一种基于背景自适应的运动目标检测与跟踪算法
2012-03-24赵峰民陈望达
刘 皞,赵峰民,陈望达
(海军航空工程学院 a.研究生管理大队;b.科研部,山东 烟台 264001)
随着监控设备成本的大大降低,视频监控系统在金融、交通、军事等领域得到广泛应用。在视频监控系统中,运动目标的检测可以提高监控系统的智能化程度并减轻监控人员的劳动强度,因而视频图像中运动目标的检测和跟踪技术具有重要的研究意义和应用价值。
视频图像中运动目标的检测方法主要有3类:光流法[1]、帧间差分法[2-3]和背景差分法[4-5]。光流法运算公式复杂,计算量大,在没有特殊硬件支持的条件下很难达到实时要求,当目标表面存在较大灰度均匀的区域或者没有显著运动时,帧间差分法会在目标上产生“孔洞”而使目标产生过分割或者欠分割现象;背景差分法定位精确、速度快,但对光照和外部条件造成的场景变化比较敏感,需要合适的背景更新方法,常用的有基于光流法[6]和基于混合高斯模型[7]等技术的自适应背景更新方法,但这些方法计算量比较大,无法充分发挥背景差分法的优势。
根据视频监控场合的实际情况,本文提出了一种自适应背景更新方法进行运动目标的检测,然后以Kalman滤波为运动模型实现对运动目标的连续跟踪,算法的流程图如图1示。
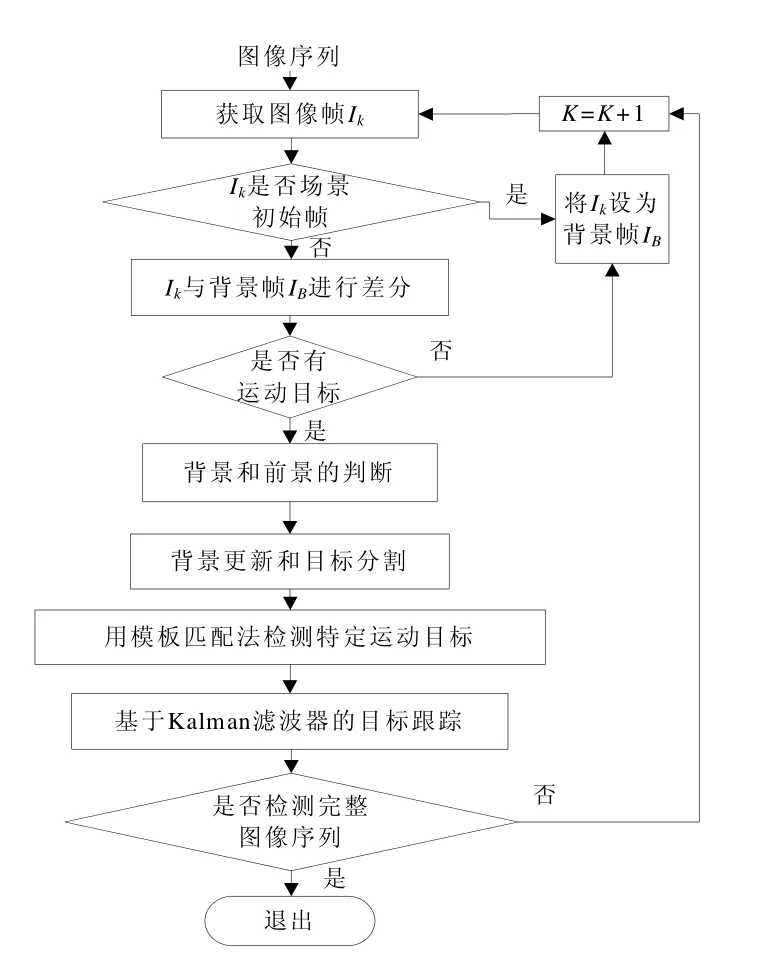
图1 运动目标检测与跟踪流程图
1 自适应背景差分
背景图像的实时更新是基于背景差分提取运动目标的关键,由于天气、照明等条件会不断发生变化造成视频监视场景的背景并不是静止不变的,因此参考背景图像必须及时更新。
1.1 背景的估计更新
本文提出的自适应背景更新方法的基本流程如图2所示。
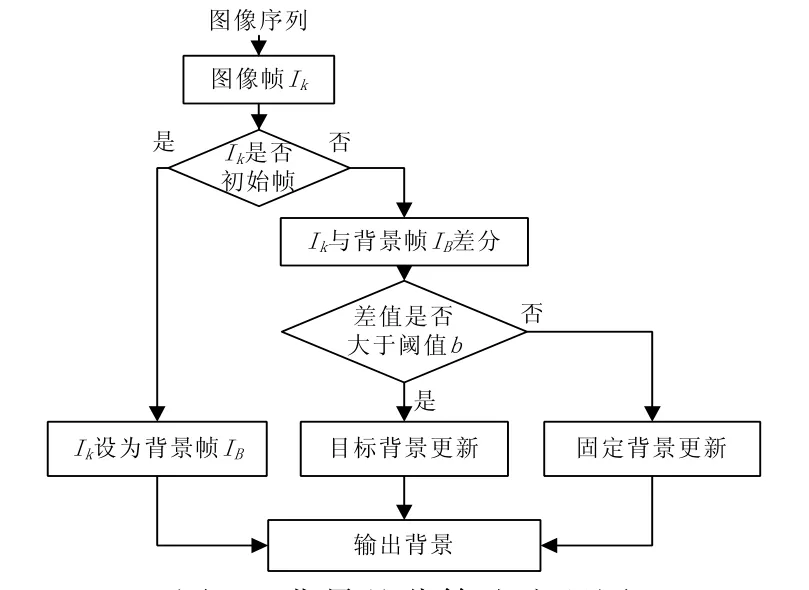
图2 背景差分算法流程图
1)首先利用序列图像的初始帧提取初始背景图像;
2)对输入的当前帧,通过与背景图像进行差分来判断采取的背景更新策略。
3)判断第K 帧中每个像素 Ik(x,y)与当前背景IB(x,y)的差值。如果小于给定的阈值b,则像素Ik(x,y)属于背景,此时用该像素的值更新背景图像中对应的像素值;否则该像素属于前景物体,则对应的背景值保持不变。因图像中的主要部分是由背景组成,所以差分图像是由大量具有低值的像素及少量具有高值的像素组成。为了求阈值b 需要在直方图中寻找一个谷点,从对应于直方图的峰值开始朝像素灰度值增强的方向搜索找到一个比峰值明显低的值(一般为峰值5%~10%),该值所对应的灰度值即被当作新的阈值。
1.2 背景差分算法
传统的背景图像差值法采用背景图像与当前帧图像的灰度差值来实现,当物体与背景的灰度值接近时,易造成分割出的目标区域存在大片的空洞或破裂。通过对采集的大量视频图像进行观察分析,发现物体与背景灰度相同的区域,一般颜色不会相同,因此采用彩色图像差值的方法。

式中:Rb(x,y)、Gb(x,y)和Bb(x,y)分别为当前背景图像某一像素的三基色值;Rk(x,y)、Gk(x,y)和Bk(x,y)分别为当前帧图像中某一像素的三基色值。该差值图像充分利用了颜色信息,可有效提高目标检测区域的完整性。
2 运动目标分割
通过背景差分法得到的差分图像是图像中的前景点集,往往包括运动目标和由于噪声等因素引起的孤立点、孤立区域和空洞等干扰,需通过图像分割算法进行目标区域的检测。本文采用基于最大类间方差法对差分图像进行二值化处理;然后采用形态学的方法去除孤立的前景点和填补目标区域的空洞;最后利用连通区域检测的方法得到目标的轮廓。
2.1 最大类间方差算法
最大类间方差法利用灰度直方图的0阶和1阶矩,以目标与背景之间的方差最大为原则而动态地确定图像分割门限值。本文利用Otsu方法自适应选取阈值的能力,自动搜索图像的最佳灰度阈值,把前景点集图像转化为二值图像,并将前景点进一步分割,得到运动目标和干扰点簇。
设图像灰度的概率密度函数为Pi=ni/N,式中:N为图像像素总数;ni为灰度值为i的像素数。
阈值的t*的选取应使类间方差最大,即
式中:0μ、1μ、0w、1w分别为背景及目标的灰度均值和概率;Tμ为整幅图像的灰度均值。
2.2 形态学闭合运算
经前景点检测后得到的图像往往存在离散的噪声前景点和目标区域中的孔洞。因此,在进行目标检测后一般要进行去噪处理。本文利用形态学闭合算法去除孤立的噪声前景点并填充差分图像中小的缺口和孔洞,弥合对象间的细小的缝隙起到连通作用。
2.3 连通区域的检测算法
经形态学闭合运算后的差分图像中小的干扰点被去除,小的间隙被连接,小的孔洞被填充,但仍然存在相对较大的白色区域以及相对较大的黑色孔洞。本文采用基于空间连续性的连通区域检测算法进行目标的分割。连通区域的检测就是找到属于同一个连通区域的所有像素点,并对不同连通区域的像素点进行标定,把面积小于预设阈值的连通区域排除,最后留下来的前景区域就是所要的运动目标。
本文使用8-连通的连通检测算子对前景点集合进行标记,当一个点位于另一个点的8-邻域时,则说明两点是8-连通的,在使用形态学闭合算法将目标相邻的像素连接起来时。设P (x,y)表示(x,y) 处的像素,则其8-邻域的定义如下:

经过连通区域检测后,会产生若干个连通的区域。除了真正的目标区域或者背景区域外,还会产生一些小块的连通区域,它们并不是目标或者背景区域,而是噪声点的连通集合。为此,本文通过对连通分析后产生的所有连通区域计算其面积,当区域面积超过设定的阈值时认为是要找的目标,否则改变区域的像素值:白色小区域改为黑色,可以消除这些噪声区域的影响,而黑色小区域改为白色,可以将那些较大的孔洞填充,从而保证运动目标区域的连通性。
3 运动目标跟踪
运动目标分割算法保持了目标的完整性,避免了噪声的影响,在分割出目标区域后,可提取前景目标的外接矩形大小、面积、长宽比、质心点位置静态特征,通过目标特征匹配建立检测所得的前景目标和受跟踪的运动目标之间的对应关系,从而确定各目标的运动轨迹,实现运动目标的跟踪。本文采用基于Kalman滤波的运动预测跟踪算法,估计目标下一时刻可能的位置,以该位置为中心,再扩展一定的区域内进行目标搜索,根据目标的尺寸和位置特征进行目标的匹配,实现对目标的快速跟踪。
3.1 基于Kalman滤波的运动预测
利用Kalman滤波的方法来预测目标的位置,并以此作为快速均值迁移迭代过程的起点,在预测的位置周围进行目标的搜索,大幅减少迭代次数,从而提高运算速度。对当前帧中各目标分别建立Kalman滤波器,根据当前帧各目标的数据进行预测,预测下一帧中各目标,将下一帧中检测到的目标分别和预测得到的目标进行匹配。Kalman滤波预测的模型如下。
式中:Ψk,k−1是非奇异状态一步转移矩阵;Γk,k−1是系统过程噪声输入矩阵;Hk是观测矩阵;Wk为系统随机过程噪声序列;Vk为系统随机观测噪声序列。
滤波增益矩阵:

一步预测误差方阵:

估计误差方阵:

Kalman滤波器状态矩阵Ψk、观测矩阵Hk、状态噪声协方差矩阵 kQ、观测噪声协方差矩阵 kR分别为:

3.2 运动目标的匹配跟踪
视频中的目标跟踪需要大量的匹配运算,而这些复杂的运算更增加了跟踪过程的计算复杂度。为此,我们在Kalman滤波预测的基础上,再引入一个质心位置和目标面积比较过程,以减少匹配运算,提高跟踪实时性。
由于图像序列在时间上密切相关,目标在相邻帧的位置应该比较接近,投影到二值图像上,就是它们的质心位置比较接近;同时在目标没有发生较大形变,运动检测较为准确的情况下,同一目标在检测出来的二值图像中大小变化是不大的,即它们在相邻帧中对应的连通区域的面积大小近似。基于以上两点分析,在跟踪模块预测出目标位置、确定了搜索范围后,先不直接进行需要大运算量的目标匹配计算,而是先检查是否有运动区域的质心落在该范围内,然后比较满足这个要求的运动区域和目标模板的面积,如果大小接近,就可以认为是同一目标,并用这个运动区域的信息来更新目标模板。
4 运动目标检测跟踪实验结果
为验证本文提出的检测跟踪算法的有效性,在VC++6.0的开发环境中对本文所使用的算法进行了软件实现,并进行了运动目标检测跟踪的试验。
本文设计实验环境为室内的场景,为了检验算法对于光照条件变化的适应性,试验的时间选择中午到晚上时段,试验的效果如图3所示。图3a)为中午时段的图像帧检测结果,图3b)为傍晚时段图像帧检测结果,图中自上而下依次为原始图像、目标分割处理的结果和目标跟踪的示意图。
试验过程中软件运行流畅,能够克服光照条件变化带来的影响,对于不同时段视频中进入视场的移动目标实现了准确的检测和稳定的跟踪,说明本文所使用的方法具有较高的实用性和较强的抗干扰能力。
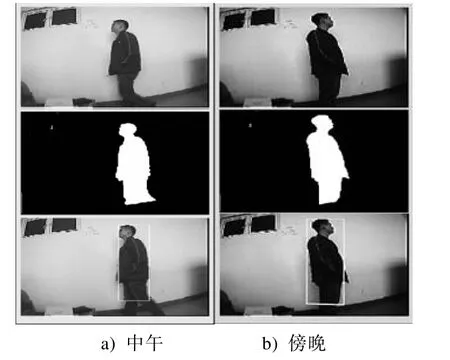
图3 运动目标检测跟踪结果
5 结论
文中提出了一种新的自适应背景更新的背景差分法,并在此基础上实现了运动目标的检测和跟踪。试验表明本文提出的算法充分发挥背景差分法计算量小、定位准确的优势,实现了对运动目标稳定的检测和跟踪。
[1]BARRON J,FLEET D,BEAUCHEMIN S.Performance of optical flow techniques[J].International Journal of Computer Vision,1994,12(1):42-77.
[2]LIPTON A FUJIYOSHI H,PATIL R.Moving target classification and tracking from real time video[C]//Proc.of WACV’98,1998:8-14.
[3]孙志文.复杂背景中移动目标的快速识别与跟踪[J].微电子学与计算,2003,20(11):48-55.
[4]ROBERT T COLLINS.A system for video surveillance and monitoring[R/OL].(2008-10-19) [2011-05-05]http://www.cs.cmu.edu.
[5]STAUFFER C,GRIMSON W.Adaptive background mixture models for real-time tracking[C]//Proc.of IEEE Computer Society Conference on Computer Vision and Pattern Recognition.1999:248-252.
[6]魏志强,纪筱鹏,冯业伟.基于自适应背景图像更新的运动目标检测方法[J].电子学报,2005,33(12):2261-2264.
[7]刘亚,艾海舟,徐光佑.一种基于背景模型的运动目标检测与跟踪算法[J].信息与控制,2002,31(4):315-319.
