直升机气动与操纵导数的频域辨识方法研究
2012-03-03朱宇张毅袁东
朱宇,张毅,袁东
(中国飞行试验研究院科技部,陕西西安 710089)
引言
直升机气动与操纵导数表征和决定了直升机的飞行品质,对于直升机设计、飞行控制律设计和直升机飞行试验至关重要,获取准确的直升机气动与操纵导数是评价直升机飞行品质的基础。与理论计算、风洞试验和模型自由飞试验相比,用参数辨识的方法从直升机飞行试验数据中获取直升机气动与操纵导数能准确反映其飞行品质特性。大量研究表明,由于直升机系统振动大、稳定性差、轴间耦合强、飞行试验数据信噪比低和非线性程度高等原因,采用频域辨识方法比时域辨识方法得到的直升机气动与操纵导数更为准确、可靠,这使得频域辨识方法已成为国外直升机气动与操纵导数辨识的重要手段[1-4]。
本文利用地面飞行仿真模拟直升机飞行试验数据作为辨识数据,探索和研究出一种具有工程应用价值的直升机气动与操纵导数频域辨识方法,为今后开展直升机飞行试验获得真实直升机试飞数据作为辨识数据进行频域辨识提供参考。
1 横航向运动辨识模型的建立
实践证明,如果辨识模型结构形式建立得不合适,那么不论采用什么辨识准则和参数估计方法都无法提高辨识结果的准确度[5],因此,选择和建立合适的辨识模型是参数辨识的首要问题,它决定了参数辨识的成败。动力学系统辨识时通常选择系统的基本数学模型作为其辨识模型。本文建立直升机横航向线性化小扰动方程作为辨识模型:

式中,Δv,Δp,Δr,Δφ 分别为直升机机体侧向速度(v)、滚转角速率(p)、偏航角速率(r)和滚转角(φ)的增量;w0,u0分别为基准运动下机体竖轴和纵轴的速度;Y,L,N分别为侧向气动力、滚转力矩和偏航力矩;ΔA1,Δθtr分别为直升机横向周期变距和尾桨距增量;Yv,Yp,Yr,Lv,Lp,Lr,Nv,Np,Nr分别为直升机横航向各气动力导数;YA1,Yθtr,LA1,Lθtr,NA1,Nθtr分别为直升机横航向各操纵导数。Yv为Y对v的偏导数,即∂Y/∂v,其他各导数物理意义与此类似。
2 气动与操纵导数的频域辨识方法
2.1 频域辨识原理
频率响应函数也称为频率响应特性,它描述系统输入输出的幅值关系和相位关系,表示系统的幅频特性和相频特性。从飞行试验数据中求出的直升机频率响应函数H(ω)可以完整描述直升机的响应特性。对直升机辨识模型进行拉普拉斯变换后可以求出其频率响应函数T(ω)。因此,直升机气动与操纵导数的频域辨识可分为三步进行:
(1)从试验数据中求取直升机频率响应函数H(ω);
(2)求出辨识模型频率响应函数T(ω),并建立目标函数;
(3)利用辨识算法对直升机辨识模型中各导数值进行迭代计算,得到对应的T(ω),当T(ω)与H(ω)满足目标函数设定要求时,辨识模型中对应的各参数值即为其辨识结果。
直升机频域辨识基本过程如图1所示。

图1 直升机频域辨识基本过程
2.2 频率响应函数估算式的确定
通常都是通过功率谱密度函数来求取系统频率响应函数的。这是因为使用功率谱密度函数时要用到集合平均,故能最大程度消除噪声的影响,这比直接由傅氏变换求得的频率响应函数要更精确。
功率谱密度是描述信号在频域的统计性质,表示随机信号x(t)的平均功率随频率ω的分布情况。利用功率谱密度可以提取噪声淹没下信号的有用信息。本文采用功率谱密度从直升机试飞数据中求取直升机系统频率响应函数。
对具有有限傅氏变换的平稳随机激励x(t)与随机响应信号f(t),其频率响应函数有三种估算形式:
式中,Gxf(ω)为互功率谱密度;Gxx(ω)为输入自功率谱密度;Gff(ω)为输出自功率谱密度。在没有噪声污染的理想情况下,以上频率响应函数的三种估算形式等价,但实际激励信号和响应信号都受到噪声污染。
通常对典型输入信号的测量是比较精确的,而测量得到的响应信号包含了许多未知的噪声污染。

通常情况下,相干函数的下限值为0.6。低于此下限,辨识结果会产生较大随机误差,等于或高于0.8时,辨识结果更为准确。
2.3 建立辨识模型频率响应函数与目标函数
因此,在本文的系统辨识中假设响应信号只受到噪声污染,此时,式(3)中的H1(ω)为H(ω)的真估计,式(4)和式(5)均为H(ω)的过估计,故采用式(3)来计算直升机频率响应函数。
以上对直升机频率响应函数估算式进行了确定,但在具体计算过程中还必须对信号进行加窗处理,计算信号间的相干函数值等。相干函数是判断飞行试验数据是否满足频域辨识的一种很好的度量。相干函数计算公式为:
式中,ω1和ω2为起始频率和结束频率;nω为频率点,为了简化计算过程nω取为20;l为频率响应对。
使用辨识算法调整直升机辨识模型式的待辨识各导数值,使辨识模型T(ω)的频率响应逼近H(ω)的频率响应,使Jave收敛到设定最小值,则此时辨识模型中各导数值即为辨识结果。
3 算例结果及时域验证与分析
3.1 算例结果
在某直升机模拟器上选择某型典型直升机,在海拔高度Hp=1 000 m,前飞速度V=120 km/h条件下,分别进行两次横向频率扫描所获得的两组试飞数据作为辨识数据(一组数据用作辨识数据;另一组用于时域验证)。图2~图4为Jave收敛到最小值时的频率响应对比图。
从图2~图4的相干函数值可以看出,一般在ω=0.8~10.0 rad/s频率范围内相应的响应和操纵输入之间的线性相关程度比较好。为此在辨识过程中只选择该频率段数据进行辨识,以降低噪声对辨识结果的影响,提高辨识精度。所得的辨识结果如表1所示。

图2 p/A1频率响应对比图
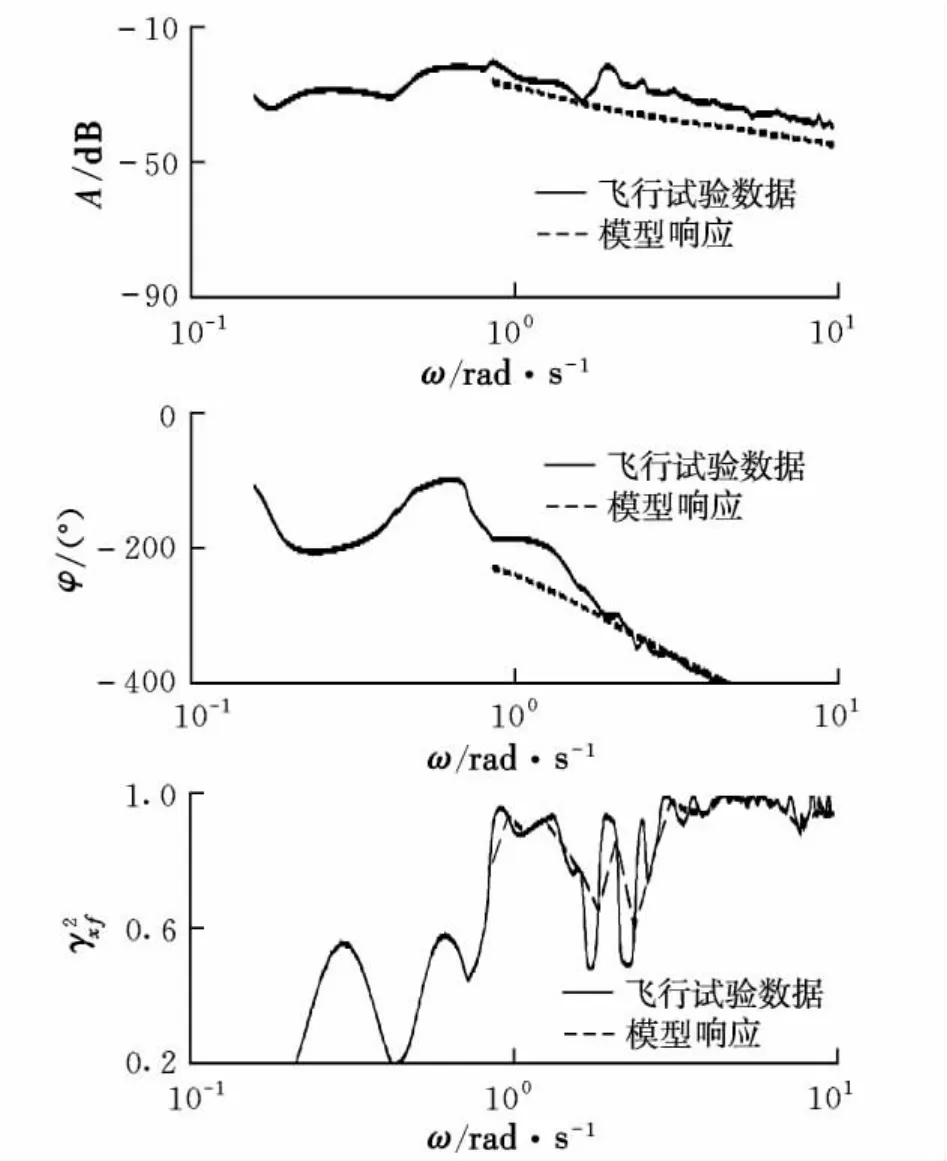
图3 r/A1频率响应对比图
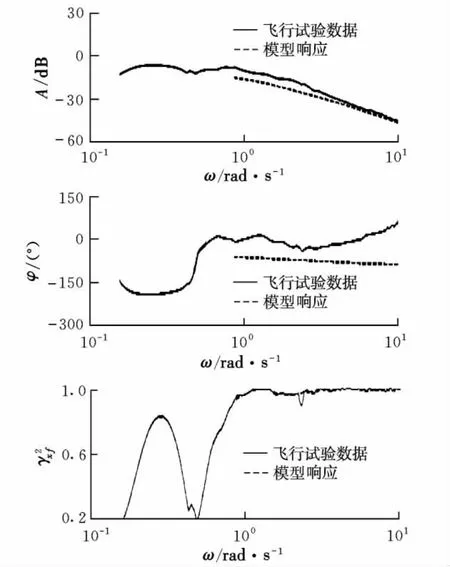
图4 φ/A1频率响应对比图

表1 辨识结果
3.2 时域验证及分析
时域中对辨识结果进行验证是检验辨识结果正确性的重要方法之一。使用在同一飞行状态下没有用来进行导数辨识的飞行试验数据中的操纵输入量作为辨识模型的操纵输入量,对模型的预测输出和对应的飞行试验数据的响应量进行比较。时域验证原理如下。
设v的当前采样点为vn,Δv为增量,下一时刻采样点为vn+1,n=0,1,…,n+1,则有:

设Δt为采样时间间隔,在n+1时刻由式(1)和式(7)可得:
同理,可对其他增量 Δp,Δr,Δφ,ΔA1,Δθtr进行类似的定义,并解得相应的pn+1,rn+1和φn+1,在此不作详述。
根据以上时域验证原理,可以对导数辨识结果进行时域验证。选择横向频率扫描中另一组用于时域验证的数据对辨识结果进行时域验证,验证结果如图5~图7所示。
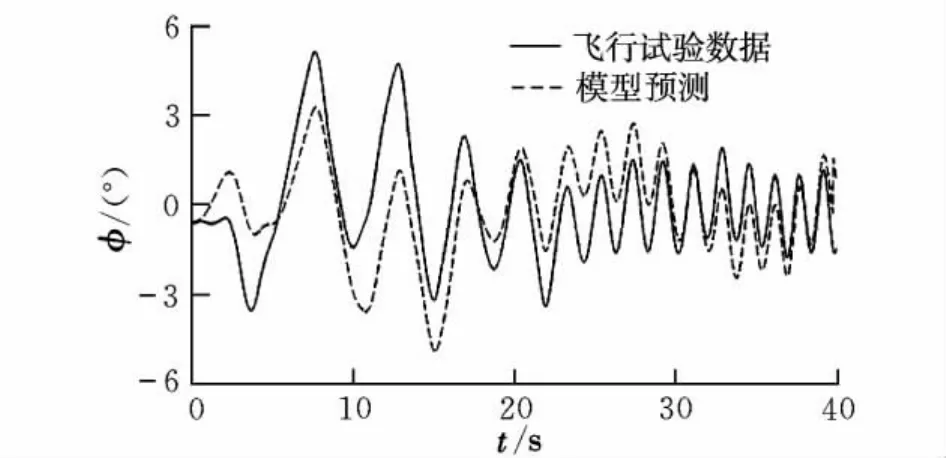
图5 滚转角φ时域检验对比曲线

图6 偏航角速率r时域检验对比曲线

图7 滚转角速率p时域检验对比曲线
可以看出,辨识模型预测的响应与飞行试验数据基本吻合,响应趋势基本一致,其中在高频段的吻合度比低频段好,在低频段吻合相对较差。也就是说,辨识得到的模型对直升机低频段的动力学响应特性的描述相对高频段要差,其根本原因是辨识数据中包含的直升机低频段响应特性的信息较少,用于频域辨识的试验数据应该至少包含有1到2个低频扫描周期输入,然后再平滑过渡到中频和更高的频率扫描阶段。
综上所述,得到的辨识模型能够很好地预测直升机在此飞行条件下的动力学响应特性,辨识得到的各直升机导数是正确和可信的。
4 结束语
本文对直升机导数的飞行试验频域辨识方法进行了探索和研究,采用频域辨识技术实现了直升机横航向气动与操纵导数的辨识。辨识模型预测的响应与飞行试验数据基本吻合,表明本文所建立的频域辨识方法正确、可行,具有一定的工程应用价值。
[1] Tischler M B,Cauffman M G.Frequency-responsemethod for rotorcraft system identification:flight applications to BO-105 coupled rotor fuselage dynamics[J].Journal of the American Helicopter Society,1992,37(3):3-17.
[2] Acree CW,Tischler M B.Determining XV-15 aeroelastic modes from flight data with frequency-domain methods[R].NASA TP-3330,1993.
[3] Tischler M B,Remple R K.Aircraft and rotorcraft system identification:engineering methods with flight test examples[M].AIAA,Education Serics.Virginia:Virginia Polytechnic Institute and State University,2006:15-20.
[4] Fu K H,Kaletka J.Frequency domain identification of BO-105 derivativemodels with rotor degrees of freedom[J].Journal of the American Helicopter Society,1993,38(1):73-83.
[5] 蔡金狮.飞行器系统辨识学[M].北京:国防工业出版社,2003:42-48.
