基于小波包分解和滑动功率谱的舰船轴频电场信号检测
2012-03-24包中华于仕财龚沈光
包中华,于仕财,龚沈光
(1.海军航空工程学院电子信息工程系,山东 烟台 264001;2.海军工程大学兵器工程系,武汉 430033)
舰船的不同金属结构在海水中会因电化学作用而产生腐蚀电流。同时,为了防止船体的腐蚀,人为外加的主动或被动的阴极保护系统也会在海水中产生电流。当舰船处于航行状态时,由于转动轴系接触电阻的周期性变化,这些电流会在海水中产生以螺旋桨转动频率为基波的极低频电磁场,称为轴频电场[1-2]。近些年来由于消声技术的迅速发展,声探测面临诸多新挑战。各种非声探测技术在国外开始得到广泛的研究和应用,基于轴频电场的水下目标探测技术就是其中的一个重要方面。研究表明,该电场具有足够的强度,难以人为地消除或隐身,并且信号线谱特征明显,可以成为水中探测的理想信号源之一[3]。
由于海洋环境变化的复杂性和海水对电磁波的强衰减作用,轴频电场信号检测算法需要在弱信噪比条件下稳健地检测目标。文献[4-5]采用基于功率谱估计的舰船电场信号检测方法,提取目标的时频特征,结合自适应门限调整,较好地解决了复杂海况下轴频电场信号检测问题,其缺点是需要一定的信噪比。为了提高检测微弱舰船轴频电场信号的能力,文献[6-9]分别提出基于高阶统计量、自适应线谱增强器、负熵和小波包熵的信号检测方法,这些方法能够在一定程度上降低有效检测的信噪比下限,但是当噪声相关性或是非高斯性过强时,这些方法的效果都会不同程度地变差。
本文将小波包分解和滑动功率谱检测技术结合起来,提出一种新的轴频电场信号检测方法。首先,使用小波包变换对观测信号进行多子带分解;然后,分别在各子带对信号进行滑动功率谱检测。该方法既继承了滑动功率谱检测稳健性强的优点,又显著地降低了检测对信噪比的要求,适合在复杂海况下对远距离目标进行探测。
1 信号模型
舰船轴频电场是由于螺旋桨转动调制腐蚀或腐蚀防护电流发生周期性脉动,从而在海水中产生的以螺旋桨转速频率为基波的极低频电磁场。图1所示为实测信号和噪声的时域波形和归一化功率谱。
轴频电场信号具有稳定的线谱特征和良好的谐波结构(其谐波成分来源于螺旋桨叶片的调制);而以海洋环境电场为主的背景噪声在频域上则没有这种持续稳定的线谱特征。
记观测信号为

式中,v (n)为平稳的加性噪声,均值为0 并且与s (n)统计独立。
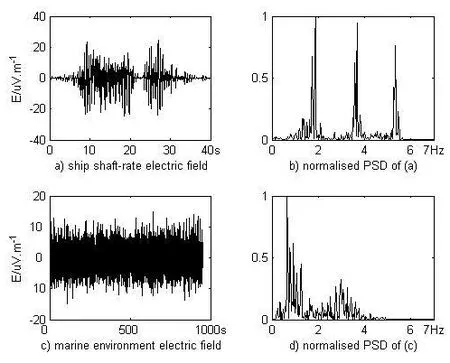
图1 实测信号及噪声
使用谐波模型来描述舰船轴频电场信号,

式中:ak、ωk和ϕk分别为信号的幅度、频率和相位,并且假设ak、ωk为未知常量,相位ϕk为独立同分布的随机变量,服从[0,2π)区间上的均匀分布。
2 基于小波包分解的信号检测方法
2.1 小波包分解
小波包分解是从小波分解延伸出来的一种信号分析方法。相比于小波分解,其对细节空间也同样进行剖分,因而较小波分解具有更加精细的信号分析能力,更能提取信号的高频特征。
定义小波包函数为由尺度函数φ (t)确定的函数族{un(t);n=0,1,2,…,+∞},其满足如下的双尺度方程[10]:

式(3)中:u0(t)为尺度函数φ (t);u1(t)为小波函数ψ (t);k为采样点序号,k=1,2,…,K,K为信号总采样点数;{hk;k ∈ Z}和{gk;k ∈ Z}是一高低通组合正交镜像滤波器组,信号通过该滤波器组进行二抽一采样,以实现对尺度空间和细节空间的等频带划分。
2.2 方法原理
轴频电场信号的特征频段一般为1~7 Hz,在没有目标出现时,观测信号在该频段内能量变化比较平稳且其值较小,而在信噪比较高的条件下,在目标通过期间,观测信号在该频段内的能量会稳定而显著地增加。基于此,可以实时地估计当前固定长度观测信号的功率谱值,提取特征频段内观测信号功率谱值之和作为特征量,使用浮动门限,对目标进行滑动检测。然而,在信噪比较低时,目标出现前后特征频段内信号能量变化不明显,基于滑动功率谱估计的信号检测方法无法有效地检测到目标。
舰船轴频电场信号具有良好的线谱特征和明显的谐波成分,其能量主要集中在轴频及其谐波频率所在的几个比较窄的子带中,而海洋环境电场在轴频频段上却没有这样的特征。为了进一步提高低信噪比条件下的信号检测能力,根据轴频电场与环境电场在频域上的特征区别,利用小波包变换对观测信号进行多子带分解,然后再分别对各子带信号进行滑动功率谱检测。经多子带分解后,在信号能量所集中的几个子带中,信噪比得到了大幅的改善,对其进行滑动功率谱检测可以取得较好的结果。而其他子带信号的主要成分为环境电场,不论目标出现与否,其能量变化较平稳,结合使用浮动门限技术,检测也不易产生虚警。此外,多子带分解和检测还有效地利用了轴频电场信号的谐波特性,通过综合评判各子带的检测结果,可以有效提高检测结果的可靠性。
2.3 算法实现
取数据窗长度为N,为了便于进行后续的信号处理,一般取N为2的整数次幂,记n (n>N)时刻的观测信号为x(n)=[x (n),x(n−1),…,x(n−N+1)]T,其中,x (n)为n时刻的传感器输出值。
信号检测的具体步骤为:
1)从N+1时刻起,使用小波包变换对观测信号x (n)进行多子带分解,分解的最大尺度为J,则在尺度J 下观测信号被分解为2J个子带信号,记第m个子带信号为其中,
2)使用直接法分别求取各子带信号的功率谱,分别提取各子带的功率谱值之和作为检测特征量,记n时刻第m个子带的检测特征量为Fm(n)。
3)由于直接法估计功率谱方差性能较差,因而需要对检测特征量Fm(n) 进行平滑。平滑的实现方法为使用低通滤波器对Fm(n) 进行滤波。考虑到舰船通过特性信号的频率不会高于1 Hz,因而,将低通滤波器的截止频率设置为1 Hz。
4)取检测窗长度为M,从 n=N+M+1时刻起分别在每个子带独立地检测目标。检测时使用浮动门限,取第m个子带的门限为其中,u为门限因子,一般可在3~8之间取值,为前M个时刻第m个子带检测特征量的平均值。
浮动门限的使用可以有效提高检测方法的抗干扰能力,这对于在复杂多变的海洋环境中检测目标是非常有用的。T和u的取值应根据信噪比情况适当选取,在信噪比较高时,应设定较大的T和u,以降低虚警;反之,在低信噪比条件下,应适当降低T和u,以提高检测的灵敏度。
3 算例
为验证方法的有效性,并定量分析比较不同信噪比条件下本文方法与滑动功率谱法[8]的性能差异,分别使用实测数据和仿真数据对上述2种方法进行检验。
用于检验的实测数据源于我国东海某海域进行的海上测量试验。测量设备由水下测量体和岸上主机2部分组成,采用Ag/AgCl 电极作为传感器,水下测量体由PC104 工控机控制,实时采集、存储轴频电场信号,并根据指令向岸上主机发送测量数据。采样频率为250 Hz,信号检测时将其降为25 Hz。使用GPS 对测量体和运动船只进行定位。
2种检测方法的主要参数设置如下:对观测信号进行3层正交小波包分解以得到8个子带信号,分解时使用的小波包函数为db3 小波,每隔0.2 s检测一次。检测时,取数据窗长为N=256,检测窗长为M=1 000,门限因子u=3,T=2。
3.1 实测数据处理结果
图2所示为某中型船通过时传感器记录的观测信号。测量时该目标艏艉通过与传感器距离最近点的时刻分别为80 s和110 s 左右。
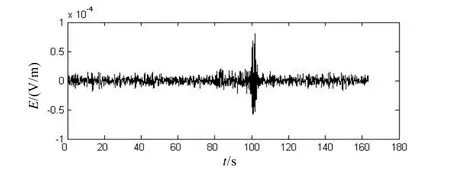
图2 某中型船实测观测信号
滑动功率谱法的处理结果如图3所示。使用本文方法处理该实测数据,有3个子带(子带5、6、7)检测到目标,其检测效果分别示于图4a)、b)、c)。图4中检测特征量出现负值,这是平滑时使用了低通滤波的结果。

图3 滑动功率谱法检测效果
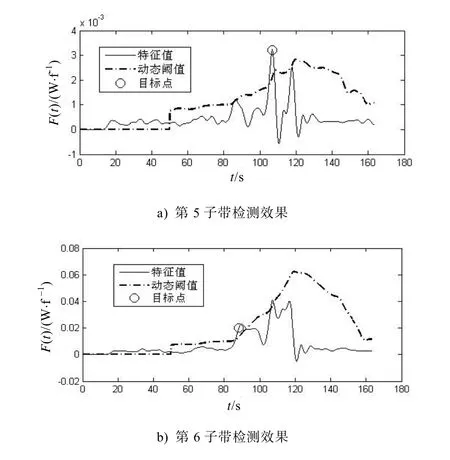
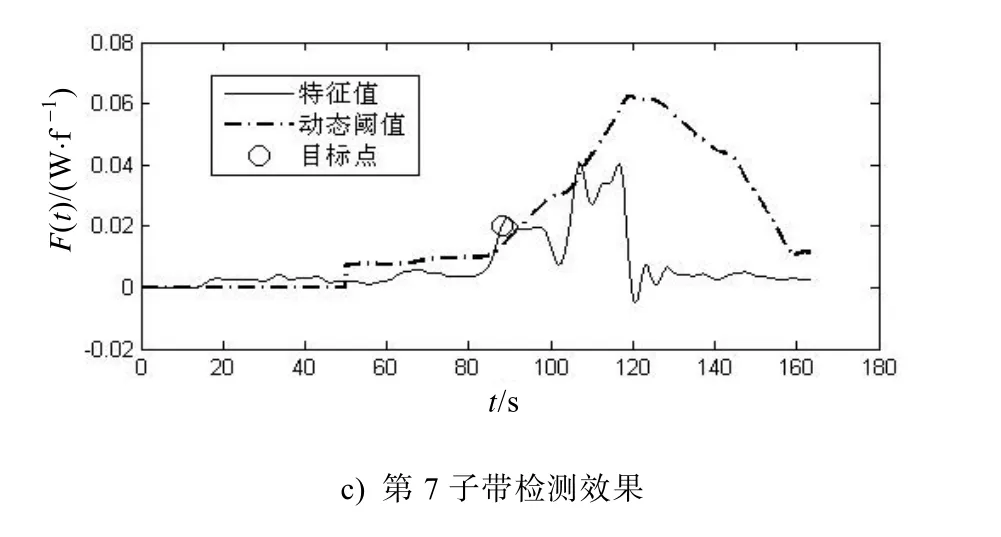
图4 本文方法检测效果
比较图3和图4可以发现,在高信噪比的条件下,2种方法均能较好地检测到目标,而且目标出现期间,特征值曲线出现了明显的峰值,其中滑动功率谱方法确认目标的时刻为103 s,而本文方法第5、6、7 子带确认目标的时刻分别为107.2 s、88.4 s和88.2 s。
3.2 仿真数据处理结果
由于所使用AD转换器的分辨力不够,试验未能获取低信噪比的远场数据。使用仿真数据对上述2种方法在低信噪比条件下的工作性能进行检验。
仿真数据由实测信号和实测噪声通过线性叠加产生。其方法为:任选一条足够长的实测噪声数据,随机选取一个时间节点插入实测信号,实测信号由长基线传感器在近处测得,具有很高的信噪比。通过改变线性叠加系数来调整信噪比,信噪比计算方法为SNR=10lg,其中 Es和Ev分别为信号出现时间段内的信号总能量和噪声总能量。
以图5所示实测信号和实测噪声为例,随机选取插入时刻点(在数据窗和检测窗之后),将a)所示信号插入到b)所示噪声中,组成仿真观测信号,使用上述2种方法对其进行检测处理。
图6所示为信噪比SNR=1.784dB时仿真观测信号时域波形及使用滑动功率谱法的检测效果,其中信号的插入时刻为100 s,结束时刻为135 s。由图6可知,在信噪比为1.784 dB时,滑动功率谱法可以检测到目标,其发现目标时刻为129.8 s,但是检测的效果较差,进一步降低信噪比,方法就有可能失效。使用本文方法对图6a)所示的仿真观测信号进行处理,取得了很好的检测效果,除子带1、2外的其他6个子带均可准确检测到目标,且目标出现期间特征量变化十分明显,6个子带检测到目标的时刻分别为123 s、116.4 s、132.2 s、112.6 s、112.4s和112.4 s。

图5 仿真用实测信号和实测噪声
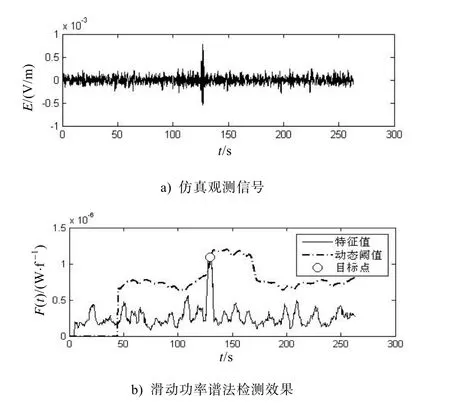
图6 SNR=1.784 dB时滑动功率谱法检测效果
图7所示为信噪比SNR=−2 1.34dB时仿真观测信号时域波形及使用本文方法的检测效果,其中信号的插入时刻为156 s,结束时刻为191 s。分析图7可知,本文方法在信噪比为−21.34 dB时仍有3个子带(子带5、6、7)可以准确检测到目标,检测到目标的时刻分别为184.6 s、184.4 s和185 s。
图8所示为使用功率谱法的检测效果,由图8可知,在低信噪比条件下,功率谱方法很难检测到目标。
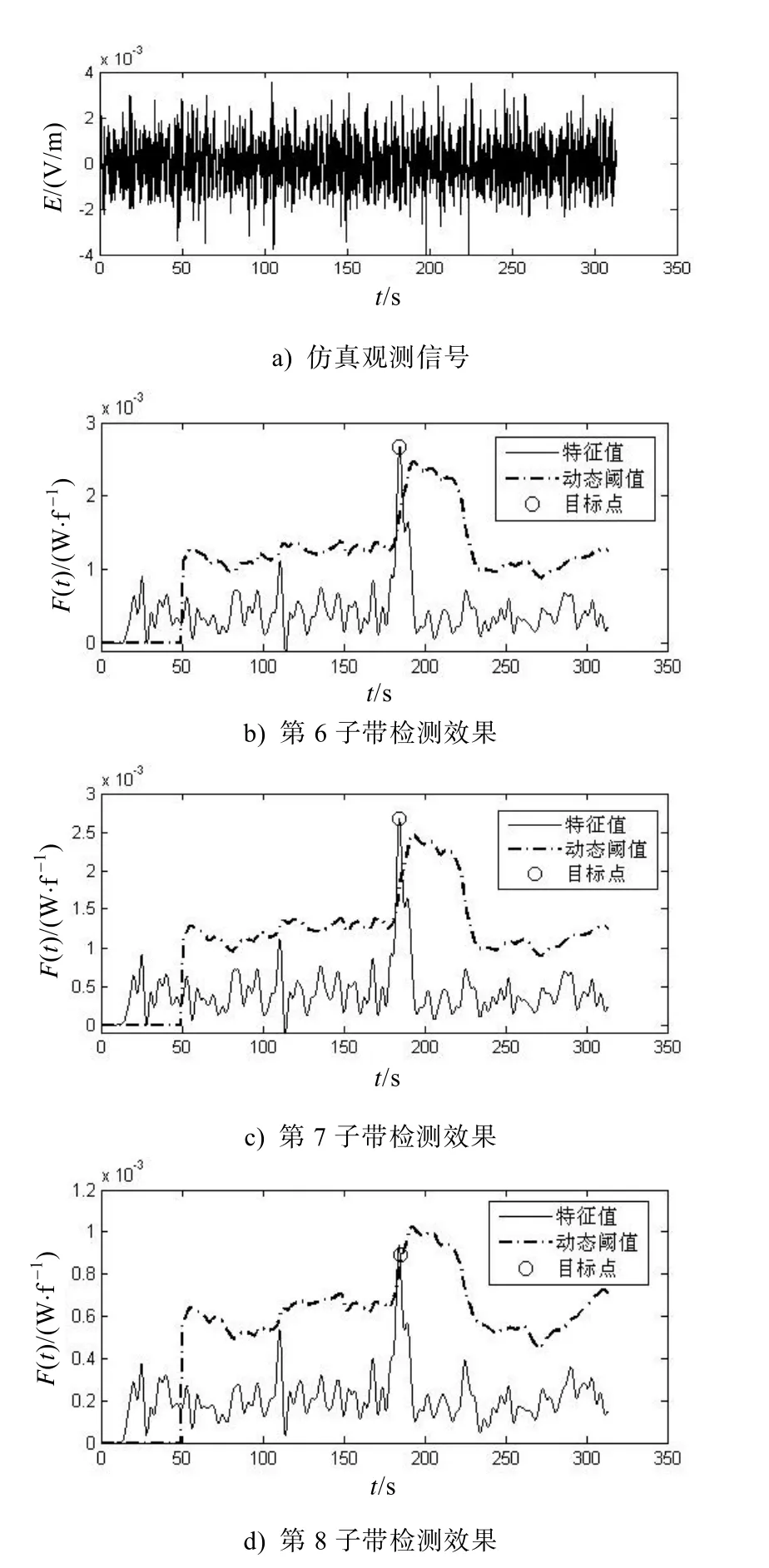
图7 SNR=−21.34 dB时本文方法检测效果

图8 SNR=−21.34 dB时滑动功率谱法检测效果
选取不同的实测信号和实测噪声,反复多次试验。结果表明,功率谱法有效工作时,信噪比一般不能低于−3 dB;而本文方法在信噪比高于−17 dB时均可以准确地检测到目标,其所需的信噪比下限最低可达−25 dB。
4 结束语
本文利用舰船轴频电场信号的线谱特征,首先使用小波包变换将观测信号分解为众多子带信号,然后在较窄的子带上使用滑动功率谱和浮动门限方法检测目标,取得了良好的效果。该方法能在低信噪比(不低于−17 dB)条件下有效检测目标,且易于工程实现,基本适合利用轴频电场远程探测目标的需要。实测及仿真数据处理结果证明了方法的有效性和优越性。
[1]林春生,龚沈光.舰船物理场[M].北京∶兵器工业出版社,2007∶239-240.
[2]龚沈光,卢新城.舰船电场特性初步分析[J].海军工程大学学报,2008,20(2)∶1-4.
[3]FCO J R,ANTONIO S.Using Electric Signatures for Extracting Target Navigation Parameters[C]//Amsterdam∶Europe Undersea Defence Technology.1999∶12-18.
[4]李松.舰船电场目标特征提取与检测方法研究[D].武汉∶海军工程大学,2008∶65-79.
[5]陈剑方,李俊,袁勇.基于最大熵谱估计的舰船静电场实时检测方法[J].舰船科学技术,2009,31(4)∶90-92,102.
[6]包中华,龚沈光,李松.基于自适应高阶累量算法的舰船轴频电场信号检测方法[J].海军工程大学学报,2009,21(4)∶13-16.
[7]卢新城,龚沈光,林春生.自适应谱线增强在舰船轴频电场信号检测中的应用[J].数据采集与处理,2004,19(4)∶438-440.
[8]胡鹏,龚沈光,胡英娣.基于小波包熵的舰船轴频电场信号检测[J].华中科技大学学报,2011,39(11)∶15-18.
[9]包中华,龚沈光,李俊.一种基于负熵的舰船轴频电场信号检测新方法[J].仪器仪表学报,2010,31(10)∶2210-2215.
[10]吴正国,尹为民,侯新国,等.高等数字信号处理[M].北京∶机械工业出版社,2009∶235-247.
