一种集洗扫拖于一体的新型轻便垃圾清扫车*
2012-04-12张争艳胡吉全陈定方李涛涛陆宁洲
张争艳 胡吉全 陈定方 李涛涛 陆宁洲
(武汉理工大学物流工程学院 武汉 430063)
0 前 言
大学生集体宿舍、旅游景点(公园等)、居民小区、公共场所等大量人们聚集的地方,会产生大量的各色各样的垃圾,垃圾清扫工作仍停留在人工清扫、使用传统的扫把、拖把等人力工具的层面上,清扫工具没有实现自动化,使得工作效率低,人力资源浪费,工作强度大,长期人力接触大量的垃圾对清洁人员的精神也形成了巨大的挑战.工具不能自动化、作业强度大、效率低,给人们的旅游、生活带来严重的影响[1-2].
目前市场上清扫机械的品种很多,但功能单一,不能够清除所有垃圾杂物,有的甚至连基本垃圾都不能进行很好的清扫.部分抽气型清扫机使所谓气体在清扫机械内形成空气对流,但实际上对浑浊空气没有进行废气处理,对环境形成了二次污染.
针对上述问题,设计出一种可进行自动扫地、拖地的清扫机.该道路清扫机采用创新机构,具有结构简单、成本低廉、维修方便、持续工作能力强、清扫效率高、低噪声作业等特点,是无污染的绿色环保机械.
1 整机机构设计
本清扫机主要由扫地机构、拖地机构、翻斗机构组成.其中扫地机构与翻斗机构由电机提供回转动力输入,协调运作,用机械模仿人工扫地时的动作过程,实现对垃圾的清扫与临时存贮.拖地机构应用多滚筒带传动的方式对地面进行水拖,车前进时,依靠拖布与地面间的摩擦力被动传动来实现清洁.整个车体既能依靠人力推动前进,也可以实现自动前进.图1为清扫车的整体外观各向视图.

图1 扫拖车整体外观
1.1 扫地机构
该机构的组成部件见图2a).扫地机构的原理为演化的平面四连杆机构,见图2b).其中连杆上端点轨迹中一段为近似直线,此阶段为扫把的清扫阶段.原动件为大齿轮,由电机对其直接输入动力.
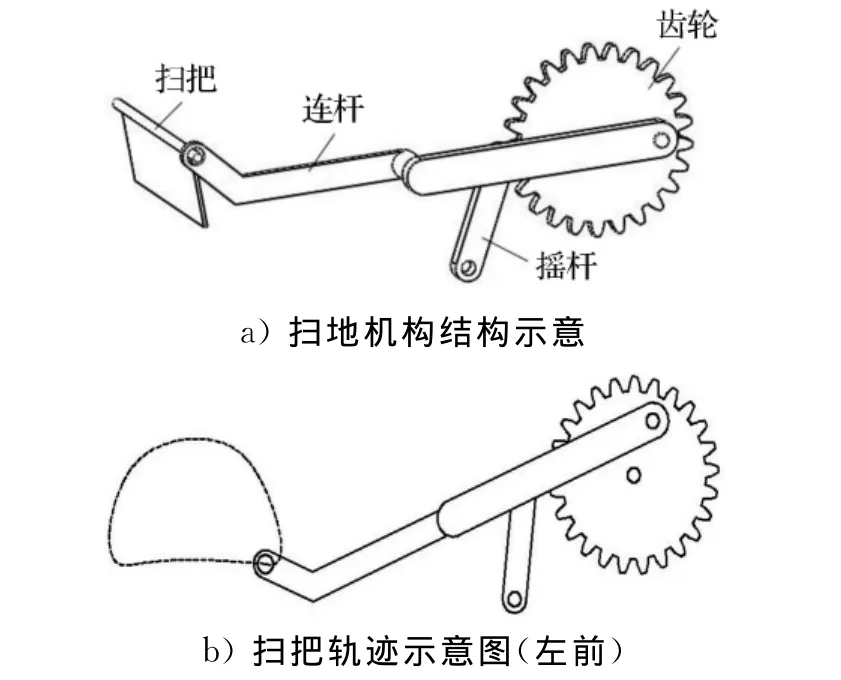
图2 扫地机构设计
1.2 翻斗机构
翻斗机构结构示意图见图3b),圆盘与导轨组成间歇机构,间歇行程占圆盘转动的1/2周期,在另一T/2的工作周期内,该装置可看作正弦机构与滑块摇块机构的串联.其中圆盘轴线与转动滑块轴线位置与机架固定,半圆导轨由于收到机架的约束只能进行上下往复运动.
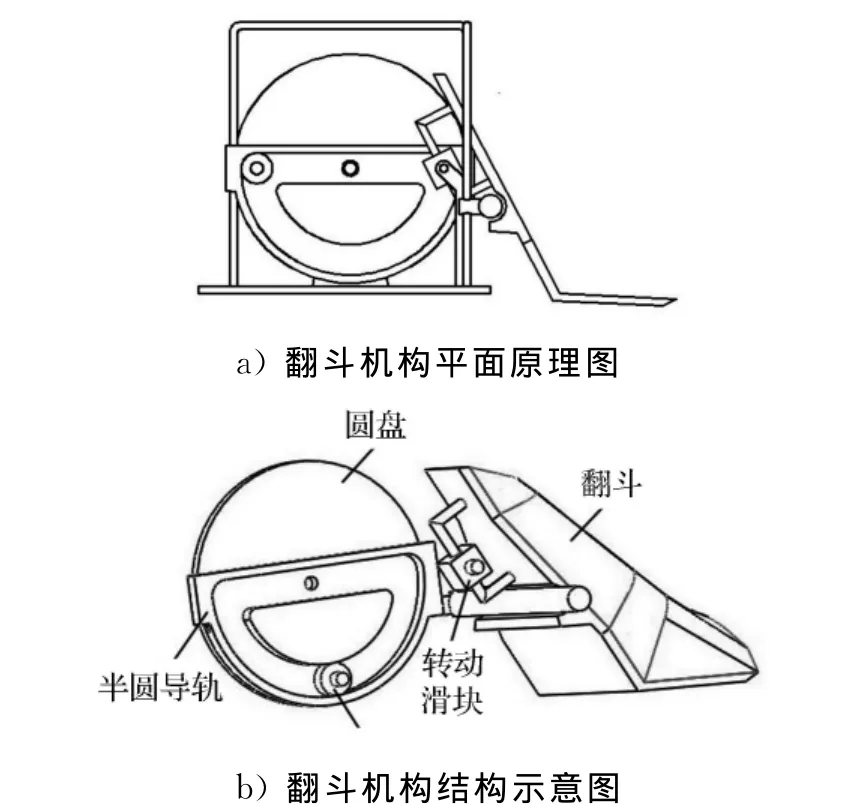
图3 翻斗机构设计
1.3 拖地机构
组成部件为水箱、6个滚筒和拖布,见图4.清洗面与地面接触由摩擦力带动进行传动.水箱内可装设滤网、清洁刷等对拖布进行清洗.
1.4 其他辅助装置
1.4.1 垃圾箱 垃圾箱(见图5)位于车体中部,可以横向抽出,进行倾倒,转置垃圾.
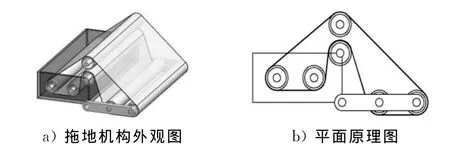
图4 拖地机构外观图及平面原理图
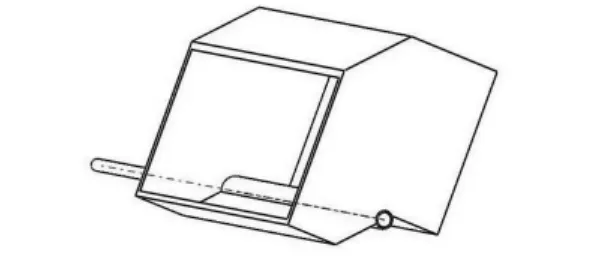
图5 垃圾箱示意图
1.4.2 斜坡,挡板 车头有斜坡挡板装置(见图6),斜坡背面与翻斗前沿紧密接触,保证能够将垃圾顺利地从斜坡扫入翻斗.斜坡的前面具有一定倾角,弹性贴地,在扫把清扫间期,能推动垃圾随车前进,防止在翻斗上翻期间有垃圾遗漏的现象发生.斜坡两侧的挡板的距离可调,作用是适应不同宽度路面的清扫,实现对路面上的垃圾聚拢,提高清洁效率.另外,整车采用单侧动力传动,通过合理调节右挡板的位置,可使其贴墙作业,能够实现对紧贴墙边的垃圾的清扫.
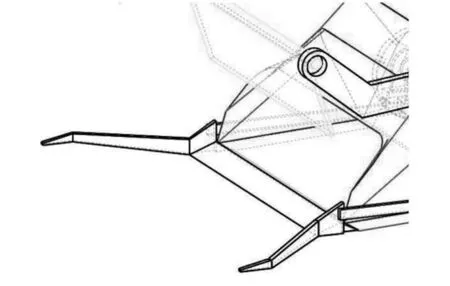
图6 斜坡,挡板示意图
2 多机构协调运作的工作原理
2.1 整机多机构协调工作
圆盘与齿轮同轴,转动比为1∶1.图3a)所示位置为单周期周期的起点,0~T/2周期内,圆盘与半圆导轨无相互作用,翻斗静止不动,扫把在此期间完成近似直线运动的扫地动作(扫地动作用时小于T/2).T/2至3T/4时间内,圆盘滚子与半圆导轨作用,翻斗轴上升,在摇块作用下翻转,将垃圾倾倒入垃圾箱.3T/4至T内,翻斗的运动可看作T/2至3T/4时间内运动的逆运动.在周期末T时刻扫把复位至起始处.此后重复上述运动.整机工作流程图见图7.
2.2 清扫垃圾工作工程

图7 整机工作流程图
如图8所示,齿轮3在小功率电机的带动下绕齿轮中心轴6做旋转运动,齿轮3和电机中间连接有微型的减速机,以降低齿轮3的旋转速度,旋转的齿轮3通过端面的定位销5将运动传递给清扫连杆7,清扫连杆7的运动迫使回转支撑杆2绕铰接点作摆动,如此,清扫连杆7会在回转支撑杆2的配合下以一定的规律运动,通过合理的结构设计使其最前端安装的扫把1的运动轨迹在某一时间段近乎直线,在该时间段,扫把1贴近地面进行垃圾的清扫工作,此过程,垃圾汇拢U形挡板8将扫把1清扫到的垃圾逐渐汇拢,防止垃圾的外溢.而在齿轮旋转1周的其他时间内,扫把1的轨迹呈现弧线,完成离地抬升然后再前伸落地动作,此时间段,扫把1完成离地提升过程,与此同时,接收垃圾并翻车倾倒垃圾模块恰好完成翻车倾倒垃圾作业,与上述过程的清扫作业完美的配合.
2.3 接收垃圾并翻车倾倒垃圾工作过程
如图8所示,圆盘11和齿轮3并列靠近连接在同一根轴上,并做同步旋转运动,圆盘定位销9固定在圆盘11上,随圆盘一起旋转,当圆盘定位销9旋转到下半周时,此时其轨迹与半圆弧槽连杆12上的半圆弧吻合,半圆弧槽连杆12静止不动,当旋转到上半周时,带动半圆弧槽连杆12在水平面滑杆10和垂直面滑杆13上运动,此时,翻斗15受到半圆弧槽连杆12向上的作用力,并在其顶部圆筒活动铰链14的约束下进行翻车作业.

图8 整机CAD总装图
3 基于Solidworks与3Dmax的工作过程仿真
3.1 整机模型的建立
产品的总体设计过程主要包含总体方案设计、性能优化与仿真、结构特征建模、分析评价四个部分[3].因此,完成整机机构设计后有必要对其进行仿真分析,以便优化分析设计结果.
在三维建模软件Solidworks中建立扫地机构、翻车机构、拖地机构等各个组成部分三维模型,并进行整机的虚拟装配完成整机虚拟样机.虚拟装配前可以考虑2种方案:直接插入零件完成整个装配过程、先完成需要的子装配体,插入子装配体完成整个装配.选用方案时因人而异,装配前考虑方案的优化对装配完成后的后期工作有很好的帮助.
3.2 工作过程仿真结果
利用三维CAD软件,不仅可以生成形体逼真的机械零部件造型,还可以利用其丰富的二次开发手段实现按照一定规律变化实体的参数化建模[4].
将建立的虚拟样机导入3Dmax中进行工作工程仿真;Solidworks软件与3Dmax软件有很好的数据传送接口,Solidworks文件可以保存为IGES格式(不出现中文名和路径)、STL格式、VRML格式等,其中,以VRML格式导入可以得到很好的结果.在3Dmax中设置部件之间的联动关系、关键帧、仿真时间等,即可进行机构的运动仿真[5].本作品在楼道环境下基于Solidworks与3Dmax的仿真结果如图9所示.图中展示了从发现垃圾到逐渐清扫直至完全清扫的全过程.
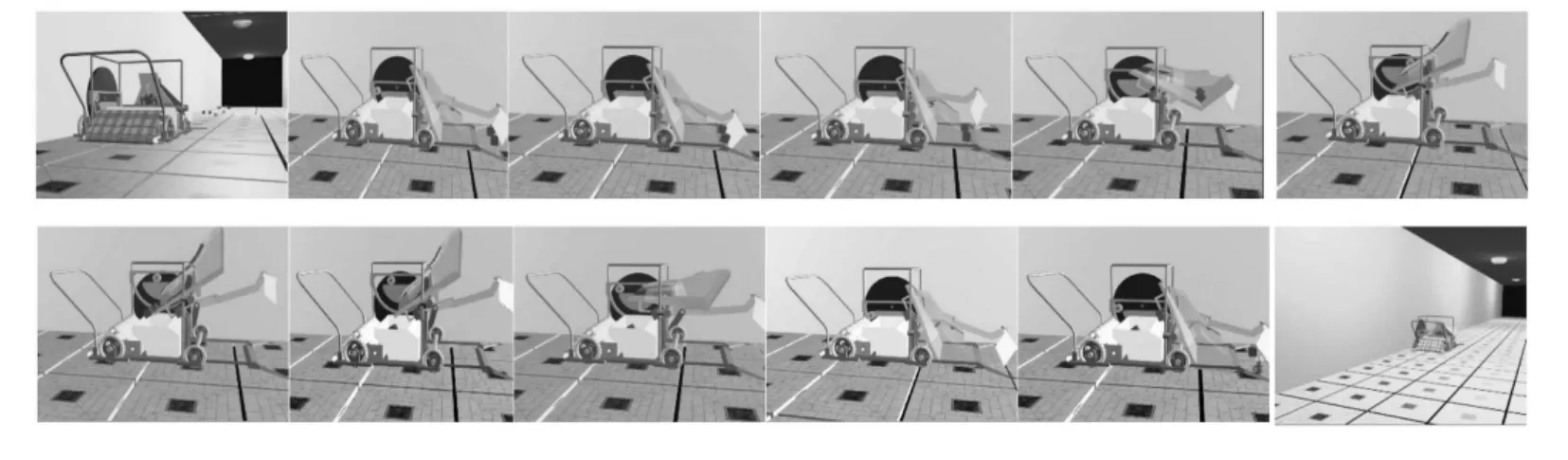
图9 整机工作仿真结果
4 结束语
通过对整机的建模、仿真分析、样机试制等工作,可以得出该新型扫拖推车具有以下优点:
1)机械化、自动化程度、工作效率高.针对四杆机构的混合驱动特点,结合机器控制技术和方法,实现机器在工作时的机械化、自动化.
2)操作简单,应用范围广.按下电动机按扭,机器便可进行自动清扫,自动实现垃圾向大的垃圾箱转移;拖地装置全自动拖地、洗抹布,省时省事.此机器体积小,质量轻,运作灵巧,适用于小区、学校宿舍过道、广场等人流较大、人工维持环境较难的公共场所.
3)成本低廉,使用寿命长.保证使用寿命的前提下,采用塑料材料制作,成本明显降低,能满足更为广泛的消费人群.
[1]Editor.中国高校在校生人数超2700万[EB/OL].[2009-05-11]http://www.gg-px.com/n.aspx/id=15684.
[2]梅州电台.公共场所乱丢垃圾现象严重,呼吁市民养成文 明 习 惯 [EB/OL].[2009-07-23]http://www.gdmztv.com/radio/dtxw/2009-07-29/1248849717d-11220.html.
[3]张争艳,陈定方,刘 李.基于特征建模技术的双级减速箱的虚拟设计[J].湖北工业大学学报,2008(3):46-48.
[4]魏国前,陈定方,罗会信,等.基于三维CAD的转炉倾动力矩计算与仿真[J].武汉理工大学学报:交通科学与工程版,2009,33(3):537-540.
[5]腾龙视觉设计工作室.3Dmax7中文版动画技术案例精解[M].北京:科学出版社,2005.
