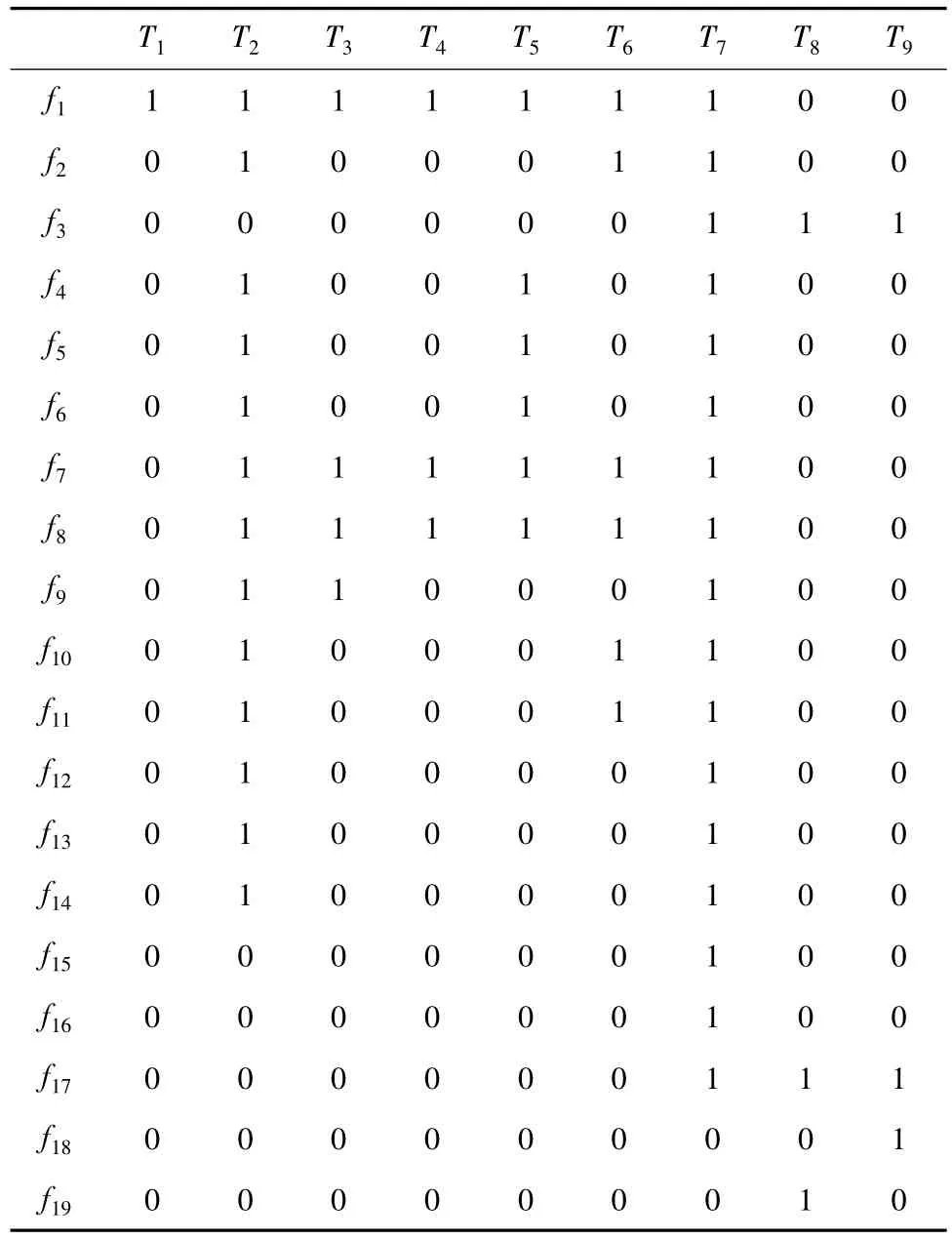
表3 故障模式与测点的关联矩阵Tab.3 The correlation matrix of fault modes and testing points
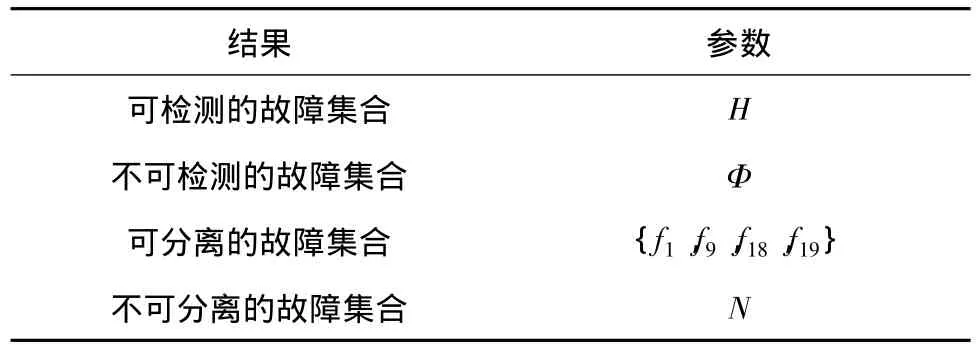
表4 陀螺基于关联矩阵的可诊断性结果Tab.4 The diagnosability data results of gyro faults based on the correlation matrix
3 基于改进的BHS-树的思想可诊断性分析
下面主要基于改进的BHS-树方法,对基于关联矩阵不可分离的故障集合,进一步分离,提高其可诊断性.
BHS-树的方法是通过建立二叉树,由根节点和叶节点组成,目标是利用求解最小冲突集簇的最小碰集的方法来实现.本文将对BHS-树的方法做出改进,在分支处直接加入故障征兆的条件进行分离,从而使故障分离更为简单直观.
改进的BHS-树分析主要分7步考虑:1)对于一个复杂的庞大的部件或系统,模糊组可能非常多,因此需要对模糊组进行优先级排序,故障的发生概率高或严酷度较大的模糊组优先进行可分离性分析;2)针对所要分离的模糊组,确定和汇总每个故障模式的故障征兆;3)对于复杂的大的对象,需要用程序化仿真验证,因此必须对故障征兆进行量化与编码,后面将详细介绍量化编码所要考虑的事项;4)利用改进的BHS-树方法,以故障征兆相异作为分支的条件,子根节点或叶节点是故障征兆所对应的故障模式;5)对所分析的模糊组,不断利用上一步进行层层的可分离性分析,直到不可分离为止;6)对分离的结果进行分类,结合关联矩阵的可分离结果,得到最终的可诊断性结果;7)对上述结果进行评价,给出度量对象的可诊断性指标.
为了具有更强的适应性,更好的扩展性,也更便于程序来求解仿真,需要对每个的模糊组里的每个故障模式的故障征兆进行准确量化编码,其具体过程为:1)若故障征兆描述为某个变量的异常,此变量理论值可以用前一段正常时间内的测量值或平均值代替,更为精准可以用卡尔曼或滑块估计的方法得到其估计值;2)有些故障征兆是偏离正常值,可以用测点的输出参数和其允许的误差上下限来衡量;3)针对“饱和”,“大于”,“小于”,“高于”,“低于”,“突变”,“偏离”,“异常”等模糊语言,根据对象的具体情况进行量化.陀螺的具体故障征兆量化编码结果见表5所示.
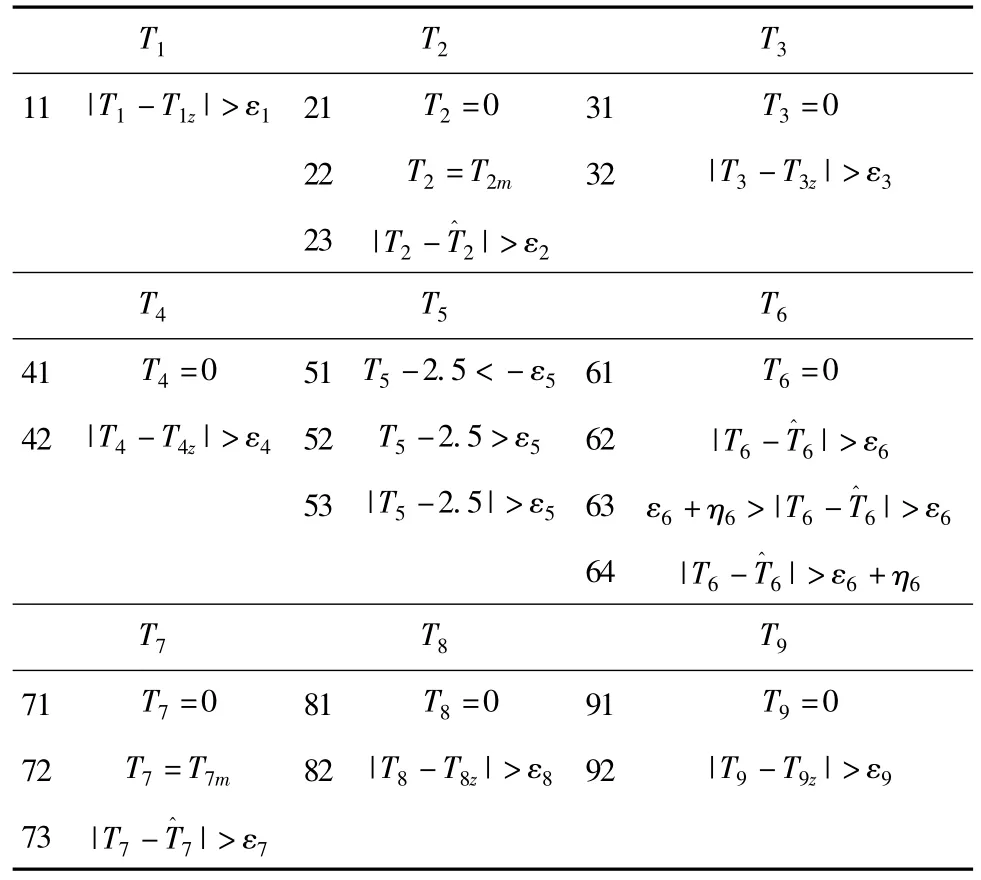
表5 陀螺测点故障征兆量化编码Tab.5 Fault symptom quantized coding of gyro testing points
表5 中,Tiz(i=1,3,4,8,9)是第 i个测点正常状态下的值;Tim(i=2,7)是对应测点处的饱和值;εi(i=1,2,…,9)是对应每个测点最大允许的偏差量;η6是衡量测点T6电流跳变时的最小偏差量;(i=2,6,7)是对应测点预估值(可用卡尔曼,滑块窗口等估计方法得到,更简单的也可以用过去一段时间平均值替代).在仿真程序中,故障征兆可以由表5中所对应的序号表示.
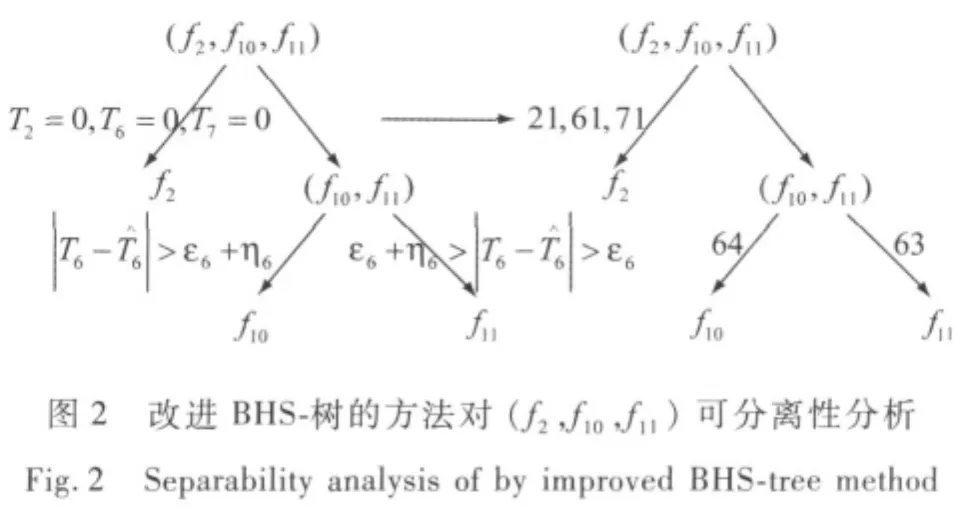
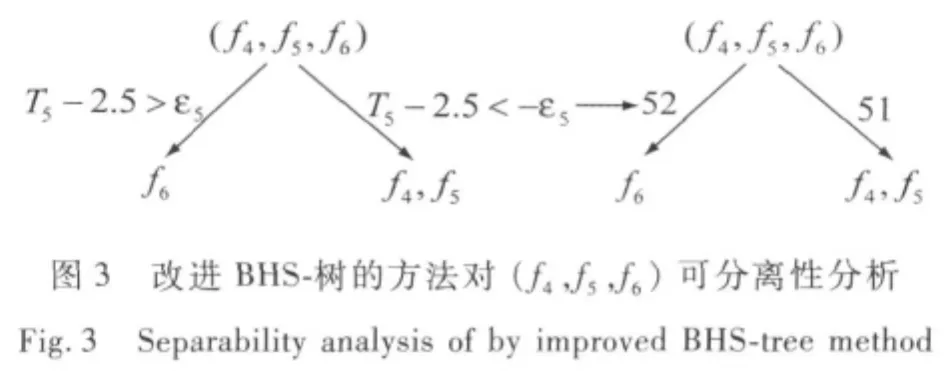
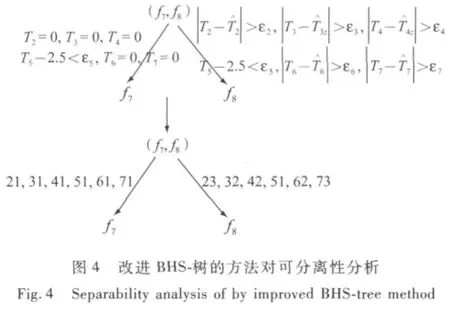
如图2具体介绍这种方法,(f2,f10,f11)是基于上一步中不可分离集合的一个模糊集,由顶至下的树形结构,在分支处加入故障征兆条件层层分离,直到不可分离为止.左边是实际的量化的分离条件的可分离性分析,右边是编码的分离条件的可分离性分析.其他模糊集分离过程见图3~6.
基于改进BHS-树的方法来进一步分析陀螺的可诊断性,其结果如表6所示.本中采用文献[5]的评价方法,评价结果见表7和表8,由结果可以明显看出此定性方法对陀螺的可诊断分析有非常好的效果.
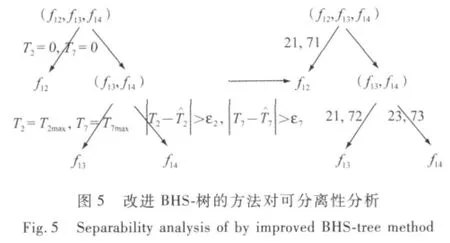
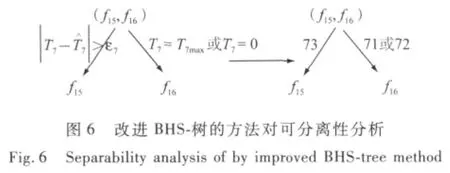
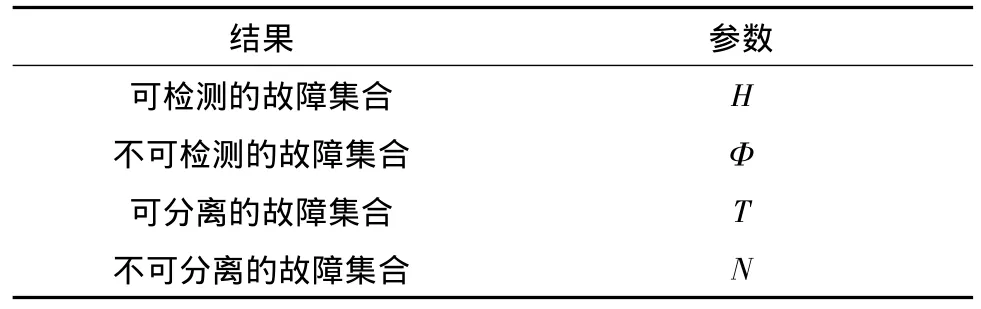
表6 基于改进BHS-树的方法可诊断性结果Tab.6 The diagnosability data of gryo based on the improved BHS-tree
表中参数分别表示为:是所有故障模式组成的全集;表示空集;T={f1,f2,f6,f7,f8,f9,f10,f11,f12,f13,f14,f15,f16,f18,f19};N={{f3,f17},{f4,f5}}是不可分离的故障模式集合.
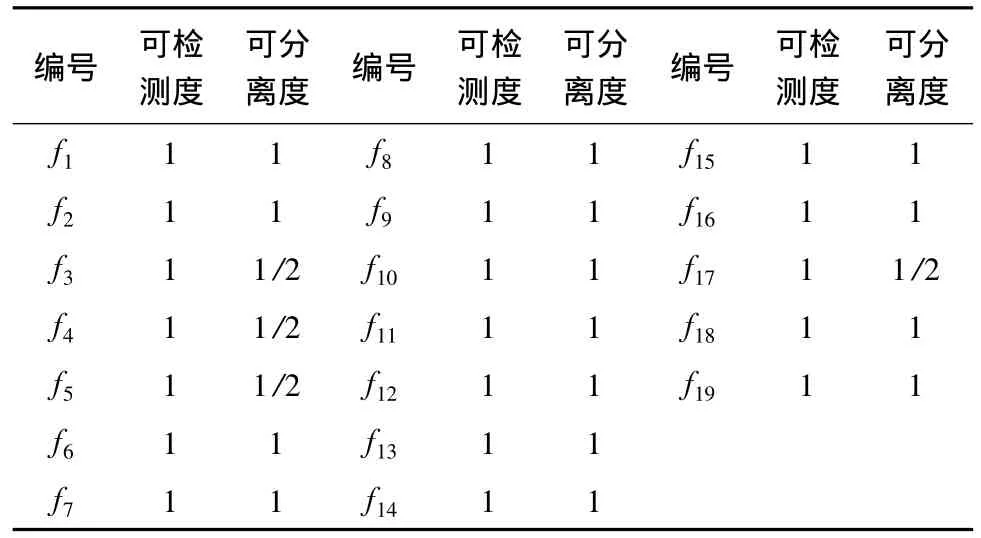
表7 陀螺故障模式可诊断性度量指标Tab.7 Diagnosability index of gyro fault modes
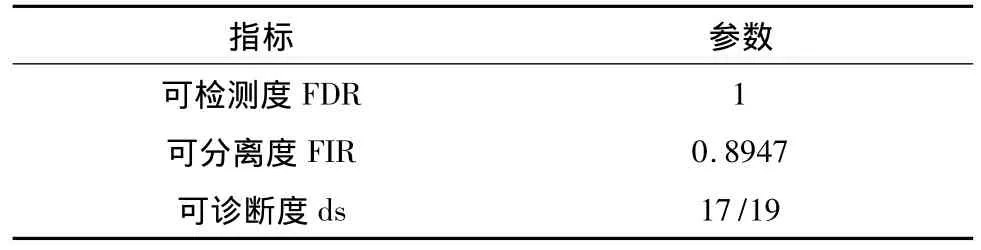
表8 陀螺可诊断性评价指标Tab.8 Gyro diagnosability evaluation index
4 结论
本文最大的创新之处,在于把多信号流图方法与改进BHS-树的思想结合起来,通过对故障征兆进行量化编码后并仿真验证,此方法对定性模型的可诊断性分析有非常好的结果,对于工程上简要的可诊断性分析具有非常重要的指导意义.
为了进一步提高可诊断性提出以下几点建议:
1)模糊集(f3,f17)可以考虑增加测点T10测量5V电压输出是否正常,模糊集(f4,f5)可以考虑增加测点T11测量27V电压输出是否正常或测点T'11用来测量调宽式温控电路对加热丝的输出是否为0,用BHS-树的思想可以实现完全的分离.
2)可以寻求其他的诊断方法[6-8]来分离,比如对陀螺内的部分模块定量描述,然后采用定性与定量相结合的方法提高可诊断性,有待于未来进一步的探讨.
3)假设故障模糊集(f3,f17)中,f17故障发生的概率远远大于f3故障发生的概率,工程上可以先按照f17故障发生来处理;若不满足要求,按f3故障处理.
本方法有待于进一步解决的问题:1)加入诊断时间约束的可诊断性分析;2)双重或多重故障下的可诊断性分析;3)怎样融合对象中有部分定量描述来提高可诊断性;4)部件与整个控制系统可诊断分析的融合问题.
[1] Deb S,Pattipati K R,Raghavan V,et a1.Multi-signal flow graphs:a novel approach for system testability analysis and fault diagnosis[J].IEEE AES Systems Magazin,1995:14-25
[2] de Keer J,Mackworth A K,Relter R.Characterizing diagnoses and systems [J].Artificial Inelligence,1992,56(2-3):197-222
[3] Wotawa F.A variant of Reiter’s hitting-set algorithm[J].Information Processing Letters,2001,79:45-51
[4] 高伟,邢琰,王南华.基于BHS-树的定性故障诊断方法.空间控制技术与应用,2011,37(2):21-25 Gao W,Xing Y,Wang N H.A BHS-tree based qualitative fault diagnosis approach[J].Aerospace Control and Application,2011,37(2):21-25
[5] 刘文静,刘成瑞,王南华,王大轶.定量与定性相结合的动量轮故障可诊断性评价[J].中国空间科学技术,2011,8(4):54-63 Liu W J,Liu C R,Wang N H,Wang D Y.Quantitative and qualitative model based fault diagnosability evaluation of momentum wheel[J].Chinese Space Science and Technology,2011,8(4):54-63
[6] IRi M ,Aoki K,O’Shima E,Matsuyama H.An algorithm for diagnosis of system failures in the chemical process[J].Computer and Chemical Engineering,1979(3):489-493
[7] Mohindra S,Clark P A.A distributed fault diagnosis method based on digraph models:steady-state analysis.Compute[J].Chem.Engng,1993,17:193-209
[8] 刘文静,刘成瑞,王南华.基于可诊断性约束的测点优化配置研究[J].空间控制技术与应用,2011,37(2):1-5 Liu W J,Liu C R,Wang N H.Fault diagnosability constraint based optimistic sensor placement[J].Aerospace Control and Application,2011,37(2):1-5
