动态数据驱动的航班延误预测研究*
2012-04-12陈海燕王建东
陈海燕 王建东 徐 涛
(南京航空航天大学计算机科学与技术学院1) 南京 210016)
(中国民航大学计算机科学与技术学院2) 天津 300300)
近10a来,国内外学者针对航班延误原因、传播模型[1]及如何减少延误[2]等问题进行了研究.目前,常用的航班延误预测方法一般采用确定性模型,势必会忽略一些重要的随机因素,如突发事件.因此,对航班延误实时预测毫无意义.
航班延误实时预测本质上是一个动态系统状态估计问题.本文将仿真领域最新研究成果——动态数据驱动应用系统(dynamic data driven application system,DDDAS)范型用于航班延误的实时预测,对连续进港航班延误波及问题进行分析和建模,基于系统状态空间模型构建了一种动态数据驱动的航班延误预测框架,并用某枢纽机场的历史航班运行数据验证该方法的有效性.
1 DDDAS应用问题
传统的系统仿真方法是将早期测量得到的静态数据输入到系统模型中预测现在或未来系统的变化.然而,由于早期测量数据并不能及时和准确的反映动态系统的实时变化情况,仿真的结果往往与实际测量结果相差甚远,导致预测失败.为此,美国国家科学基金会于2000年提出全新的仿真预测分析系统——DDDAS[3],旨在将仿真和实验有机结合起来,使仿真可以在执行过程中动态地从实际系统接收数据并做出响应,而仿真结果可以动态地控制实际系统的运行,指导测量的进行.
目前,DDDAS在交通运输领域的已有一些应用成果.Fujimoto等[4]基于一种微观城市地面交通仿真模型,根据所采集到的实时交通流数据来优化信号控制、确定当前地面交通状态及预测未来状态.Huang[5]重点研究了在轨道交通中如何在仿真过程中不断利用实测数据对预测模型进行校验以获得更精确可靠的预测输出.Wang[6]提出了一种基于随机宏观高速公路交通流模型和扩展卡尔曼滤波技术的实时高速公路交通状态估计器.在空中交通领域,Hyatt[7]给出了一种航班延误预测DDDAS框架和实时数据采集方法.
从上述研究中可以总结出,要应用动态数据驱动方法进行系统状态预测必须解决2个关键问题:(1)预测模型.根据系统行为特征建立一个可计算的预测模型,能反映系统状态之间的关系,及系统状态与可测数据之间的关系;(2)数据同化.根据模型性质确定一种数据同化算法,能将动态实测数据融合到模型预测中,达到更新预测结果的目的.
2 航班延误状态空间模型
2.1 延误问题分析
由于同一时间跑道只能供一架飞机使用,连续进港的相邻两航班之间的存在延误波及问题.在计划紧凑的情况下,若前行航班发生延误,会引起链式反应,将延误影响传播到后行航班.设飞机在发出准备降落就绪信号前产生的延误为已知的累积延误,在发出准备降落就绪信号后产生的延误为降落延误,两者之和为该航班的进港延误.设进港延误为d,降落延误为l,累积延误为a,波及延误为p,前后行飞机之间存在最小飞机间隔时间为m,两飞机间缓冲时间为b,m包含在b中,且必须得到满足.前行飞机对后行飞机的延误波及产生过程见图1.

图1 延误波及产生过程
可见,当d1大于b2和m之差时,为确保最小飞机间隔,后行飞机将产生波及延误p2,后行飞机的降落延误可表示为

式中:ε2为降落过程中由其他随机因素引起的延误.
2.2 状态空间模型
通过上节对航班降落延误问题的分析,可将系统状态空间模型表示为如下分段线性模型:

其中:式(2)为过程方程;式(3)为观测方程;xk为第k个航班的降落延误;ak为第k个航班的累积延误;bk为第k个航班的计划间隔;m为最小飞机间隔,按规定执行;yk为观测值;wk,vk为过程噪声和观测噪声;εk为随机延误.由于影响航班降落的因素较复杂,且各种因素与航班延误之间的关系很难用数学模型表示,因此,εk不能直接计算得到.这里可采用智能数据挖掘算法,从历史数据中学习到随机因素的影响模式,估计出当前情况下的εk;若遇极端情况,如空中管制、恶劣天气等,可直接参考专家意见.关于εk的计算已由另文发表[8],本文不再展开讨论.
3 动态数据驱动的航班延误预测
3.1 动态数据驱动的航班延误预测系统框架
基于状态空间模型构造出动态数据驱动的航班延误预测框架见图2.
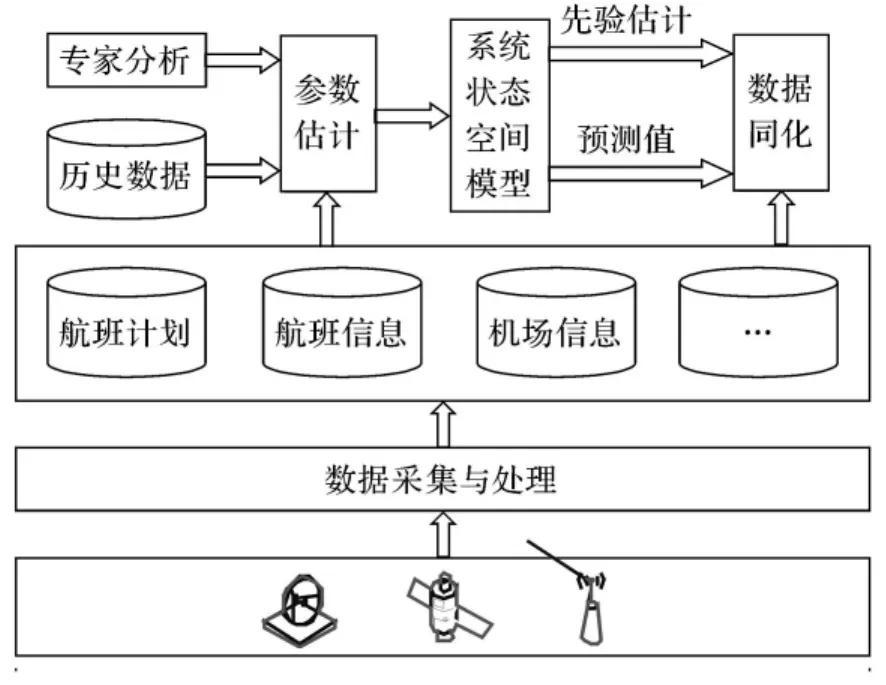
图2 动态数据驱动的航班延误预测框架
该框架由4个主要模块组成:(1)数据采集与处理模块.完成实时数据的采集和处理,为参数估计和数据同化提供输入数据;(2)参数估计模块.根据实时数据估计状态空间模型中ak,bk,wk,vk,εk等参数在当前条件下的取值;(3)系统状态空间模型.根据过程方程所描述的前后行航班降落延误之间的关系,计算出后行航班降落延误的先验估计值作为数据同化的输入;(4)数据同化模块.用实际测量的结果来更新或优化模型预测的结果,目前可用卡尔曼滤波[9]或粒子滤波[10]方法实现数据同化,前者适用于线形系统状态估计,后者适用于非线性非高斯系统的状态估计.
3.2 基于卡尔曼滤波的状态预测
1)初始化状态初值x0及其协方差P0.
2)时间更新 根据xk-1,Pk-1计算xk和Pk的先验估计


式中:Qk=Var(wk).
3)测量更新 当新的观测值yk到达时,更新xk|k-1,Pk|k-1,得到xk和Pk的后验估计

式中:K为卡尔曼增益,计算方法为

式中:Rk=Var(vk).
4)重复2),3)预测不断向前推进.
4 实验及结果分析
本文在Matlab平台上进行了一系列实验,实验数据来源于国内某枢纽机场航班运行历史记录.实验从不同角度展开,在验证动态数据驱动航班延误预测能力的同时,还验证了噪声、连续预测步数等因素对预测准确度的影响.
实验1 考察动态数据驱动航班延误预测的准确度,以及噪声方差R,Q取不同值时对预测结果的影响.图3显示了对50架连续进港航班进行降落延误预测的结果.

图3 预测结果
5组不同的经验(R,Q)值下,先验估计、预测值(后验估计)与实际观测值之间最终的均方根误差见表1.

表1 不同(R,Q)值下的均方根误差
由表1可见,融合实时观测数据能明显提高预测的准确度;(R,Q)取值对预测准确度有重大影响.
实验2 考察预测不同数量连续航班时预测准确度的变化,均方根误差见表2.

表2 均方根误差随连续航班数量的变化
从表2可以看出:连续航班数量对预测准确度的影响不大,动态数据驱动的延误预测方法有较好的稳定性.
5 结束语
本文提出了一种动态数据驱动的航班延误预测方法.该方法能在利用系统状态空间模型进行先验预测的同时,将采集到的有关航班运行过程的各种实时数据反馈到预测过程中,用于动态地更新延误预测值.实例研究证明所提出的动态数据驱动的航班延误预测方法具有较高的预测准确度,且受被测连续航班数量的影响很小.这就为机场或航空公司预测未来航班的执行、制定减少航班延误的相关决策及进一步的机场环境预测提供了有力支持.
[1]Abdelghany K F,Shah S S,Raina S,et al.A model for projecting flight delays during irregular operation conditions[J].Journal of Air Transport Management,2004,10(6):385-394.
[2]AhmadBeygi S,Cohn A,Lapp M.Decreasing airline delay propagation by re-allocating scheduled slack[J].IIE Transactions,2010,42(7):478-489.
[3]Darema F.Dynamic data driven application systems[R].NSF Workshop on Dynamic Data Driven Application Systems,March,2000.
[4]Hunter M,Fujimoto R,Suh W,et al.An investigation of real-time dynamic data driven transportation simulation[C]∥Proceedings of the 2006Winter Simulation Conference.Washington,DC,USA:IEEE,2006:1 414-1 421.
[5]Huang Y,Seck M D,Verbraeck A.Towards automated model calibration and validation in rail transit simulation[C]∥Procedia Computer Science1,2010:1 259-1 265.
[6]Wang Y,Papageorgiou M,Messmer A,et al.An adaptive freeway traffic state estimator[J].Automatica,2009(45):10-24.
[7]Hyatt R,Bansal D,Chakraborty S,et al.Flight cast-an airline flight delay predicting DDDAS[C]∥Proceedings of 2007International Symposium on Distributed Computing and Application to Business,En-gineering and Science.Wuhan China,Hubei Science and Technology Press,2007:85-88.
[8]Chen H Y,Wang J D,Xu T.Modeling of flight delay state-space model based on genetic EM algorithm[J].Transactions of Nanjing University of Aeronautics & Astronautics,2011,28(3):276-281.
[9]Kalman R E,Bucy R.New results in linear filtering and prediction problems[J].Journal of Basic Engineering,1961,83(1):95-108.
[10]Bølviken E,Acklam P J,Christophersen N,et al.Monte carlo filters for non-linear state estimation[J].Automatica,2001,37(2):177-183.
