一种去抖动的运动目标检测方法
2012-03-12卢志茂殷梦妮
卢志茂,殷梦妮
(哈尔滨工程大学信息与通信工程学院,哈尔滨150001)
在视频监控系统中检测运动目标,是计算机视觉研究领域的一个重要课题.当前用于静止背景下运动目标检测的主流方法主要有3种:背景减除法、帧间差分法、光流法[1].但是在大多数情况下无法保证摄像机保持静止,例如风吹等原因造成摄像机发生偏移;当汽车路过,由于震动等原因造成摄像机发生晃动等情况,这些现象统称为视频抖动.由于抖动现象的存在,我们无法再用静止背景下的运动目标检测方法对目标进行检测.通常采用运动估计和运动补偿的方法来对目标进行检测.
运动估计的方法是决定运动目标检测好坏的重要环节,当前运动估计的方法主要有以下几个方面:基于光流的方法、基于块的方法、基于特征的方法、像素递归的方法、最大后验概率密度估计方法等[2].其中基于块的运动估计方法由于具有实现简单、计算量小的特点而广泛应用[3].
基于块的运动估计方法可以理解为将当前帧图像分为若干块,对当前帧中的每一块,在参考帧的搜索窗口内搜索得到最佳的匹配块.搜索最佳匹配块最准确的方法就是全搜索算法,但由于全搜索算法需对搜索块内所有的像素点进行计算,因此计算时间很长,很难保证实时性.因此,近些年来出现了很多基于块运动估计的改进方法,这些方法都是在保证效果尽量与全搜索方法差不多的情况下,使计算时间能有所提高.例如,文献[3]采用结合灰阶比特平面匹配和菱形搜索策略得到初步的估计结果,然后在其附近再以最小绝对差MAD为测度,使搜索结果更为准确.文献[4]采用将当前帧图像分块,取梯度值总数最大的一块作为背景特征区域块.然后对当前帧的背景特征块使用最小绝对差和匹配准则和3步法搜索策略在前后相邻帧中进行块匹配,以获得背景运动矢量.文献[5]首先将序列图像切分为r×c大小的视频窗口,然后提取窗口内区域图像累积帧间差矩阵的简单统计特征,针对每一帧序列图像,将视频窗口进行分类,把它们划分为运动目标窗口和非运动目标窗口(包括静止背景窗口和波动式干扰窗口),最后将运动目标窗口合并为运动目标.文献[6]在自适应十字搜索块匹配算法的基础上,根据小波域中各图像之间的相关性,提出一种分层块匹配算法——基于小波变换的改进的自适应十字模式搜索算法,该方法在小波变换域完成匹配块的搜索,有效地减少了匹配点的搜索个数.文献[7]采用一种块内降采样的新三步搜索算法,该算法利用图像的局部相似性特征,对搜索块的内部像素采用交叉采样方式做块匹配的运算以降低算法复杂度.
尽管众多学者对基于块的运动估计方法进行了不同的改进,但是基于块的运动估计中大多数都是固定搜索模式步长的,若搜索步长太大,会引起不必要的过搜索,导致块运动估计精度下降;若搜索步长过小,则会导致搜索时间变慢.本文采用传统三步法的思想对钻石搜索法的块运动估计的方法进行改进,对具有抖动的视频进行运动目标检测.实验结果表明该方法可以有效解决搜索步长过大或过小,使估计精度提高,对具有抖动的视频目标进行有效检测.
1 块运动估计模型
运动估计可以理解为同一个目标在两帧图像之间的位置差.在基于块的运动估计中,我们假设块内的每个像素只做平移运动.实际上块内的每个像素点的运动不一定都相同,但是当块选取的较小时,就以将其视为只做平移的运动.
1.1 块匹配算法
块匹配算法就是将当前帧图像划分为块,针对每一个块,在参考帧中的某一搜索范围内搜索最佳匹配块.其具体做法如图1.
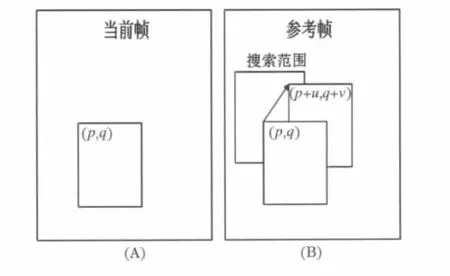
图1 块匹配算法
图1(A)为当前帧中选定的某一个块,其起始坐标为(p,q).在参考帧中的搜索范围内寻找一个同样大小的最佳匹配块,其运动的向量为(u,v).
1.2 最佳匹配准则
在搜索范围内寻找一个同样大小的匹配块,可能会不止一个,那么要确定一个最佳匹配块就需要确定最佳匹配块准则.可采用的最佳匹配准则有最小均方误差(MSE)准则和最小平均绝对值差(MAD)准则.
1.2.1 最小均方误差(MSE)准则

在上述公式中,块的大小为N×N,左上角的坐标为(p,q),运动向量为(u,v),I1和I2分别为当前帧和参考帧.
在求得MSE后,最佳匹配块的运动向量为使MSE达到最小的向量,其公式如下:

1.2.2 最小平均绝对值差(MAD)准则
在实际的计算过程中,为了减少计算量,也经常采用MAD准则,其公式如下:

其中变量的定义同上述公式(1),其运动向量(u,v)的定义如下:

因最小平均绝对差值(MAD)准则较为简单,因此,本文中采用MAD准则来实现寻找最佳匹配块.
1.3 全搜索块匹配算法及图像质量判定的标准
全搜索块匹配算法,即在搜索范围内的所有的像素点计算块匹配误差MAD.寻找完最佳匹配块后,得到块运动向量(u,v),经过块运动补偿,来补偿当前帧的局部抖动.
经过图像的运动估计和补偿后,可以得到去抖动后的视频图像.得到的视频图像质量的好坏评定标准如下式:

上式中,Imax是图像视频信号的峰(最大值),一般取值为255.
2 快速的块运动估计算法
虽然全搜索块匹配算法在搜索最佳块匹配方面是最准确的[2],但是由于其需要计算每一个像素点的最小误差,耗费许多时间.为此出现了很多快速的块运动估计算法,它们仅仅在搜索的准确度上略微比全搜索块匹配算法有些下降,具体有:二维对数搜索法(2-D logarithmic search,LOGS)、3步搜索法(Three-step search,TSS)、新3步搜索法(New three-step search,NTSS)、4步法(Fourstep search,FSS)、菱形搜索法(Diamond search,DS)等[8].其中,DS菱形搜索法因其计算快,效果较好等优点被MPEG-4VM所采用.
2.1 3步搜索法
3步搜索法(TSS),是一种快速的块运动估计算法.它的搜索过程如图2所示.
如图2所示,3步搜索法的搜索过程为: 1)先在搜索范围内寻找原点(0,0),以最大搜索长度的一半为搜索步长,计算原点与周围临近8个点的匹配误差,并找到最小匹配误差.
2)以此最小匹配误差的点为中心,步长减半,再在周围临近的点中寻找最小匹配误差.
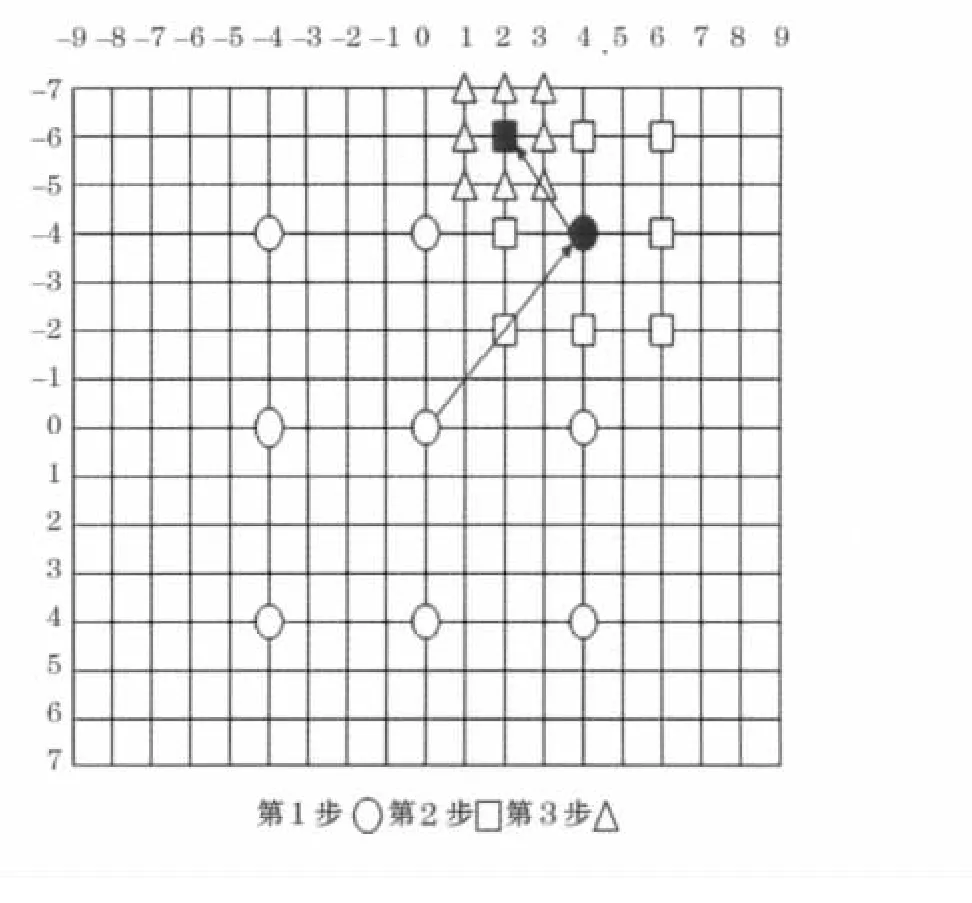
图2 3步搜索法示例图
3)直到搜索的步长为1时,停止搜索.
3步搜索法,在计算的第一步时计算的步长比较大,对于运动较大的序列能快速找到局部的极小值点,计算简单方便.
2.2 菱形搜索法
菱形搜索法(DS),也是一种快速、高效的块搜索方法.被广泛应用在MPEG-4VM等应用设备当中.DS搜索方法有两种搜索模式,一种是大菱形块搜索(LDSP);另一种是小菱形块搜索(SDSP),详见图3(A)和(B).两种方法结合在一起使用.其搜索步骤如下所示:
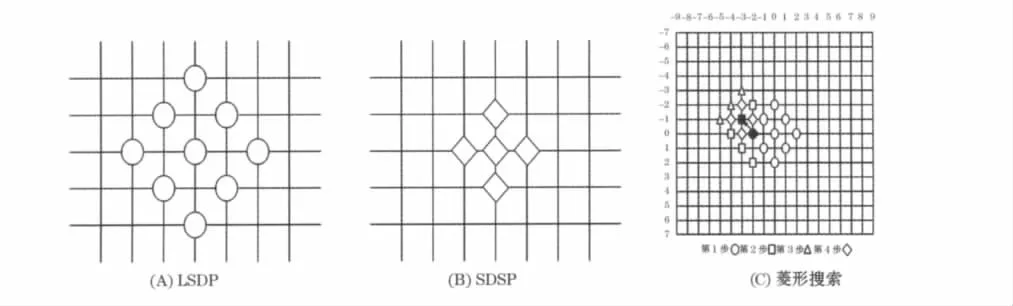
图3 菱形搜索法示例图
1)将大菱形搜索模块(LDSP)的中心放在搜索范围的原点上,比较大菱形搜索模块(LDSP)上的九个点的匹配误差,如果中心点上的匹配误差最小,则转向步骤3.否则,如果匹配误差最小点在其他的点上,则转向步骤2.
2)以上一步找到的匹配误差最小点为中心点,形成新的大菱形搜索模块(LDSP),此时只需再多计算3~5个新的匹配误差点即可.如果最小匹配误差点为中心点,则转向步骤3.否则,重复执行步骤2.
3)将大菱形搜索模块(LDSP)转为小菱形搜索模块(SDSP),小菱形搜索模块(SDSP)上最小搜索误差点的坐标为最终求解的运动向量.
菱形搜索法的搜索方法示意图如下图2(C)所示.
菱形搜索法(DS),计算简单、高效、计算时间短.能广泛用于MPEG-4VM等应用设备当中.
3 改进菱形搜索法运动估计
虽然菱形搜索法(DS),能计算简单、高效.但若搜索方式和实际的运动图像序列不符时,就会出现过搜索或欠搜索现象.若搜索步长太大,会引起不必要的过搜索,导致块运动估计精度下降;若搜索步长过小,则会导致搜索时间变慢.同时,菱形搜索法在搜索运动步长较大的运动图像时,因其固定的搜索模式,导致菱形搜索法的效果变差.而3步搜索法因其搜索步长较大,所以在运动较快速的视频图像上效果较好,但是在运动速度较慢的视频图像上效果没有菱形搜索法的效果好.因此本文利用3步搜索法的思想来改进菱形搜索法来对含有抖动的图像进行运动估计,之后再采用运动补偿方式将图像去抖动,最后采用帧差法对视频图像进行运动目标检测.
本文改进菱形搜索法的处理流程为:
1)先在搜索范围内寻找原点(0,0),以最大搜索长度的一半为搜索步长,计算原点与周围临近8个点的匹配误差,并找到最小匹配误差.
2)将大菱形搜索模块(LDSP)的中心放在最小匹配误差的点上,比较大菱形搜索模块(LDSP)上的九个点的匹配误差,如果中心点上的匹配误差最小,则转向步骤3.否则,如果匹配误差最小点在其他的点上,则转向步骤3.
3)以上一步找到的匹配误差最小点为中心点,形成新的大菱形搜索模块(LDSP),此时只需再多计算3~5个新的匹配误差点即可.如果最小匹配误差点为中心点,则转向步骤4.否则,重复执行步骤3.
4)将大菱形搜索模块(LDSP)转为小菱形搜索模块(SDSP),小菱形搜索模块(SDSP)上最小搜索误差点的坐标为最终求解的运动向量.
4 实验结果与分析
为验证本文提出算法的有效性和鲁棒性,本文选择的测试视频为某城市主干道的视频图像分辨率为320×240、摩托车的视频图像分辨率为176× 144和高速公路测试视频图像分辨率为320×240.本实验在T4200 2.00 GHz CPU、内存2 G的普通PC机上完成,图4~6为本实验采用方法的最终效果图.表1~3为实验分别通过3步搜索法、菱形搜索法与本文采用的方法在平均计算点数、PSNR及计算时间方面作对比.
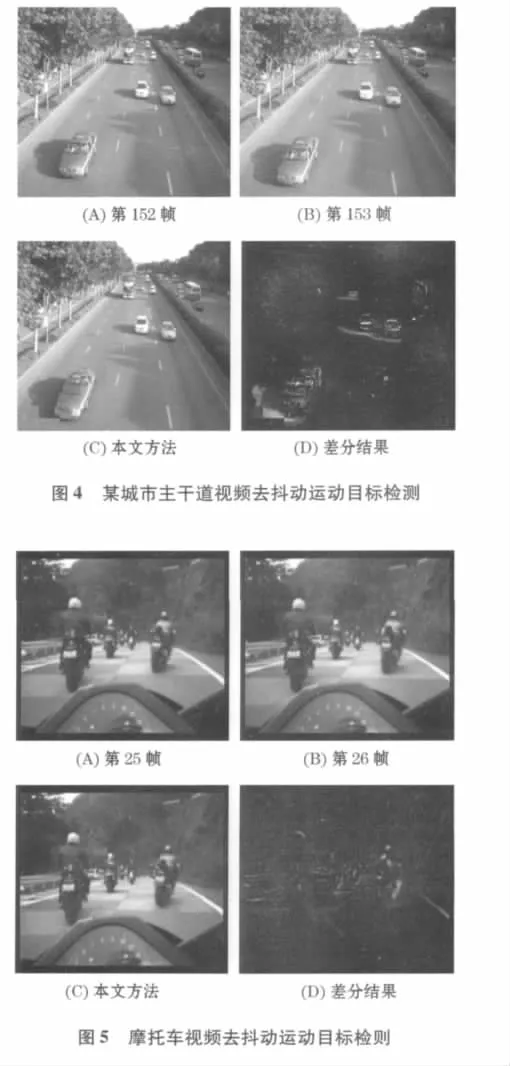
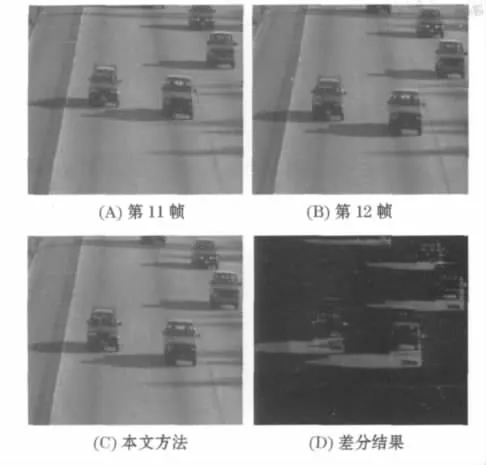
图6 高速公路视频去抖动运动目标检测
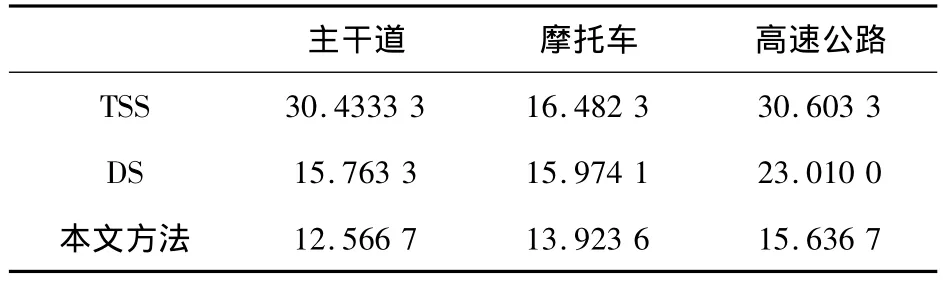
表1 不同算法中的平均计算点数比较
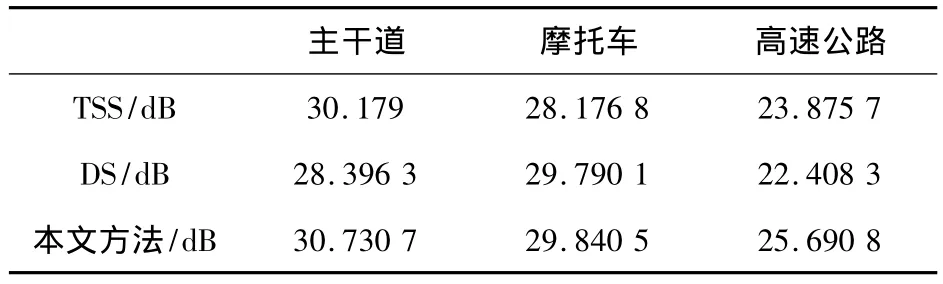
表2 不同算法中的PSNR比较
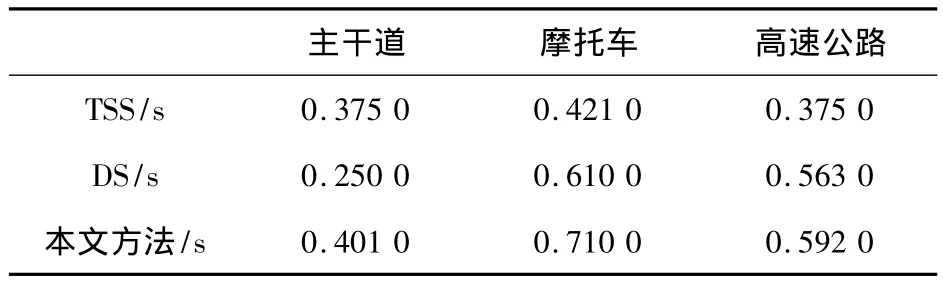
表3 不同算法中的计算时间比较
通过以上对比实验可以看出,虽然本文所采用的方法在计算时间上稍微比三步搜索法和菱形搜索法慢一些,但是在平均搜索点数及PSNR去抖动后的图像效果方面却大大增强.可以有效的去除抖动给视频带来的影响.
5 结语
针对具有抖动的视频图像不能采用静止背景运动目标检测方法有效的提取出运动目标,同时抖动严重影响了视频图像的质量,本文实现了一种改进的菱形块搜索方法对具有抖动的视频图像进行运动估计,再通过运动补偿有效的将“动”态图像序列转化为静态图像序列,通过帧间差分方法有效检测出运动目标.实验证明,该方法可以有效的去除抖动,同时与传统方法相比,更能有效的提高图像效果质量.
[1] 代科学,李国辉,徐 丹,等.监控视频运动目标检测减背景技术的研究现状和展望[J].中国图像图形学报,2006,11 (7):919-925.
[2] 禹 晶,苏开娜.块运动估计的研究进展[J].中国图形图像学报,2007,12(12):2031-2041.
[3] 罗 军,董鸿雁,沈振康.基于位平面匹配和卡尔曼滤波的视频稳定[J].红外与激光工程,2008,37(2):304-307.
[4] 陆 军,李凤玲,姜 迈.摄像机运动下的运动目标检测与跟踪[J].哈尔滨工程大学学报,2008,29(8):831-835.
[5] 周建锋,苏小红,马培军.一种解决波动式干扰影响的序列图像运动目标检测方法[J].电子与信息学报,2010,32 (2):388-393.
[6] 孙琰癑,何小海,宋海英,等.一种用于视频超分辨率重建的块匹配图像配准方法[J].自动化学报,2011,37(1):37-43.
[7] 许海峰,赵文庆,孙 峥,等.一种基于降采样的块匹配三步搜索改进算法[J].复旦学报:自然科学版,2010,49(6): 653-659.
[8] 王 伟,李 伟.基于可变分块尺寸的多模板运动估计算法[J].自动化学报,2009,35(1):34-38.
