总能量控制在RLV自动着陆中的应用
2012-03-03范淑娜陈欣李春涛
范淑娜,陈欣,李春涛
(南京航空航天大学自动化学院,江苏南京 210016)
引言
自动着陆段是重复使用运载器(RLV)整个飞行过程的最后阶段,是整个飞行任务安全完成的关键阶段,实现自主、安全和精确地着陆是这一阶段追求的目标。无动力飞行和小升阻比特性是RLV自动着陆段最主要的特点,这也增加了轨迹跟踪的难度。RLV自动着陆要求实现下滑轨迹线的精确跟踪,跟踪下滑轨迹线既要对高度通道进行控制,也要对速度通道进行控制。在速度控制通道,采用了阻力板方案[1],它不同于常规的发动机控制方案,阻力板不仅产生阻力,还产生俯仰力矩,在实施速度控制的过程中对升降舵通道有较大的耦合效应;另外,由于阻力板的面积有限,其控制速度的能力和范围也有限,这就对下滑轨迹线的精确跟踪提出了更大的挑战,势必要求控制系统具有很高的控制性能、很强的抗干扰能力以及对初值的不敏感性。
文献[2]采用经典PID控制理论实现了RLV自动着陆段轨迹跟踪,但在存在外界干扰的情况下,速度对高度跟踪的影响比较大,需要对轨迹进行在线调整,这样就增加了自动着陆的复杂度,限制了在工程中的应用。本文采用总能量控制(TECS)原理设计RLV自动着陆控制器,以求确保其具有非线性解耦控制能力以及鲁棒性的同时,设计过程也符合工程应用的需求。
本文将总能量控制原理应用到RLV自动着陆控制器的设计中,根据RLV自动着陆段无动力的特性,通过调节升降舵来协调动能和势能的分配,从而解除RLV纵向飞行轨迹和速度之间的耦合,实现了对纵向模态的非线性解耦控制,确保控制器具有较强的鲁棒性。
1 总能量控制器总体结构
TECS是源于飞行器的能量,所有的控制模态都可以转化为对能量的控制[3-5]。RLV自动着陆段要实现速度和高度指令的跟踪,也可以转化为对能量的控制。基于总能量控制的RLV自动着陆控制器总体结构如图1所示。
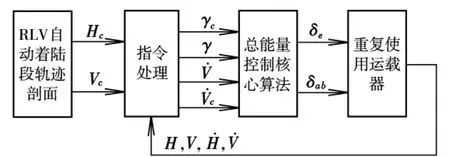
图1 RLV自动着陆控制总体结构
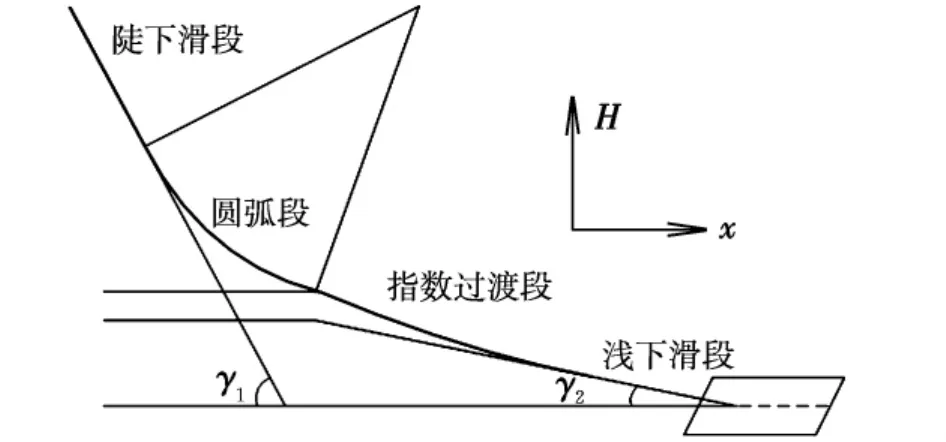
图2 RLV自动着陆段轨迹剖面
RLV的轨迹线由陡下滑段、圆弧段、指数过渡段和浅下滑段组成(见图2)。陡下滑段主要用来消除自动着陆段开始时的能量误差。圆弧段的目的主要是使RLV的轨迹倾角从较大的陡下滑角变为较小的浅下滑角。圆弧段直接接入浅下滑会存在加速度的不连续,在这两段之间加入指数过渡段,使轨迹平滑过渡到浅下滑段,以软化加速度变化过程。
RLV自动着陆段轨迹剖面给出高度指令和速度指令,指令处理模块根据导航系统提供的高度和速度信息,产生总能量控制的指令信号,进而利用总能量控制核心算法产生升降舵和阻力板的控制指令,实现对轨迹剖面的精确跟踪。
2 总能量控制核心算法
飞机的总能量可表示为:

上式表明,飞机飞行过程中,总能量的变化是由阻力变化来控制的[6]。所以,飞机阻力可以用来作为飞机总能量的主控制变量,基于此,可以得到控制飞机总能量变化的控制律:
式中,下标c表示指令信号;下标e表示跟踪误差。
升降舵的偏转主要引起飞机俯仰力矩的变化,改变飞机的飞行姿态,对阻力的影响很小。在阻力板位置不变时,操作升降舵仅改变能量在动能和势能之间的分配关系。所以升降舵可以作为飞机动能和势能的分配控制器。
定义能量分配率为:

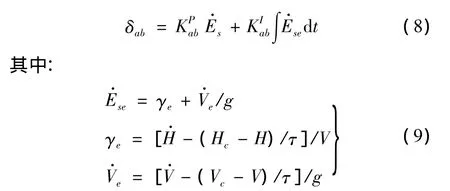
采用PI的控制结构,则升降舵的控制律可写成如下形式(A表示阻尼回路信号):

为了保证短周期模态的动态特性,增加了阻尼项,包括俯仰角和俯仰角速率。式(8)和式(11)构成了总能量控制的核心算法,其结构图如图3所示。
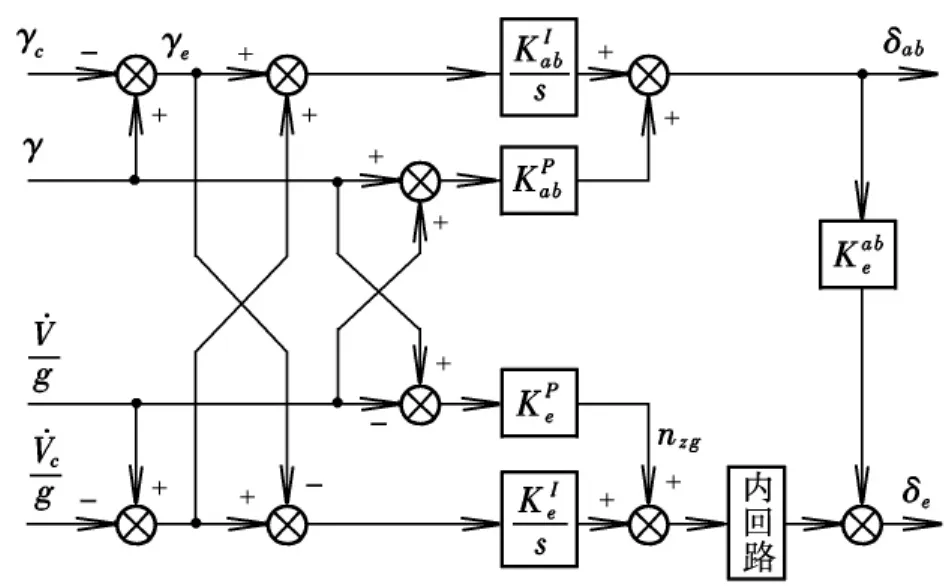
图3 TECS核心算法
比例通道中的和使系统增加了不必要的零点,导致系统响应的超调比较大。本文用和代替了比例项和,这一变化不影响系统的稳定性和带宽等,且控制指令只对积分项起作用,可以使系统响应更加平滑、超调减小。
偏转阻力板直接产生俯仰力矩,导致不必要的升降舵偏转。为了减小阻力板通道对升降舵通道的影响,本文增加了阻力板直接到升降舵的反馈。反馈系数取决于阻力板和升降舵的操作效率的比值。
3 总能量控制器设计
根据RLV着陆段的要求,实现速度和航迹的解耦控制,本文给出了如下控制要求:
(1)速度阶跃响应为10 m/s时,引起的高度偏离平衡值不超过8 m;
(2)高度阶跃响应为10 m时,引起的速度偏离平衡值不超过0.2 m/s。
3.1 TECS参数设计
从式(9)可得:

式(15)表明能量变化率误差通过一个二阶环节变为零,这个二阶环节决定了TECS阻力板通道的动态特性,选择合适的阻尼和自然频率就可以保证TECS具有良好的动态特性。类似的能量分配率误差也是通过一个二阶环节变为零。

3.2 总能量控制器
在自动着陆段选取一典型工作点,利用小扰动方法对RLV自动着陆段非线性模型配平线性化,得到其纵向线性运动模型:

式中,x=[Vt,α,q,θ,H]T为状态量,其中参数分别为空速、迎角、俯仰角速率、俯仰角和高度;u=[δe,δab]为输入量;y=[Vt,H]T为输出量;A,B,C 为系数矩阵。

在典型工作点处利用总能量控制原理设计高度跟踪和速度跟踪控制器,其阶跃响应见图4、图5。
从图4中可以看出,速度改变10 m/s引起的高度扰动最大为3.5 m,满足速度和高度解耦的要求。从式(3)和式(10)可知,速度响应不会引起轨迹角的变化,所以能量变化率和能量分配率应该完全相反,但图4所示的和-相位不完全一致,这也是速度和高度通道存在耦合的主要原因。和相频特性是由阻力板和升降舵的动态特性决定的。
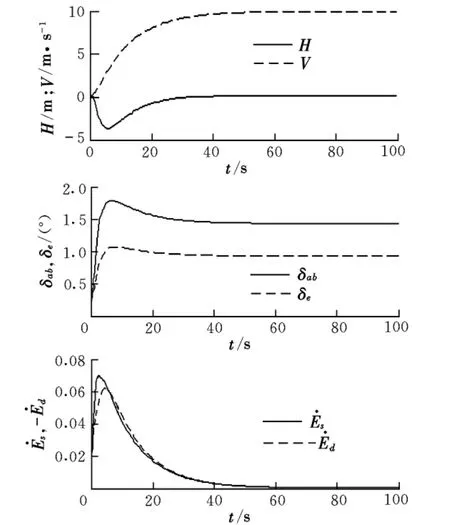
图4 速度阶跃响应

图5 高度阶跃响应
从图5可以看出,高度改变10 m引起的速度扰动最大为0.04 m/s,满足速度和高度解耦的要求。从式(3)和式(10)可知,高度响应引起的能量变化率的改变和能量分配率的改变应完全相同,图5验证了这一结论。
4 仿真验证
以某型RLV自动着陆非线性模型为仿真对象,从离地3 000 m,速度162 m/s开始,到主起落架落在跑道上为止[7]。在不同的初始条件下(标称情况、初始高度存在200 m的误差、初始速度存在15 m/s的偏差),用总能量控制系统对RLV自动着陆段进行控制。高度和速度仿真曲线如图6所示。能量变化率和能量分配率曲线如图7所示。触地时的状态如表1所示,其中Vd为触地速度,ΔH·为下沉率。
从图6、图7可以看出,飞行速度和高度之间的非线性耦合关系已基本解除,在初始高度存在偏差的情况下,速度跟踪最大偏差为1 m/s;在初始速度存在偏差的情况下,高度跟踪最大偏差为10 m,满足总能量控制的要求。指数拉起段能量变化率和能量分配率的相位相反,表明了高度和速度的耦合基本解。
表1表明在各种初始条件不确定的情况下,均满足RLV触地的要求。说明基于总能量的RLV自动着陆控制系统具有较满意的非线性解耦能力,具有较强的鲁棒性。
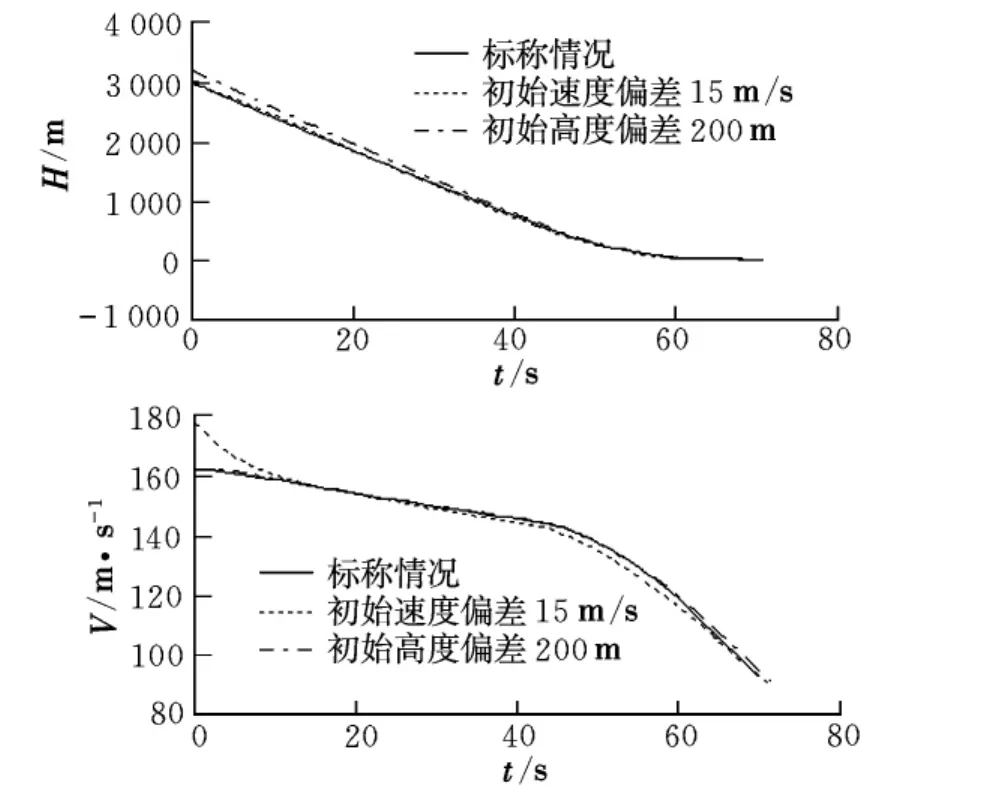
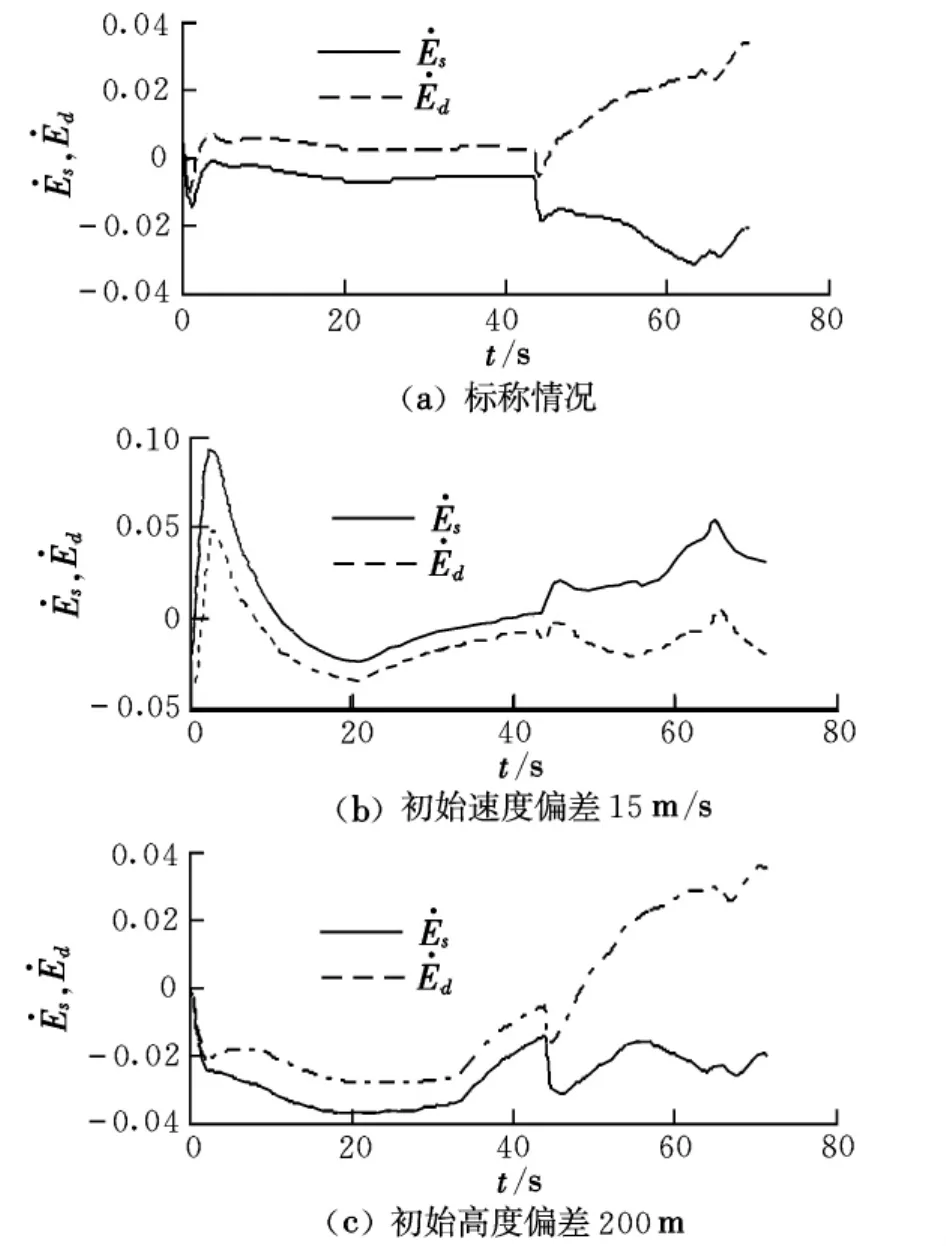
图7 自动着陆段能量变化率和能量分配率曲线
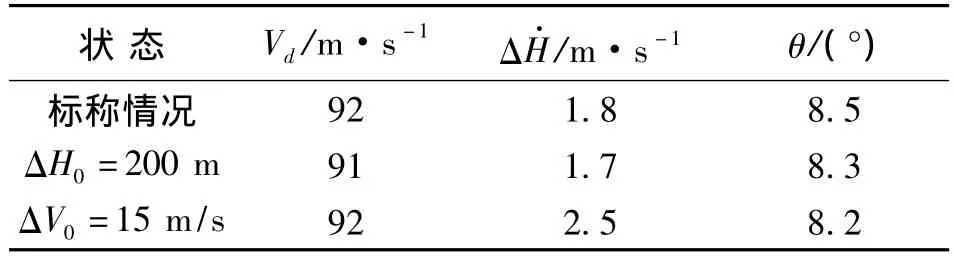
表1 RLV触地状态
5 结束语
本文基于RLV自身的气动特性以及飞行过程中较为苛刻的飞行条件,为了保证RLV实现安全、精确着陆,采用总能量控制的方法设计了其自动着陆控制系统。仿真研究表明,控制系统具有非线性解耦能力和较强的鲁棒性,满足RLV自动着陆的要求。
[1] 孙春贞.重复使用运载器末端区域能量管理和自动着陆技术研究[D].南京:南京航空航天大学,2008.
[2] Kluever C A.Unpowered approach and landing guidance using trajectory planning[R].AIAA-2004-4770,2004.
[3] Lambregts A A.Vertical flight path and speed control autopilot design using total energy principles[R].AIAA-83-2239,1983.
[4] Lambregts A A.Functional integration of vertical flight path and speed control using energy principles[R].NASA Langley Research Center:1st NASA Aircraft Controls Workshop,1983:391-394.
[5] Wu SF,Guo SF.Optimum flight trajectory guidance based on total energy control of aircraft[J].Journal of Guidance,Control,and Dynamic,1994,17(2):235-252.
[6] Kaminer Issac,O’Shaughnessy P R.Integration of fourdimensional guidancewith total energy control system[J].AIAA Journal of Guidance and Control,1991,14(3):564-573.
[7] GustM Taikalas.Space shuttle autoland design[R].AIAA-82-1604-CP,1982.