基于峰度的变步长恒模盲均衡技术
2012-03-24费奇志肖金光孟庆萍
费奇志,肖金光,孟庆萍
(1.海军装备部航空技术应用研究所,北京 100071;2.海军航空工程学院研究生管理大队,山东 烟台 264001)
基于训练序列的均衡方式降低了信道利用率,且不利于自适应组网和侦听。盲均衡不借助训练序列,只根据接收信号对信道进行自适应均衡,使滤波器输出在某种意义上最逼近期望信号。
恒模算法(constant modulus algorithm,CMA)盲均衡的代价函数仅与接收信号的幅值有关而与相位无关,具有计算复杂度低、易于实现等优点,引起了广泛关注,但存在收敛速度和稳态误差之间的矛盾。如何解决这一矛盾成为提高该类均衡器性能的关键问题。
1 CMA算法及其收敛特性分析
CMA算法利用了发射信号的恒模特性,其代价函数[1]为:

选取该代价函数的合理性在于,恒模信号的功率恒定,因而收敛后均衡器的输出功率也应是恒定的。
CMA算法的迭代步骤可以归纳为[2]:
式(2)~(5)中:R2为源信号 x (n)的统计量;Y (n)为均衡器的输入;wˆ (n)为均衡器的权系数;x~ (n)均衡器的输出,e (n)为误差信号;μ为步长调整因子;*和H分别表示复共轭和共轭转置。
CMA算法的实质是计算滤波器的输出误差,最小化相对统计量常数的偏离程度,当均衡器收敛时,误差信号最小。与LMS算法相比,搜索算法相同,误差信号不同,前者用均衡输出和源信号的非线性函数,而后者依赖于训练序列产生,这正是盲均衡和非盲均衡的区别。
由式(1)、(2)可知代价函数J (Wn)是权系数向量Wn的非凸函数,均衡器收敛点不唯一,具有局部最小点,初始化对CMA算法收敛性能的影响较大[3]。CMA算法沿着负梯度的方向搜索,如果初始值接近局部最小点,那么有可能误收敛,且如果太过于接近“鞍”部,因为该处附近的梯度绝对值较小,收敛速度会很慢。
2 信号的峰度统计特性
2.1 信号的峰度定义
峰度定义为归一化的四阶累积量,在盲信号处理领域中峰度的应用较为广泛[4]。自相关函数和功率谱可以完全确定零均值平稳高斯过程的统计特性,对非高斯过程无能为力,而高阶统计量是分析非高斯信号的主要工具。假设信号是独立同分布的,实随机变量x的峰度定义为归一化四阶中心矩[4]:

式中,mx和2xσ分别定义为随机变量x的均值和方差。
这两种定义没有本质差别,但使用第二种定义时,高斯随机变量的峰度为零,从而超高斯信号的峰度为正值,亚高斯信号的峰度为负,更直观。
复平面上MPSK信号星座图是循环对称的,样本数量较大时均值为零,且对复随机变量信号x 有此时,峰度的定义为:

2.2 选择峰度误差作为控制均衡器系数调整因子的理论依据
盲均衡的目的就是使:

式中:T为整数时延;φ为常数相移。因而有:
对式(9)取傅里叶变换:w (ω) H (ω)=ej(φ−Tω)即:

恒时延T 不影响输入信号序列的恢复,而常相位φ可以利用判决装置去除。
令 S (ω)=H (ω) w (ω),s(n)代表信道与均衡器组合系统的冲激响应,则有:

假设x (n)为独立同分布的,则
交换数学期望与求和的顺序可得:
同理可得,


式中,
将式(16)代入式(15)可得:
因而随机信号 x~ (n)的峰度为:
这就得到峰度定理[5]:若满足条件则:②当且仅当向量 s (n)满足置零条件时,定理说明在达到收敛之前,均衡器输出信号峰度的绝对值小于源信号峰度的绝对值,当且仅当达到收敛时相等。均衡的充要条件是x (n)和x~ (n) 具有相同的方差和峰度绝对值,当峰度定义为四阶归一化累积量时,等价为信号 x (n)和均衡所得信号 x~ (n)的四阶归一化累积量相等。这是CMA算法的理论依据,也是本文选择峰度误差作为控制均衡器系数调整因子的理论依据。
采用电容器串联补偿技术能有效提高线路末端电压,达到调压目的,特别是对功率因数较低、负荷波动较大的线路具有显著的效果。根据以上分析可知,影响串补技术效果的因素中,线路阻抗、线路容量、功率因素均为线路本身信息,在串补装置加入前为定值,因此在具体实施过程中,要达到串补装置电压调节的最优结果,需综合考虑安装位置和补偿度。

2.3 离散MPSK信号峰度的估计特性
显然上一节中信号峰度定义是基于连续信号的,但是离散信号在处理和设计实现中具有明显的优越性。根据连续信号的峰度定义和功率谱密度可计算出不同信号的峰度[4]。对于MPSK信号,k4'为−1。那么离散信号中,究竟多少点信号才能够较为准确地反映信号的峰度特征呢?仿真图见图1(为理解方便,给出了8PSK信号峰度统计的误差曲线)。
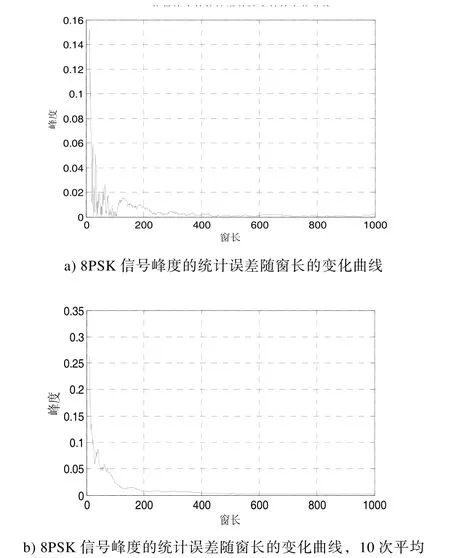
图1 8PSK信号峰度的统计
仿真表明,峰度的统计长度为60点时统计误差在5%以内,100点时则可以达到1%左右。本文使用信号峰度统计的目的是:刻画均衡器输出信号的“质量”,以控制均衡器系数更新的步长,同时又要考虑跟踪信道变化的能力。取统计误差小于5%的统计长度,选择信号峰度的统计长度为60点,这样的精度在精确统计信号的峰度时误差较大,但本文使用峰度作为步长因子的调节,只要能够反映信号的变化趋势就可以了。计算信号的峰度时,如果每次重新计算所有变量,那么计算量是比较大的,观察可知有大量的中间结果是可以利用的。
3 仿真参数设定
国际电信联盟(International Telecommunication Union,ITU)推荐Watterson模型为短波语音信道调制解调器设计和性能测试的标准信道模型[6],美军标对串行体制调制解调器测试性能提出了要求[7]。
短波信道串行体制数据通信采用经格雷编码的8PSK,符合恒模特征[7]。由于CMA 只根据接收信号的幅度调整均衡器,输出可能存在固定相位差,直观表现就是星座旋转,后接一锁相器或者采用差分调制即可解决,显然后者实现较为简单可靠,因而采用D8PSK 调制。选用51阶平方根升余弦脉冲成型滤波器作为脉冲成型和匹配滤波器,滚降系数为0.25[8]。单载波通信系统的恒模盲均衡器多采用中心初始化,均衡器阶数的经验值为信道长度的3~5 倍[9]。短波串行体制通信波特率为2 400,本文考虑的最大延时为2 ms,5 倍延时对应的延迟为24 Baud,加上中心初始化,取均衡器的长度为25。固定步长恒模算法均衡器步长因子μ的优化值为是信号星座点的复数集,μ 取μ0/200,在收敛过程中每10 000点步长因子除以2[10]。
4 仿真分析
4.1 固定步长恒模算法
均衡器收敛速度和残余误差是两个相互制约的因素,为了充分揭示步长对收敛速度和稳态误差的影响,设多普勒扩展为0,令步长相差10 倍。信道多径延迟为2 ms,且两路信号的平均功率相等,加性高斯白噪声 17 dB,步长为mu_max/2,其中mu_max 定义为保证均衡器收敛的最大值[10]。时间为3 s,取1 000次运行均值,仿真图见图2。
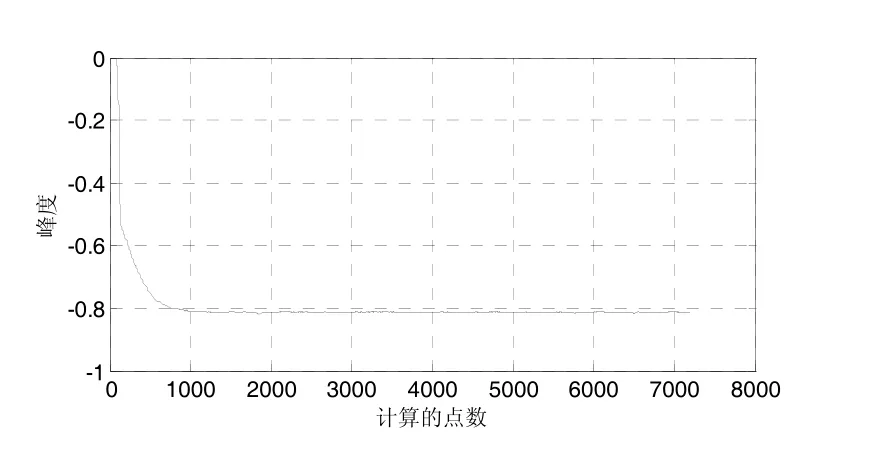
图2 大固定步长恒模均衡器的仿真
由图2知,均衡器收敛约需900点,收敛后信号峰度约为−0.81。均衡器输出信号峰度曲线与误码率的收敛趋势一致,也说明了均衡器输出信号峰度能够表征均衡器收敛的特性。减小固定步长,取步长为mu_max/20,其余参数不变时的仿真图见图3。
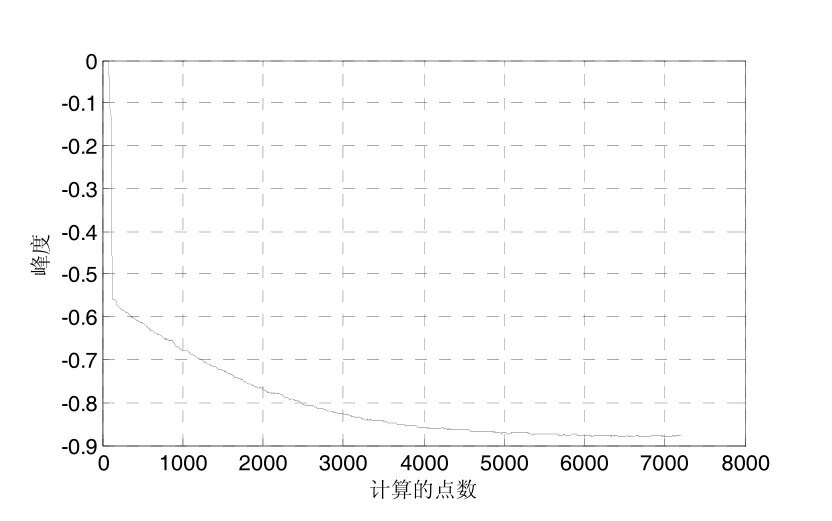
图3 小固定步长恒模均衡器的仿真
由此可知,使用固定步长的均衡器时,步长小时收敛速度慢但稳态误差小,步长大时收敛快但稳态误差大。固定步长均衡器的步长选择必须十分谨慎,对于不同程度多径延迟和多普勒扩展,对应着不同的优化步长。在固定信道均衡器中,由于介质的固有特性变化不大,可以针对不同环境选择一个最优值,然而,在无线信道中信号传播路径情况比较复杂且是时变的,因此,有必要选取适应于不同信道参数的步长自适应控制方式。
4.2 基于均衡器输出信号峰度误差的变步长恒模算法
均衡器收敛速度和收敛后的残余误差是两个相互制约的因素,采用固定步长只能在这两种性能之间进行权衡。而采用某种函数或者信号特征的某种统计量来控制均衡器的步长,期望获得较快的收敛速度和较小的收敛误差。对于PSK信号,期望信号峰度为−1,那么用输出信号峰度与期望信号峰度差值的某个函数,调节均衡器的步长,从信号峰度的意义上来说,均衡的过程就是把将信号的峰度从超高斯和高斯向期望的亚高斯峰度逼近的过程。
接收信号的峰度计算较为复杂且意义不大,但是经过均衡后信号的峰度可以作为CMA算法收敛的量度[4]。就是说均衡器输出信号的峰度统计可作为均衡器工作性能的量度,那么也就可以作为均衡算法搜索步长的控制因子,因为信号峰度与源信号理想峰度相差越大,均衡器距收敛状态越远,需要更新步长就越大,以加快收敛速度;相反,信号峰度与源信号理想峰度相差越小,均衡器距收敛状态越进近,需要更新步长就越小,以免较大的振荡。因此,采用信号的峰度误差控制均衡系数更新步长,控制均衡输出信号峰度向期望值逼近的速度。
本文使均衡器的步长与信号峰度误差成正比,控制均衡输出信号峰度向期望值逼近的速度。
采用均衡器输出信号误差的函数κ×mu_max×(k urtosis−g)作为步长。其中,kurtosis为均衡器输出信号的峰度,g为信号的期望峰度值,mu_max为可保证均衡器收敛的最大步长[10],κ为小于1的常数因子。此时算法可称为变步长恒模算法(Vary Step Constant Modulus Algorithm,VSCMA)。必须要说明的是步长轨迹中的前60点是常数,因为此时尚处于启动峰度统计的窗长之内,步长为一个固定值。仿真图见图4。
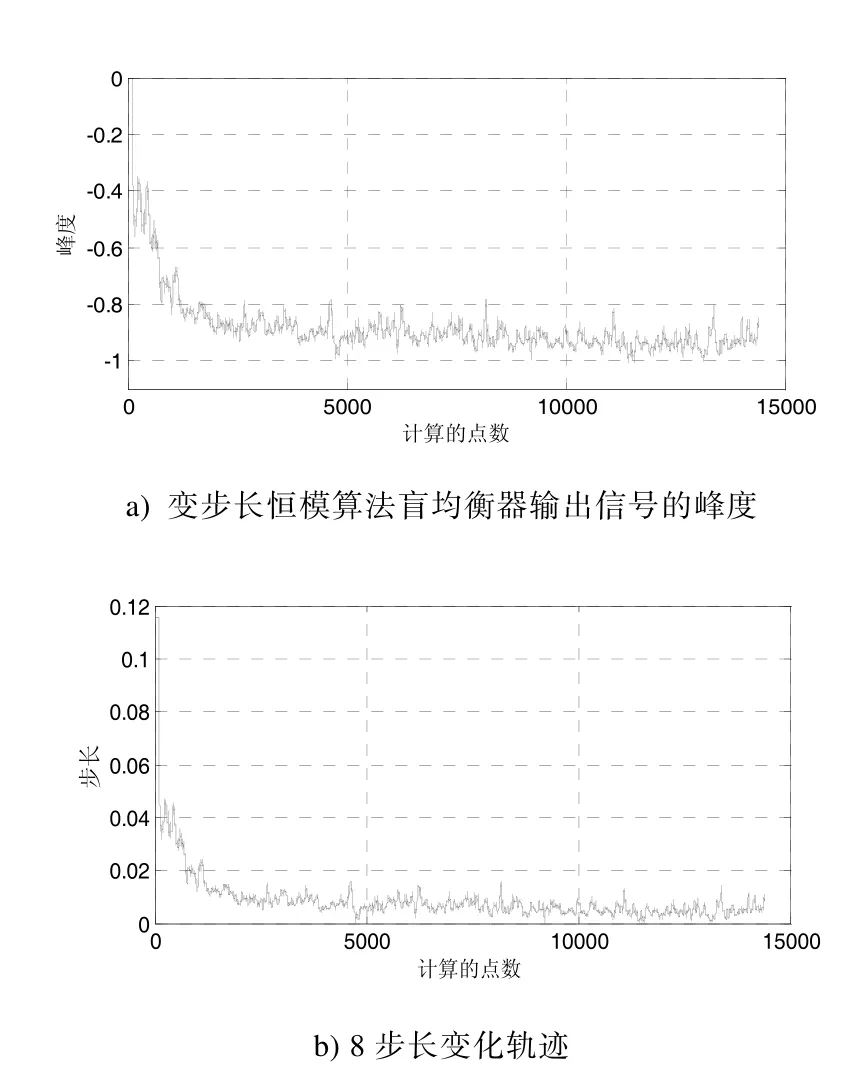
图4 变步长恒模均衡器的仿真
κ 取值为0.5时均衡器输出信号的峰度曲线,峰度值达到−0.8需要 1 000点,收敛后峰度为−0.9±0.1范围振动。步长变化轨迹与均衡器输出信号峰度曲线存在线性函数关系,与采用的变步长函数相对应。
相比于固定步长均衡器,均衡器输出信号星座图更加清晰,从均衡器输出信号的峰度向理想峰度逼近的曲线可以看出,达到相同均衡器输出信号峰度的速度明显加快。这是因为固定步长的均衡器为了保证全局收敛和收敛后的稳定性,必须采用相对较小的步长。而变步长均衡器在初期采用较大的步长,以加速收敛,接近收敛点时采用较小的步长以减小稳态误差。变步长均衡器改善了固定步长的缺点,依据均衡器输出信号的“质量”来调整均衡器的步长,在偏离大时采用较大的步长以加快收敛,在偏离小时采用较小的步长,以降低收敛后的稳态误差,仿真表明一定程度上缓解了固定步长必须在收敛速度和剩余误差之间权衡的矛盾。
5 结论
固定步长的恒模盲均衡器存在收敛速度和稳态误差上的矛盾。依据峰度定理,盲均衡器输出信号的峰度小于等于源信号的,且只有达到收敛时两者相等,本文提出用均衡器输出信号峰度误差控制步长的变步长恒模算法,仿真表明,变步长均衡器能够一定程度克服收敛速度和稳态误差之间的矛盾。
[1]GODARD D N.Self-recovering equalization and carrier tracking in two dimension data communication systems[J].IEEE Transaction on Communication,1980,28(11):1867-1875.
[2]ADAM O’DONNELL.Use of Constant Modulus Algorithm for Blind Channel Equalization[C]//Drexel transactions on digital signal processing,2001:1-3.
[3]PHILIP SCHNITER,RAÚL A CASAS,AZZÉDINE TOUZNI,C.RICHARD JOHNSON.Performance analysis of godard-based blind channel identification[J].IEEE Transactions on Signal Processing,2001,49(8):1757-1767.
[4]HEINZ MATHIS.Nonlinear Functions for Blind Separation and Equalization[D].Swiss:Swiss Federal Institute of Technology,2001.
[5]SHALVI O,WEINSTEIN E.New criteria for blind deconvolution of nonminimum phase systems channels[J].IEEE Transactions on Infornation Theory,1990,36(2):312-321.
[6]International Telecommunication Union.ITU-R F.1487 Testing of HF Modems with Bandwidths of Up To About 12 kHz Using Ionospheric Channel Simulators[S].Geneva,Switzerland.International Telecommunication Union,2000.
[7]Department of Defense Interface Standard of America.MIL-STD-188-110B First TAC Draft[S].2000:33-34.
[8]周新力,肖金光,吴海荣,等.短波信道数字传输脉冲成形技术研究[J].海军航空工程学院学报,2007,22(4):412-416.
[9]MARTIN R K,JOHNSON C R.Adaptive Equalizationtransition from single-carrier to multicarrier systems [J].IEEE signal processing magazine,2005,22(6):108-122.
[10]ÁLVARO PALOMO NAVARRO.Adaptive subband equalization in wireless system[D].Blekinge,Swiss:Blekinge Institute of Technology,2006.
