基于驾驶员视认性的畸形交叉口安全视距计算
2012-03-07郭忠印刘天龙周小焕
郭忠印,刘天龙,周小焕
(同济大学道路与交通工程教育部重点试验室,上海 201804)
基于驾驶员视认性的畸形交叉口安全视距计算
郭忠印,刘天龙,周小焕
(同济大学道路与交通工程教育部重点试验室,上海 201804)
针对无信号畸形交叉口有别于规则交叉口的几何特性,以及因几何特性的不同而带来的安全问题,通过分析驾驶员在畸形交叉口处观察相交道路车辆情况的过程与特点,利用多自由度驾驶仿真平台,对驾驶员在畸形交叉口的驾驶操作及视认特性进行实验,并根据实验所得数据,提出基于驾驶员视认性的畸形交叉口安全视距计算方法,从而得到基于驾驶员视认性的畸形交叉口视距的计算,并对畸形交叉口平面设计进行建议改善,以满足安全通行的需求。
畸形交叉口;视认性;驾驶仿真平台
畸形交叉口多因地形、道路规划方案等因素影响而产生,一般出现在国道、省道及城镇公路上,多采用无信号控制,其本身的几何特性(交叉面积较大,车辆通过时间较长等)会导致交通冲突危险性的增加[1],其中,畸形交叉口中车辆安全运行所需视距往往不能够很好的满足这一特点带来的交通问题尤为突出。因此,相对于规则的交叉口而言,如何有效且因地制宜地改善畸形交叉口的安全视距,并提高其交通运行安全性则具有很重要的现实意义。随着道路交通学科的发展,国内外学者对于畸形交叉口安全研究多针对于畸形交叉口宏观设计与改善,多从改善交叉口交角的方面考虑,而对于畸形交叉口驾驶员操作特征方面入手较少。《公路工程技术标准》[2]中指出:“平交口路线应为直线并尽量相交,当必须斜交时,交叉角角度应大于45º。平面交叉点前后各交叉公路的停车视距长度所构成的三角形范围内,应保证通视。”这一方面说明了交叉角度是畸形交叉口的重要特征之一,另一方面也并未涉及到畸形交叉口特殊的几何线性对驾驶员视距的影响。本文基于针对不同交叉角度的畸形交叉口驾驶员视认特性实验研究,提出畸形交叉口特殊的视距计算方法,从而在不能改变交叉口交角的情况下,通过改善视距来提高畸形交叉口的车辆通行安全性。
1 畸形交叉口驾驶员驾驶特点与停车制动分析
1.1 畸形交叉口驾驶特点
驾驶员在行车过程中,其驾驶行为特征有两个方面,即视觉特点和操作特点[3-4]。从视觉特点来说,驾驶员的视野角度内根本无法看清交叉道路上满足停车视距处的交通状况,如图1所示为一个交叉角度为45º的畸形交叉口,其视距三角形满足规范要求,假设车辆行驶速度为60 km·h-1,此时他的视野范围是75º,视距三角形给予驾驶员的视野范围是186º(93º×2),这使得驾驶员若不采取相应措施(比如扭头)便无法得到交叉道路上视距三角形内的交通状况。而此时如果平纵面线形组合存在视距不良等问题,则会加大驾驶员的扭转幅度。
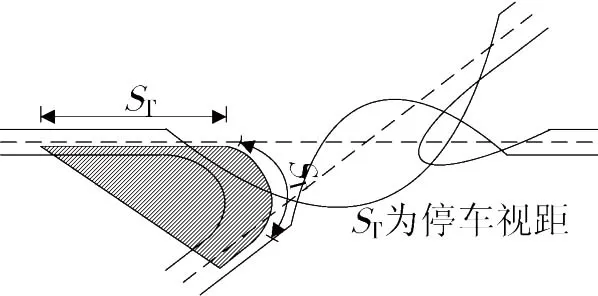
图1 45º畸形交叉口规范规定视距三角形图示Fig.1 Specified sight triangle in 45ºskewed intersection
从操纵特点来说,驾驶员驶及畸形交叉口时,由于在其预瞄区域内无法获得交叉道路上视距三角形内的交通状况,使得驾驶员需要扭头观察判断,进而确定下一步操作,此时,驾驶员的操作变为“转头-观察-回转-感觉-判断-行动”,驾驶员的反应过程变得复杂。若此时交叉口出现视距不良等不易于驾驶员操作的因素,那么这更易导致交通事故的发生,增加了安全隐患。
1.2 畸形交叉口停车制动分析
正是由于畸形交叉口特殊的几何线性以及驾驶员驾驶过程中视觉特点与操纵特点的限制,使得畸形交叉口停车视距的确定方法与规则交叉口有所不同。规则交叉口的停车视距与驾驶员采取行动需要的时间及车辆性能有关,其具体的制动过程可以由图2所示的3个阶段[5-6]确定。
阶段1为制动反应时间,包括驾驶员发现、识别危险物并做出制动决定的时间以及将脚从加速踏板向制动踏板移动的时间和消除间隙时间。即

阶段2为制动力上升时间,即从出现制动力(减速度a)到上升至最大值所需要的时间,即t6;阶段3为全制动时间,即t7;而畸形交叉口中,阶段1中视觉接受时间t1与规则交叉口有所不同,即

式中:t11为驾驶员转头时间,s;t12为驾驶员观察时间,s;t13为驾驶员回转时间,s。
其它阶段与普通交叉口相同,组成部分如图3所示。

图2 规则交叉口驾驶员停车制动过程分析Fig.2 Stopping braking process in normal intersection
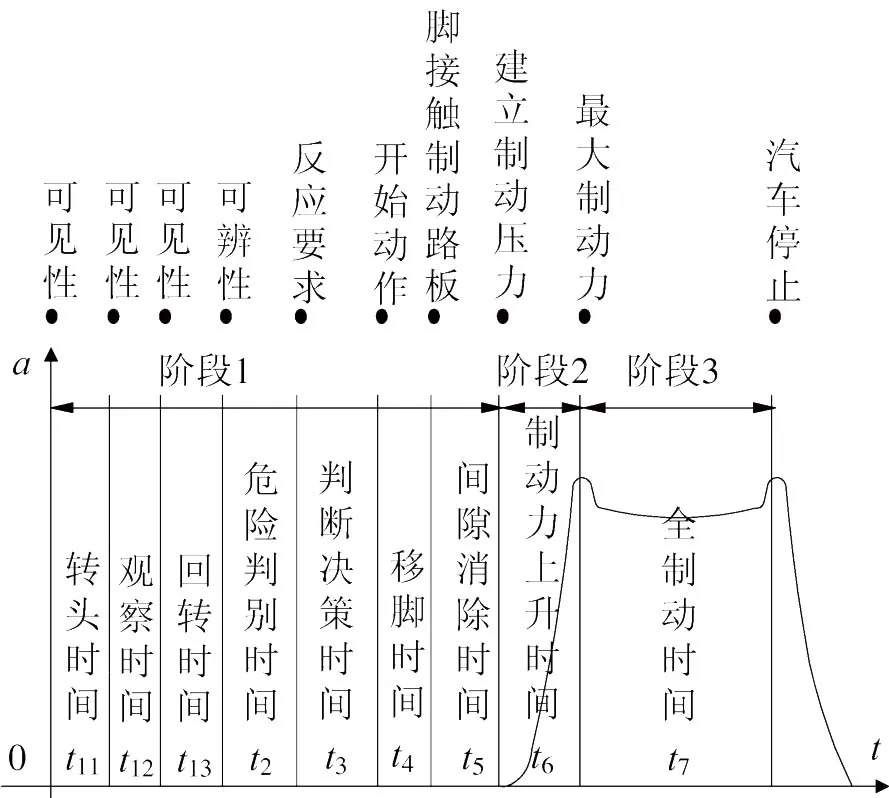
图3 畸形交叉口驾驶员停车制动过程分析Fig.3 Stopping braking process in skewed intersection
由于增加了一部分时间,使得畸形交叉口的停车视距与普通交叉口的停车视距不同。而增加那部分时间的确定,可以通过实验来确定。
畸形交叉口停车视距实验分析。在畸形交叉口中,满足停车视距的驾驶员真实驾驶过程是“获取信息-感觉-制动反应-车辆制动”,因此停车视距问题需要重新审视。采用实验的方式对畸形交叉口的观察进行分析,计算适用于畸形交叉口的停车视距。
1.3 实验设计
本次实验采用同济大学模拟驾驶实验室内的多自由度模拟驾驶仿真平台[7],该驾驶模拟实验平台是中国“985工程”建设项目之一,能够进行类驾驶环境下驾驶员—车辆—交通流—道路设施之间相互作用的机理研究,总体上达到了国内领先、国际先进水平。实验平台由运动系统、控制软件、驾驶舱、投影系统和仿真车辆5部分组成,其主要支撑的研究方向包括:1极限驾驶条件下(如交通事故)驾驶员的因素和反应;2道路设施特性与驾驶员的心理与行为;3交通环境(包括不同交通流环境、自然环境与信息环境)与驾驶员的心理与行为;4人机界面与驾驶员的心理与行为。
实验分别设置45º,60º,75º的畸形交叉口各一个,相交道路为二级公路,设计速度为60 km·h-1;实验路段选择修建于平原处;考虑到实验成本和经费的限制,本次实验选择5名驾驶员分别以速度60 km·h-1和30 km·h-1在实验路段上各实验至少5次;具体实验过程为:每一个畸形交叉口的设置为在满足规范规定的视距三角形范围外,路段其它长度路侧都设置障碍物,使得驾驶员不能在视距三角形外观测到交叉道路的交通状况。待驾驶员行驶至障碍物消失时,也即到达满足规范规定的视距三角形一个端点时,驾驶员需要观测相交道路左方的交通状况,用摄像机记录下这个过程。最后对拍摄视频进行分析,得到每组实验的驾驶员转头、观察、回转的时间,并进行分析,最终得出驾驶员因需要发现交叉道路路况而增加的扭转头部发现目标的时间。
1.4 数据分析与结论
实验得出的数据经过处理后有效数据为157个,汇总如表1。

表1 实验数据汇总表Tab.1 Experimental data summary
通过一系列的实验数据处理分析,得出如下结论。
1)驾驶员每次观察目标,其转头时间t11与回转时间t13基本保持一致。
2)同一运行速度v下,驾驶员行驶在不同交叉角度θ的畸形交叉口中,其转头时间t11随着角度的增加而减小,考虑到车辆在二级公路行驶中其行驶速度往往不会降低很多,所以二者的关系可以用行驶速度v=60km·h-1时的幂指数式:

且随着角度的增加,转头时间t11的减小趋势逐渐变缓;驾驶员行驶在不同交叉角度θ的畸形交叉口中,其观察时间t12基本保持不变,大致为0.3~0.4 s;
3)同一交叉口中,驾驶员以不同速度v行驶观察,其转头时间t11、观察时间t12基本没有变化,也即转头时间t11、观察时间t12与运行速度v无关。
4 应用

畸形交叉口的停车视距分为反应距离和制动距离两部分。反应距离是驾驶员发现前方障碍物,经过判断决定采取制动措施的那一瞬间到制动器真正开始起作用的那一瞬间汽车所行驶的距离。这段时间又可分为“感觉时间”和“反应时间”[9]。其中,与规则交叉口不同的是,畸形交叉口的感觉时间包括驾驶员转头时间t11、观察时间t12、回转时间t13和辨认时间,具体来说驾驶员在其视野内觉察一个目标约需0.4 s的时间,这在之前的实验中已经通过t12得到验证;需要约1 s的时间清晰辨认,这与规则交叉口的相同,但是增加的转头时间与回转时间均可以用前文所述公式(3)来确定。
因此,设计上可以偏安全考虑:感觉时间=1.5+2t11
制动反应时间取1.0 s,感觉和制动反应的总时间T=2.5+2t11,在这个时间内汽车行驶的距离为

式中:v为汽车的行驶速度,设计速度为120~80 km·h-1采用设计速度的85%,60~40 km·h-1采用设计速度的90%,30~20 km·h-1采用原设计速度;t11为畸形交叉口驾驶员转头时间,s,可以用式(3)确定;θ为畸形交叉口的交叉角度。
制动距离S2与规则交叉口的相同,即指汽车从制动生效到汽车完全停住,这段时间内所走的距离[10]。

式中:φ为路面与轮胎之间的附着系数,一般按潮湿状态考虑。f为动阻力系数,它与路面类形、轮胎结构和行驶速度等有关。i为道路纵坡(上坡i>0,下坡i<0)。
故畸形交叉口的停车视距为

现以交叉角度为45º,60º,75º的畸形交叉口为例,根据前文分析,本文研究的畸形交叉口主要为二级公路,其路面多为沥青路面,故φ取值为0.4,f取值为0.015,道路最大纵坡i为6%,取最不利情况,i=-0.06,其停车视距计算见表2。
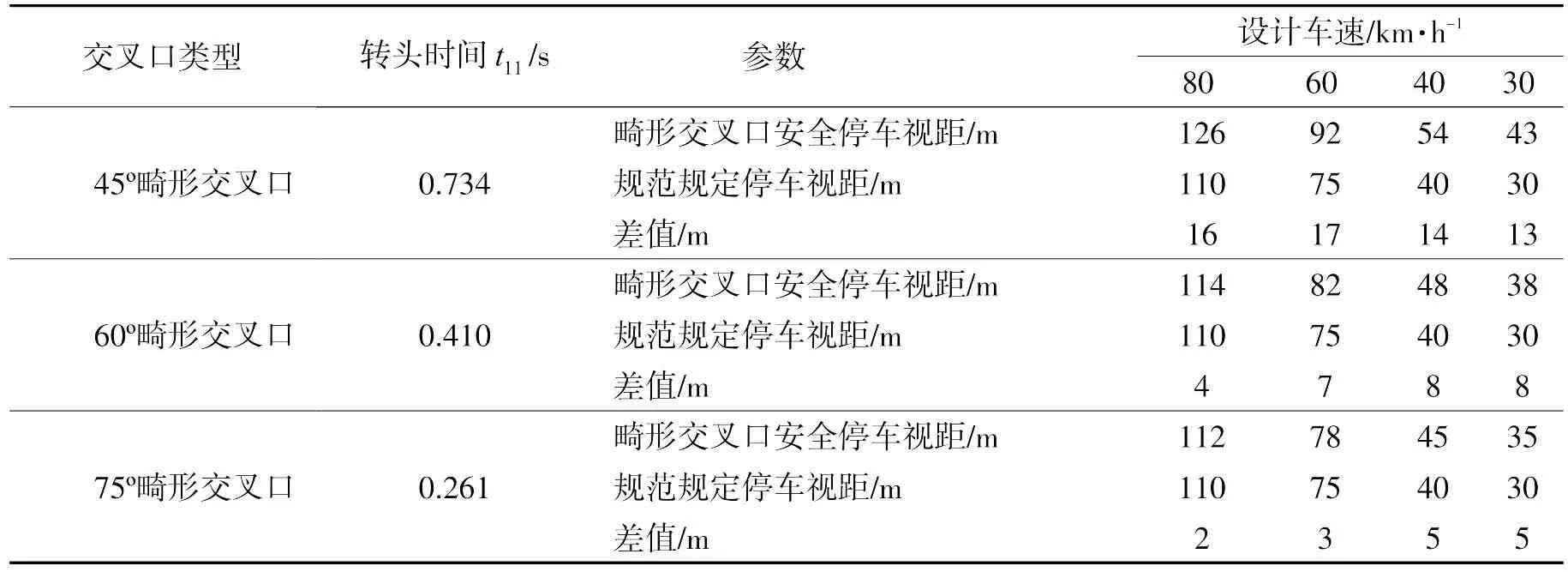
表2 畸形交叉口安全停车视距Tab.2 Safe sight distance in skewed intersection
可见,畸形交叉口安全视距相交与规则交叉口是有所增加的,不同畸形交叉口基于驾驶员视认特性的停车视距与规范规定的停车视距的差值随着交叉角度的变大而逐渐减小,这也反应了畸形交叉口随着交叉角度的增加其交通流运行方式与规则交叉口愈发接近。
5 结语
本文对无信号控制、不同交叉角度的畸形交叉口(45º,60º,75º)设计了畸形交叉口驾驶员以不同行驶速度(30 km·h-1和60 km·h-1)下的视认特性的实验,通过实验分析提出了基于驾驶员视认特性的畸形交叉口安全视距计算方法,为畸形交叉口的安全设计与改善提供了一定的参考。但没有考虑道路上其它交通流及行人的影响,且由于实验仪器精度水平以及畸形交叉口的多样性等方面的限制,对针对于不同畸形交叉口驾驶员驾驶的细节问题带来的安全视距计算的不同仍有待更深入的探讨。
[1]徐家钰,梁家民.X形交叉口的改善[J].上海公路,1997(2):23-29.
[2]中华人民共和国交通部.JTG B01-2003公路工程技术标准[S].北京:人民交通出版社,2003.
[3]潘兵宏,赵一飞,杨少伟.驾驶员的操纵强度与公路几何设计[C]//长安大学特殊地区公路工程教育部重点实验室,《第五届交通运输领域国际学术会议》组委会,第五届交通运输领域国际学术会议论文集:道路工程分册.北京:人民交通出版社,2005:793-797.
[4]王海林,刘仲国,朱凯曼.影响汽车驾驶员行车安全的内在因素分析[J].汽车安全,2002(1):32-42.
[5]袁浩,史桂芳,黄晓明,等.停车视距制动模型[J].东南大学学报,2009,39(4):860-862.
[6]杨超,胡瑜.高速公路汽车安全距离模型[J].华东交通大学学报,2010,27(5):63-66.
[7]张翔;陈雨人;研究型汽车驾驶模拟器有效性确认研究[J].交通信息与安全,2011(2):63-68.
[8]顾宇倩.公路平面交叉口交通安全设计[J].现代管理科学,2008(6):53-55.
[9]杨少伟.道路勘测设计[M].2版.北京:人民交通出版社,2008:122-123.
[10]裴玉龙,马骥.道路交通事故道路条件成因分析及预防对策[J].中国公路学报,2003,16(4):77-82.
ASafety Sight Distance Calculation in the Skewed Intersection Based on the Driver’s Observation Features
Guo Zhongyi,Liu Tianlong,Zhou Xiaohuan
(Key Laboratory of Road and Traffic Engineering,Ministry of Education,Tongji University,Shanghai 201804,China)
Aiming at the safety problems caused by the geometric properties difference between the skewed intersection without signals and the normal intersection,the paper analyzes the process and characteristics of the drivers’observation about the traffic in skewed intersection.The multiple degree-of-freedom driving simulation platforms are used to conduct an experiment about the drivers’driving operation and observation features in the skewed intersection.Based on the data from the experiment and the drivers’observation features,a safety sight distance calculation method that can be used in the skewed intersection is presented.Then,the advice is given on the skewed intersection design to meet the safety requirements.
skewed intersection;observation features;driving simulation platform
U412.35+1
A
1005-0523(2012)03-0046-05
2011-03-26
西部交通建设科技项目(2009 318 791 034)
郭忠印(1962-),男,教授,博士,博导,研究方向为路面和道路安全。