水下滑翔机水动力外形研究综述
2012-03-16李志伟崔维成
李志伟,崔维成
(中国船舶科学研究中心,江苏 无锡 214082)
1 引 言
据美国国家地理网站报道[1],2012年3月26日,美国导演卡梅隆已经驾驶其请人秘密研制的单人深潜器“深海挑战者(DEEPSEA CHALLENGE)”号,见图1,成功下潜至世界海洋的最深处—马里亚纳海沟的挑战者海渊底部,最大下潜深度10 898 m。事实上,卡梅隆并不是唯一一个梦想着潜入海洋最深处的探险家。美国探险家Steve Fossett也在2005年曾委托豪克思海洋技术公司 (Hawkes Ocean Technologies,简称H.O.T)[2]帮他设计制造能到达全海深的两座位的Deep Flight Challenger(DFC)号载人潜水器,见图2。由于Steve Fossett在2007年9月驾机探险过程中意外身亡,DFC潜水器的设计制造工作由于资金中断而停滞过一段时间,但在2010年,另一位探险家Chris Welsh获得英国实业巨头理查德·布兰森(Richard Branson)的资金支持,使得该项目得以继续。他们两人现计划于2012年冲刺大西洋最深海沟—波多黎各海沟[3]。

图1 “深海挑战者”号载人潜水器 Fig.1 Deepsea Challenger
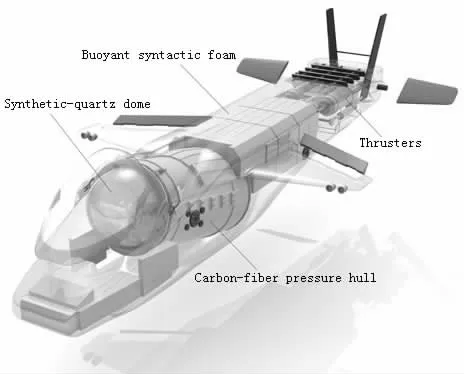
图2 H.O.T公司的DFC概念图Fig.2 Conceptual painting of DFC
这两种类型的载人潜水器与目前国际上著名的第二代科学作业型载人潜水器[4]有明显的不同,主要区别有两个方面:(1)通过减人的办法来回避大载人舱制造的困难,如卡梅隆的单人载人舱,内直径只有1.1 m,采用普通的高强度钢就可以制造。(2)显著提高下潜上浮速度。第二代载人潜水器的下潜上浮速度一般在1~2 Kn之间,我国的“蛟龙”号的平均速度是1.5 Kn。如果以这样的速度下潜到挑战者深渊,则需要4小时,来回就要8小时,这样在海底的工作时间就很短了,下潜一次的经济性就变差。目前比较希望的海底工作时间是6小时,因此,下潜上浮的时间最好能控制在4小时之内。这有两种办法来实现,如继续使用无动力下潜上浮的原理,则用鱼雷的外形来提高速度。另一种手段是把水下滑翔的原理引入载人潜水器,用较少的动力实现较高速度的航行。“深海挑战者”号采用了第一种方式,初始下潜速度是4.5 Kn,接近海底时1.5 Kn。初始上浮速度5.7 Kn,靠近水面时降到4.8 Kn,平均上浮速度约5 Kn。Deep Flight Challenger(DFC)号载人潜水器采用的是第二种方式,如图2所示,他们自己称为“飞行”式载人潜水器。我们把下潜上浮速度在5 Kn左右的载人潜水器称为第三代载人潜水器。而目前这两款第三代的载人潜水器的作业能力均是不强的,它们是以探险和创造吉尼斯纪录作为主要目的,但具有较强作业能力的第三代全海深载人潜水器是未来的发展方向[5],如果我们真想成为海洋高技术强国,必须对这一发展方向引起重视。对于第三代全海深载人潜水器的研发来说,除了承压能力比“蛟龙”号增大以外,最主要的技术差别就是要把水下滑翔机的原理搞清楚并应用到载人潜水器的设计上,本项工作就是在这样的需求背景下开展的。
2 水下滑翔机发展历程
1989年,美国人Henry Stommel在海洋学杂志(Journal of Oceanography)上发表了一篇题为“The Slocum Mission”的论文[6],作者以一位生活在2021年的海洋学者的身份对当时水下滑翔机的工作状态作了如下的描述:“每天有上千艘水下滑翔机不间断地进行着全球海洋资料的搜集工作,它们通过调整压载水舱来实现纵向的运动,而水平方向的运动则由水翼进行控制,同时使用内部执行机构对滑翔姿态进行调整;这些水下滑翔机每天浮出水面6次,通过卫星传输收集到海洋信息,并接受控制指令”。文中同时提出了水下滑翔机所必须具备的四大特点:建造和作业费用低,作业时间长,航行距离大,能够实现自动控制和协同作业。这些优点保证了水下滑翔机对海洋进行高时空密度的监测与测量能力,提高了人类对海洋环境的认知水平。
正是在Stommel对水下滑翔机最初构想的引导下和美国海军研究所(Office of Naval Research,ONR)的资助下,美国于上世纪末开始了3种型号的电池驱动水下滑翔机的研制工作:Webb Research Corp(WRC)研制的高机动性、适合在浅海工作的Slocum(Battery)[7],适合在1000m级深海工作的Spray[8](Scripps Institution of Oceanography,SIO)和 Seaglider[9](华盛顿大学)。 同一时期,Webb Research Corp还开展了不依靠电池驱动、而是利用大洋主温跃层铅直方向的温度梯度从周围海水环境中获取能量的Slocum(Thermal)[10]的研制工作。本世纪初,美国开展了大量的水下滑翔机海上航行试验和不同型号滑翔机之间的协同作业试验[11-14]。由于作业任务和运输、布放要求等条件的限制,上述4种型号的水下滑翔机在外形尺寸和重量方面比较接近:长约2 m、重约50 kg,由于长达数月和数千公里的续航要求,为了节省能源,水下滑翔机的设计航速通常较低,约为0.5 Kn,因而所需调节的净浮力仅为其排水量的0.5%至1%[12]。已有文献[15-16]对上述4种型号的水下滑翔机作了比较详细的综述,在此不做重复,仅将一些主要性能指标列于表1,便于比较和分析。
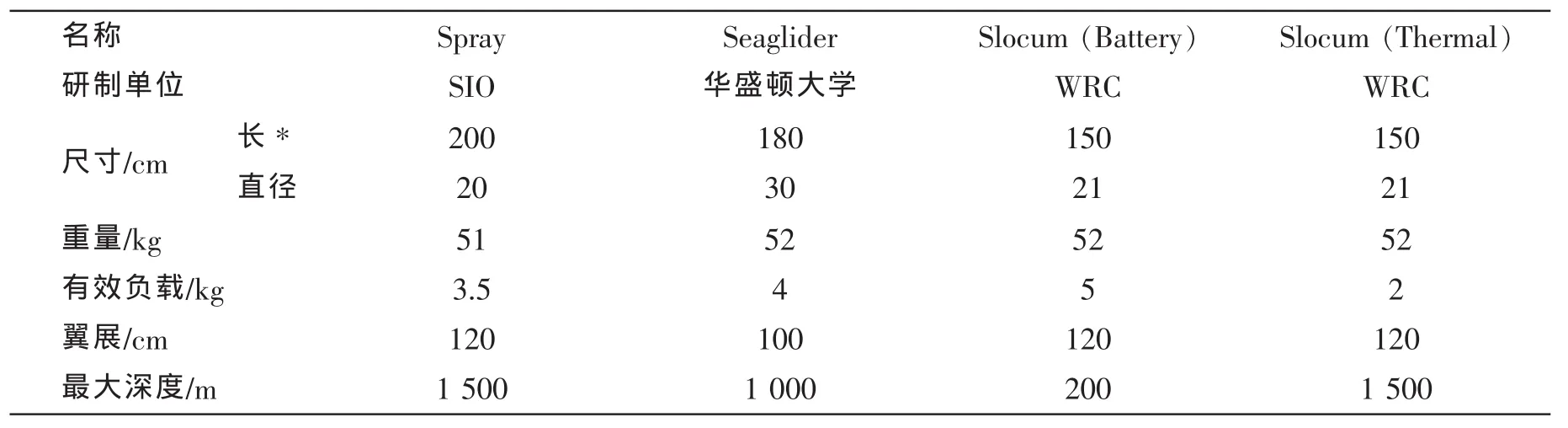
表1 4种型号水下滑翔机的主要性能指标Tab.1 The main parameters of four underwater gliders
此外,美国的普林斯顿大学建造了一艘实验室级别的水下滑翔机ROGUE,主要用于水下滑翔机建模和控制方法的研究[17]。日本和法国也研制了各自的水下滑翔机,并且各具特色。日本东京大学研制的ALBAC[18]号水下滑翔机并没有搭载浮力调节系统,而是使用可弃压载实现下潜和上浮,完成一次下潜上浮动作后即进行回收。由于未搭载浮力调节系统(对于使用浮力调节系统实现下潜上浮运动的水下滑翔机,改变自身浮力所消耗的能量约占其所携带电池能源总量的80%[19]),ALBAC可以携带更多的传感器,帮助科学家更加准确地掌握其在海流等周围环境影响下的真实航行状态。法国ENSIETA研制的STERNE[20]号是一艘结合了水下滑翔机和传统AUV概念设计而成的混合型水下滑翔机,拥有两种不同的运动模式:无动力推进的滑翔状态和使用动力推进的水平飞行状态。当使用动力推进时,ENSIETA可以像传统的AUV那样执行海底附近的搜索工作,同时还具备水雷探测等军事用途。
国内对于水下滑翔机的研究起步较晚,但近年来,有不少的高校和科研单位开始了水下滑翔机的研究工作。中国科学院沈阳自动化研究所在载体设计、运动分析等方面做了大量的工作[21-23],并且完成了实验原理样机SEA-WING的湖中试验[24]。天津大学对水下滑翔机的航行效率进行了分析[25],并且对带螺旋桨的混合驱动水下滑翔机进行了探究[26]。中国船舶科学研究中心对水下滑翔机的水动力性能进行了研究[27-28],采用动网格计算,对非稳态运动进行了探究[29]。上海交通大学对温差能驱动水下滑翔机浮力系统的工作原理、浮力调节部件的体积变化规律进行了分析[30-31],为将来在我国发展更节能、续航力更强的温差能驱动水下滑翔机打下了基础。此外,浙江大学[32]、西北工业大学[33-35]、海军工程大学[36-37]等高校和其它一些科研院所均在水下滑翔机的研制方面做了一些工作,限于篇幅,在此不一一列举。
3 水动力外形研究进展
水下滑翔机主要用于海洋环境长时间、大范围的实时监测,因此要求其具有优良的水动力性能。水下滑翔机的水动力外形主要由艇体、水翼和附体三部分组成,本节将分别讨论它们对水动力性能的影响,并通过水翼的安装位置、水翼弦线和艇体纵轴的夹角等参数来讨论水翼和艇体之间的相互作用。
3.1 艇体外形
水下滑翔机的艇体外形主要有两种:带平行中体的水滴形和低阻层流形。Slocum和Seaglider号水下滑翔机分别采用了上述两种艇体外形,如图3所示。

图3 采用水滴形和低阻层流形的艇体外形Fig.3 Hull with drop-shape(left)and low-drag shape
3.1.1 水滴形艇体
水滴形回转体母线线型的公式由瑞典NYSTROM于1868年提出,用1/4可以调整指数的椭圆及一段可以调整指数的抛物线来描述[38]:

其中:D为平行中体直径;Lf、La分别为首、尾部的长度;nf为首部椭圆指数,对首部的丰满度起主要控制作用;na为尾部抛物线指数,对尾部去流角起主要控制作用,nf、na对回转体的纵向棱形系数同时起作用。
为了获得优良的水动力性能,首部椭圆一般取a/b≥1.5~2.0(其中a为椭圆长轴,b为短轴)为宜,瘦长的尾部线型使来流均匀,防止水流分离[39]。文献[40]采用计算流体力学软件CFX分别对半球形首尾的艇体和首尾线型经过椭圆修正的艇体的阻力进行了计算,发现首尾线型经过椭圆修正的艇体压力梯度明显减小,压力分布曲线比较平坦,因而形状阻力显著减小,阻力性能得到改善。对于圆柱形的平行中体段,在满足装配空间的要求下,适当增加细长比,有利于提高艇体的升阻力,从而获得较高的经济性。AUV的长细比通常设计为5~8,这是仿鱼雷的设计,能同时获得较大的艇体容积和优良的阻力性能[41]。
3.1.2 低阻层流形艇体
该线型由Huggins和Packwood提出[42],通过形成合理的压力梯度,使得总长中大部分是层流段,从而阻力非常低。研究表明,即使在7 m/s的高速下,Seaglider依然能维持其80%的部分为层流状态[9]。但是,加工和安装艇体的标准是非常严格的,因为艇体首部微小的偏差都会影响艇体的阻力,从而失去其外形优势[41]。因此,对于低阻层流形艇体,必须将突出的附体布置得远离层流区域,此时,附体形成的阻力对整体阻力影响不大。
低雷诺数下,拥有细长形艇体的Spray和Slocum的阻力系数较小;而在高雷诺数下,采用低阻层流形艇体的Seaglider拥有阻力方面的优势;分界点约为ReL=6×105,此时水下滑翔机的速度约为0.3 m/s[8]。对于其它回转体型的艇体,文献[43]讨论了修长度系数、棱形系数、首部半径、尾部半径、最大截面位置等5个参数对艇体水动力性能的影响。
3.2 水翼外形
现有水下滑翔机的水翼大都采用NACA翼型(Slocum号水下滑翔机采用平板翼),由于作业任务的需要,希望水下滑翔机在下潜和上浮时拥有相同的滑翔姿态(相同的滑翔角和速度),因此选用对称翼型(拱度比为0),即NACA00xx翼型,后2个数字表示厚度百分比(NACA剖面的最大厚度位于离前缘30%剖面弦长的地方),常用的厚度比取0.10~0.15[26-27,33]。文献[44]通过风洞试验测量了矩形、椭圆、齐莫曼和反齐莫曼四种平面形状的机翼的升力系数和阻力系数,结果表明,在大部分试验迎角内,矩形翼的升力特性相对较好,反齐莫曼翼的升阻比特性较好。由于反齐莫曼翼的外形相对复杂,加工比较困难,因此,现有水下滑翔机采用矩形翼(梯形翼可以看成是带前缘后掠角的矩形翼,后掠角的影响将在3.2.1节中讨论)。下面将分别讨论弦长、展弦比、后掠角对水翼水动力性能的影响,并通过水翼的安装位置、水翼弦线和艇体纵轴的夹角等参数来讨论水翼和艇体之间的相互作用。
3.2.1 弦长、展弦比和后掠角对水动力性能的影响
文献[26]通过正交数值试验表明,水翼弦长对升阻比L/D的影响很大,见图4,同时,水翼弦长的选择还要防止水翼处的流动分离[8]。

图4 L/D变化趋势Fig.4 L/D trend of change

图5 不同展弦比矩形翼的CL/CD~αFig.5 CL/CDvs α of rectangular wings of various AR
水翼的升力和阻力系数随攻角的变化受水翼展弦比的影响很大,理论和实验研究表明[15,19,26,45]:随着展弦比的增加,水翼的升阻比L/D也随之增加。这是因为,对于有限翼展水翼,上下两翼面产生了从高压面绕过端部向低压面的横向流动,减小了上下两翼面的压力差,因而导致了诱导阻力的产生,这种影响对于小展弦比的水翼更为严重。在对小展弦比机翼进行试验研究时,发现了升阻比不随展弦比单调变化的异常现象[44],如图5所示。此外,展弦比对升力系数和失速角的影响是相反的,即相同攻角下升力系数越大的水翼,其失速角越小。
带后掠角的水翼不仅可以有效地减少水草的堆积[10],同时对提高纵向稳定性也有好处[19]。随着后掠角的增加,作用在水翼上的水动力臂随之增加,提高了水下滑翔机对周围环境干扰的抵抗能力[40]。文献[44]的研究表明,后掠角的增加使得升力系数和阻力系数同时增加,对滑翔经济性,即升阻比L/D的影响不大。同时,后掠角的增加使得水翼的失速角亦有所增大。
3.2.2 水翼的布置
升降翼的安装位置主要从动稳性来考虑,主载体是引起方向不稳定的部件,其水动力作用点一般靠近首部,因此升降翼的位置通常位于载体的中后部位[46]。升降翼的安装位置的选择同时还要兼顾经济性的影响,当升降翼形心位于浮心略后方时升阻比较大,而当布置位置再往后时,阻力上升而升力不变,滑翔经济性下降[47]。对于不同外形的水下滑翔机,水翼的最佳布置位置各不相同,需要通过详细的水动力性能计算和实验验证才能获得。
文献[48]研究了水翼与水下滑翔机主轴之间的夹角(简称“水翼角”)对水动力性能的影响,结果表明,当水翼角为20°而水下滑翔机的攻角为0°时测量得到的升力系数与水翼角为0°而攻角为20°时的升力系数大致相同,如图6。由此我们可以断定,水下滑翔机上的升力主要由水翼产生。

图6 不同水翼角三角翼的CL~α曲线Fig.6 CLvs α of triangular wings with various wing angles
正是基于这一“等效”,有学者提出在水下滑翔机工作时保持艇体为零攻角,以获得最小的阻力,同时调整水翼与艇体主轴之间的夹角,以产生所需的升力,从而获得更高的滑翔效率[19]。文献[49]对主翼水翼角可调的水下滑翔机进行了研究,发现该型水下滑翔机可在比固定翼式水下滑翔机小得多的滑翔角下实现巡航运动。但是,对于水翼角的实时调控会带来机械上的复杂性以及对电池能源更多的消耗,因此,对于该型水下滑翔机的滑翔经济性还需要详细的综合评估。
3.3 附体对水动力性能的影响
这里的附体主要指安装在水下滑翔机艇体以外的各类有效负载,其中大部分是各类传感器。对于Slocum(Thermal)型水下滑翔机,附体还包括安装在艇体上方的温差能转换装置。水下滑翔机所受到的阻力对几何变化十分敏感,仅占总面积2%的传感器所产生的阻力可以高达整个水下滑翔机总阻力的25%[19]。因此,对于附体外形及其布置的优化,将对提升水下滑翔机的阻力性能起到至关重要的作用。文献[50]中的水下自航行器为了满足坐底测量的功能要求,具有相对复杂的附体结构,附体阻力超过了总阻力的50%,作者通过一系列措施减小了迎流面积,从而减小了航行器的阻力。
本节中所提到的滑翔经济性,是针对水下滑翔机上的升阻比而言的,升阻比的增加也可能是升力和阻力同时增加,只是升力增加得更多而已。然而,对于那些采用大滑翔角的水下滑翔机而言,减小阻力比增大升阻比和升力更重要,由于水下滑翔机主尺度和速度决定了它们航行状态下的雷诺数大多处于转折区附近,此时增加水翼的展弦比有可能增加阻力[19]。因此,需要根据具体的工作要求,为水下滑翔机选择合适的水动力外形。
4 混合驱动和飞翼等概念在水下滑翔机上的应用研究
飞翼(Fly wings)和带翼体(blended wing body,简称BWB)的概念源于航空工业,由于机体本身也呈机翼形状,因此可以产生较大的升力,从而整架飞机可以获得很高的升阻比。将飞翼的概念引入水下滑翔机,正是希望借助其独特的构型,获得更高的滑翔经济性。但是,水下滑翔机工作在数百米,甚至上千米深的水域,许多设备需要布置在耐压舱室内,飞翼构型内部容积小的缺点就凸现起来。文献[19]在内部容积相等的前提下,对飞翼和传统的水下滑翔机的水动力性能进行了初步的对比探究,结果如下:
(1)为了获得同样的内部容积,飞翼构型的湿表面积更大,从而摩擦阻力也大,因此在零升力状态下,其阻力比传统的水下滑翔机大50%~100%;
(2)采用飞翼构型的水下滑翔机的升阻比最大可达25~30,而采用传统对称构型的水下滑翔机即使在搭载了高展弦比水翼的情况下,其最大升阻比只能达到5左右。
综上所述,传统的水下滑翔机更适合在小攻角、大滑翔角的状态下工作,此时对升力的要求不高,有利于其发挥小攻角下阻力小的优点;而采用飞翼构型的水下滑翔机则更适于大攻角、小滑翔角的滑翔姿态,此时能充分发挥其升阻比大、滑翔经济性高的优势。美国海军利用飞翼概念设计的原型机XRay[51]如图7所示。

图8 天津大学研制的混合驱动水下滑翔机Fig.8 Hybrid-driven underwater glider of Tianjin University
混合驱动水下滑翔机的设计目标就是寻求一种既具有超长航程又有水平航行能力及较高机动性的新型水下航行器。该航行器实现途径以结合水下滑翔机和水下自航行器两种航行器的主要功能来完成,其技术关键是实现航行器平台上集成浮力驱动和螺旋桨驱动两种驱动方式[52]。相对于传统的水下滑翔机,混合驱动水下滑翔机增加了舵和螺旋桨的阻力,这部分阻力会减小滑翔状态下的航程。以天津大学研制的混合驱动水下滑翔机为例,如图8所示,根据攻角的不同,螺旋桨和舵所产生的阻力占整个航行器总阻力的比值大约在10%~35%,这意味着其航程会比传统的水下滑翔机减小10%~35%。因此,混合驱动水下滑翔机的设计是在航程和机动性之间的折中。更多关于国外混合驱动水下滑翔机的介绍可以参考文献[53]。
5 展 望
目前,研究水下滑翔机水动力性能的方法主要有三种:理论/经验公式、数值计算和试验研究。流体动力学是一门古老的学科,至今已有几百年的历史,在其漫长的发展过程中,发展了丰富的计算理论,给出了大量用于计算升力和阻力的理论和经验公式[54-55]。近年来,随着计算机技术的发展,已经出现了Fluent等大型商用计算流体力学软件。但是,在使用商用软件进行计算时,发现了一些与传统理论不相符的异常现象,比如文献[44]中提到的水翼升阻比不随其展弦比单调变化的现象。究竟是发展新的理论来解释这些异常现象,还是发展精度更高的数值计算方法以期消除这些异常现象,是值得探索的问题。同时,就实验本身而言,不同的实验手段也会得到完全不同的结论。文献[48]分别采用水池实验和风洞试验对三角形平板翼和带拱度的矩形翼的水动力性能进行了对比研究,却得到了相反的实验结果:水池试验中,三角翼的水动力性能更优,而在风洞试验中,带拱度的矩形翼更佳。是试验本身的原因、流体介质的影响,还是其他什么因素的作用,这些都还有待探索。
就水下滑翔机水动力外形的研究而言,目前看来已经比较详细,相关的文献很多。在不久的将来,一些新的设想或者新的用途或许会给水下滑翔机水动力外形的研究提出新的要求。研究表明,带拱度的水翼其水动力性能优于对称型水翼,同时其失速角也更大[48]。那么,我们是否可以采用不对称的设计形式,而让水下滑翔机在每次下潜和上浮之间绕其纵轴旋转180°,以保证在下潜和上浮时均能获得更加优良的水动力性能。
或许在不久的将来,会如Stommel所描述的那样,在全球各大海域有着大量的水下滑翔机编队进行实时的海洋环境监测工作。同时,水下滑翔机由于其不依赖于螺旋桨推进,可以利用浮力驱动,因而噪声极低的特点,在军事方面亦有着广阔的应用前景。如何把水下滑翔机的优点应用到载人潜水器上,让科学家也能像鱼那样在海洋中自由来往更是一个非常值得期盼的发展方向。
[1]Broad,William J.Rocket plunge to deep end of the planet[M].Published by New York Times,March 19,2012.
[2]Hawkes ocean technologies,deep flight winged submersibles[J/OL].online available at:http://www.deepflight.com/.
[3]英探险家“挑战”卡梅隆将潜大西洋最深海沟[EB/OL].2012-04-05,http://sports.xout.cn/ssyd/88833.html.
[4]崔维成,胡 震,叶 聪,潘彬彬.深海载人潜水器技术的发展现状与趋势[J].中南大学学报(自然科学版),2011,42(增 2):13-20.
[5]李志伟,马 岭,崔维成.小型载人潜水器的发展现状和展望[J].船舶力学(待发表).
[6]Stommel H.The slocum mission[J].Oceanography,1989,2(1):22-25.
[7]Leonard N E,Graver J G.Model-based feedback control of autonomous underwater gliders[J].IEEE Journal of Oceanic Engineering,2001,26(4):633-645.
[8]Sherman J,Davis R E,Owens W B,et al.The autonomous underwater glider “Spray”[J].IEEE Journal of Oceanic Engineering,2001,26(4):437-446.
[9]Eriksen C C,Osse T J,Light R D,et al.Seaglider:A long-range autonomous underwater vehicle for oceanographic research[J].IEEE Journal of Oceanic Engineering,2001,26(4):424-436.
[10]Webb D C,Simonetti P J,Jones C P.SLOCUM:An underwater glider propelled by environmental energy[J].IEEE Journal of Oceanic Engineering,2001,26(4):447-452.
[11]Fiorelli E,Bhatta P,Shulman I.Adaptive sampling using feedback control of an autonomous underwater glider fleet[C]//Proceedings 13th International Symposium on Unmanned Untethered Submersible Technology.Durham,US,2003,12(5):125-145.
[12]Bachmayer R,Leonard N E,Graver J,et al.Underwater gliders:Recent developments and future applications(invited paper)[C]//Proc.IEEE International Symposium on Underwater Technology(UT′04).Taipei,Taiwan,2004.
[13]Bhatta P,Fiorelli E,Lekien F,et al.Coordination of an underwater glider fleet for adaptive ocean sampling[C]//Proc.International Workshop on Underwater Robotics.Genoa,Italy,2005.
[14]Graver J G,Bachmayer R,Leonard N E.Underwater glider model parameter identification[C]//Proceedings 13th International Symposium on Unmanned Untethered Submersible Technology.Durham,US,2003.
[15]Davis R E,Eriksen C C,Jones C P.Autonomous buoyancy-driven underwater gliders.The Technology and Applications of Autonomous Underwater Vehicles[M].Griffiths G,ed.Taylor and Francis,London,2002:324.
[16]程雪梅.水下滑翔机研究进展及关键技术[J].鱼雷技术,2009,17(6):1-6.
[17]Graver J G,Leonard N E.Underwater glider dynamics and control[C]//In Proceeding of 12th International Symposium on Unmanned Untethered Submersible Technology.Durham,NH,2001.
[18]Tomoda Y,Kawaguchi K,Ura T,et al.Development and sea trials of a shuttle type AUV Albac[C]//In Proceeding of 8th International Symposium on Unmanned Untethered Submersible Technology.Durham,NH,1993:7-13.
[19]Graver J G.Underwater gliders:Dynamics,control and design[D].Princeton University,2005.
[20]Moitie R,Seube N.Guidance and control of an autonomous underwater glider[C]//In Proceeding of 12th International Symposium on Unmanned Untethered Submersible Technology.Durham,NH,2001.
[21]俞建成,张奇峰,吴利红等.水下滑翔机器人运动调节机构设计与运动性能分析[J].机器人,2005,27(5):390-395.
[22]俞建成,张奇峰,吴利红等.水下滑翔机器人系统研究[J].海洋技术,2006,25(1):6-10.
[23]张奇峰,俞建成,唐元贵等.水下滑翔机器人运动分析与载体设计[J].海洋工程,2006,24(1):74-78.
[24]王长涛,俞建成,吴利红等.水下滑翔机器人运动机理仿真与实验[J].海洋工程,2007,25(1):64-69.
[25]武建国,陈超英,王延辉等.水下滑翔器浮力驱动效率分析[J].机械工程学报,2009,45(4):172-176.
[26]武建国,陈超英,王树新等.混合驱动水下滑翔器滑翔状态机翼水动力特性[J].天津大学学报,2010,43(1):84-89.
[27]马冬梅,马 铮,张华等.水下滑翔机水动力性能分析及滑翔姿态优化研究[J].水动力学研究与进展,2007,22(6):704-708.
[28]Ma Z,Zhang H,Zhang N,et al.Study on energy and hydrodynamic performance of the underwater glider[J].Journal of Ship Mechanics,2006,10(3):53-60.
[29]Li Y H,Wu B S,Zhang H,et al.A study on numerical simulation of the unsteady motion for the underwater vehicle[C]//Sixth International Symposium on Underwater Technology.Wuxi,China,2009.
[30]倪园芳,马 捷.水下滑翔机动力系统工作性能的研究[J].舰船科学技术,2008,30(3):82-87.
[31]倪园芳,马 捷,王俊雄.水下滑翔机浮力系统的机理和调节性能[J].船海工程,2008,37(2):95-99.
[32]赵 伟,杨灿军,陈 鹰.水下滑翔机浮力调节系统设计及动态性能研究[J].浙江大学学报(工学版),2009,43(10):1772-1776.
[33]曾庆礼,张宇文,赵加鹏.水下滑翔机总体设计与运动分析[J].计算机仿真,2010,27(1):1-5.
[34]阚 雷,张宇文,范辉等.浮力驱动式水下滑翔机运动仿真[J].计算机工程与应用,2007,43(18):199-201.
[35]邵 鑫,石秀华,曹永辉等.水下滑翔机的运动模型建立及仿真[J].计算机仿真,2009,26(11):33-37.
[36]王 冲,张志宏,顾建农等.水下滑翔机原理样机设计与分析[J].固体力学学报,2008,29:183-185.
[37]王 冲,刘巨斌,张志宏等.水下滑翔机沿纵剖面滑行时水动力特性计算与分析[J].舰船科学技术,2009,31(1):134-136.
[38]朱继懋主编.潜水器设计[M].上海:上海交通大学出版社,1992.
[39]施生达主编.潜艇操纵性[M].北京:国防工业出版社,1995.
[40]胡 克,俞建成,张奇峰.水下滑翔机器人载体外形设计与优化[J].机器人,2005,27(2):108-112.
[41]Stevenson P,Furlong M,Dormer D.AUV design:Shape,drag and practical issues[J].Sea Technology,2009,50(1):41-44.
[42]Huggins A,Packwood A R.Wind tunnel experiments on a fully appended laminar flow submersible for oceanographic survey[J].Ocean Engineering,1995,22(2):207-221.
[43]Gertler M.Resistance experiments on a systematic series of streamlined bodies of revolution-For application to the design of high-speed submarines[R].DTMB Report C-297,Naval Ship Research and Development Centre,Washington D.C.,1950.
[44]李志国,朱鹏程,李 锋.小展弦比机翼低雷诺数升阻特性试验研究[J].流体力学实验与测量,2004,18(4):78-82.
[45]夏国泽主编.船舶流体力学[M].武汉:华中科技大学出版社,2003.
[46]吴利红,俞建成,封锡盛.水下滑翔机器人水动力研究与运动分析[J].船舶工程,2006,28:12-16.
[47]李天森主编.鱼雷操纵性[M].北京:国防工业出版社,1999.
[48]Drew B A.Measurement methods and analysis:Forces on underwater gliders[R].Annapolis:US Naval Academy,2002.
[49]Arima M,Miwa Y,Ikebuchi T.Performance assessment of an underwater glider with independently controllable main wings by CFD analysis[C]//Sixth International Symposium on Underwater Technology.Wuxi,China,2009.
[50]何漫丽.水下自航行器水动力学特性数值计算与试验研究[D].天津:天津大学机械工程学院,2005.
[51]Liberdade XRay advanced underwater glider[J/OL].online available at:http://www.onr.navy.mil.
[52]武建国.混合驱动水下滑翔器系统设计与性能分析[D].天津:天津大学机械工程学院,2010.
[53]Jenkins S A,Humphreys D E,Sherman J,et al.Underwater Glider System Study[R].Technical report,Office of Naval Research,USA,2003.
[54]Hoerner S F.Fluid dynamic drag[M].Published by the author,Midland Park N J,1965.
[55]Hoerner S F,Borst H V.Fluid dynamic lift[M].Published by Mrs.Hoerner L A,Midland Park N J,1985.