靶场立靶密集度自动测量技术
2012-02-26李艳娟狄长安
边 鹏,李艳娟,狄长安
(1.北方华安工业集团有限公司,黑龙江齐齐哈尔 161006;2.南京理工大学机械工程学院,南京 210094)
立靶密集度是评价直射式武器系统性能的一个重要指标。目前靶场实用的方法有草席靶法、薄木板法等人工测量方法,该类方法的共同特征是在射击前在指定位置架设好靶板,射击后通过人工测量弹着点的坐标后计算立靶精度。该方法存在一定的局限性,无法分辨连续射击时的弹序;需要人工观测报靶,存在一定的安全隐患;受气象条件、架设方式以及架设人员影响较大,测量精度低;工作效率低,耗费人工物力。基于此,科研工作者纷纷展开了立靶密集度自动检测系统研究。目前立靶密集度自动检测系统按照测量原理来分主要有被动声定位坐标靶和光电坐标靶2种。
1 光电法
1.1 CCD光电测量法
CCD光电测量法包括面阵式和线阵式2种。面阵式CCD光电测量方法主要是通过高速面阵CCD相机拍摄弹丸过靶的图像,然后通过获取的图像解算弹丸过靶的位置信息。CCD面阵测量法又可分为主动式测量和被动式测量法。利用自然光辅助面阵CCD相机捕捉弹丸过靶信号的测量过程称为主动式测量。利用人造光源辅助高速CCD相机拍摄弹丸进行检测的过程称之为被动式测量法。面阵式CCD测量系统组成和操作较为复杂,在使用过程中对相机性能和图像的解算算法要求较高,很难用于较大靶面。
CCD线阵交汇测量一般将两台CCD相机交叉放置,光轴相交点为靶心成90°,2台相机视场交汇区为测试可用靶区,弹丸过靶时会在线阵CCD相机中留下阴影,将阴影转换为灰度并进行二值化处理后可以根据阴影的位置信息求出弹丸过靶坐标。文献[1]中利用CCD交汇法测量弹丸坐标,靶面为3.5 m×3.5 m,最大测量误差1 mm。AVL公司1990年研制的交汇式线阵CCD,靶面为2 m×2 m,可用于大口径弹丸的立靶精度测量。基于线阵CCD的测量方法具备较高的灵敏度,实时性强,但在使用过程中受限于气象、光源和采集图像的处理算法,对于大靶面、高速物体的测量时,CCD很难实施精确测试。
1.2 多光幕法
多光幕测坐标法如图1所示。其中靶1与靶4以间距L放置,靶2与靶1成α1角度放置,靶3与靶4成α2角度放置。可以由弹丸穿过不同靶面时的过靶时间和速度确定穿过靶面的长度,从而确定其坐标。西安工业大学的李晋惠,王铁岭等[2]制作了四光幕天幕靶,用于测试弹丸坐标和速度,7.62 mm弹丸的坐标测试精度不低于3.5 mm。但需要假设弹丸是垂直靶面入射的,而且光幕靶的光幕是锲形的,在不同的高度光幕厚度不一,存在抗光干扰能力较差、探测灵敏度较低、测试区域小,误差影响因素大等问题。

图1 四天幕靶测量弹着点坐标与速度原理图
文献[3]中在四光幕靶的基础上研制了六光幕靶,实验数据表明,对于800 m/s的飞行目标,相邻两靶的间距为500 cm时,六光幕靶系统的测试精度约为±15mm。
1.3 圆弧柱面反射镜和共轭光学法
圆弧柱面反射镜和共轭光学测量法的系统构成如图2所示,M点的激光器垂直于反射镜母线发射激光束,光线经过反射镜反射后被位于N点的该系统的光敏二极管接收,其中M、N点位于共轭位置。当弹丸过靶时引起光通量的变化,光敏二极管检测到该变化后送后续电路处理,形成弹丸过靶形成的通断信号来测量弹着点坐标。
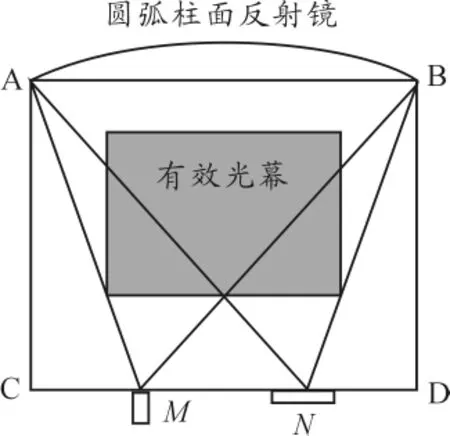
图2 反射镜与共轭光学系统组成测试系统
文献[4]中利用此方法设计了激光光幕靶,能够形成φ600mm,精度0.1%的圆形靶。文献[5]中在该靶的基础上设计了基于微珠玻璃原向反射器和光纤光锥的1 500 mm×1 500 mm靶面的光幕靶,同时改进了激光器件、光学器件和探测器,增强了系统抗光干扰的能力。
圆弧柱面反射镜和共轭光学法测量系统的关键部件光学部件设计较为繁琐,制造加工比较困难;大靶面的扩展需要更大功率的激光器件,因此用该方法进行大靶面的扩展难度较大。需要注意的是,使用该方法测量时,容易受到自然光和曳光弹的干扰,引起多余的干扰信号。
1.4 激光与光电管阵列法
该种方法一般采用光电对射原理,将激光点光源拼接成发射阵列,接收敏感器件组装在一起拼接成接收阵列,发射阵列与接收阵列面对面安装,即在发射阵列与接收阵列之间形成一层光幕。当弹丸通过光幕时,遮挡光幕会引起接收阵列收到的光通量的变化,在对应的位置上的接收阵列将会给出弹丸过靶的通断信号来定位弹丸的坐标。
将激光光源进行合理的拼接可以得到不同尺寸的靶面,不过大靶面的制作需要大量的激光发射和接受器件,而且体积越来越大,调试与运输困难,整体重量和成本难以控制,因此不利于大靶面的扩展。另外激光器的拼接会存在较大的缝隙,存在着某些探测盲区。以上原因,使得采用激光与光电管阵列法制作的光幕靶的有效测试面积收到限制。
英国MSI公司的生产的此类坐标靶,其有效范围2 000 mm×2 000 mm,测速精度3~5 mm。文献[6]与文献[7]分别设计了基于平行激光对射式光电坐标靶,靶面从500 mm×500 cm~4 200 mm×4 200 mm,测量分辨率为2~3 mm,文献[8]中用64对激光管和光电探测器件研制了分辨率为12.5 mm的光幕靶。
1.5 光电法存在的问题
光电法测量弹着点坐标和弹丸速度在响应速度、测量精度等方面存在巨大的优势,同时测量原理简单、直观,易于被接受,但是在使用及推广过程中也存在着一些不足:
1)大靶面的扩展导致系统难度增大。靶面的扩展对机械系统及光学系统的加工精度,接收器件的灵敏度,材料的性能,安装及携带的方便性都提出了严重的挑战。
2)抗光、震动和冲击干扰的能力不足。光学系统抗干扰性能较差,包括发射时强烈的震动与冲击、强光的干扰、生物体的干扰以及发射过程相关产物的干扰等都使得光电系统面临极大的挑战。
2 声靶法
假设超音速飞行的弹丸为一对称的纺锤体,纺锤体前面的激波为头激波,尾部的激波为尾激波,如图3所示。当其经过空气中某点时,引起的激波压力变化曲线如图4所示。由于其形似英文字母N,故常被称之位N波。图4为某型小口径炮弹以1 000 m/s左右速度飞行时产生的激波波形。

图3 对称纺锤体超音速飞行图
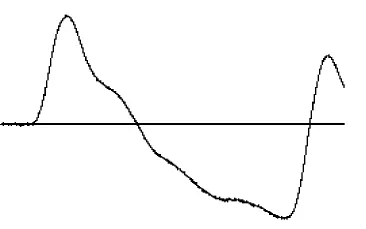
图4 小口径炮弹丸激波波形
声靶法测量弹着点坐标和弹丸速度的原理是通过测量弹丸在空气中超音速运动时所激发的弹丸激波实现定位。事先在某些位置安装激波测量用声音传感器,当弹丸在空气中高速运动时,会引起其周围的空气发生扰动,形成疏密变化的压力波向周围扩散,该压力波即为弹丸激波,该压力波作用于声音传感器产生电信号,通过获取的各传感器的信号计算激波到达各测量点的时差,采用相应的模型解算出弹着点的坐标信息。激波到达传感器的时延取决于传感器的阵列的布置方法,可以通过优化传感器的布局阵列的布置方法及数学模型来提高弹丸的坐标的定位精度。目前,常用的声定位方法主要有金属杆式声定位法与点阵式声定位法2种。
2.1 金属杆式声坐标靶
金属杆式声坐标靶是利用弹丸激波扫过预先布置的L形金属杆引起的震动,通过分别测量震动波到达L形金属杆两端的时间差来确定弹着点坐标。AVL526型与MSI的ACOUSTIC TARGET TYPE 530坐标靶是其中的佼佼者,AVL526主要性能指标为:靶面尺寸2 m×2 m;定位精度:±2.5mm;记录连发的数据:20条;适用口径:5.56~30 mm弹丸;弹道垂直靶面:偏斜±0.25°以内。MSI的 ACOUSTIC TARGET TYPE 530,如图5所示,主要性能指标为:1 m×1 m,2 m×2 m和6 m×3 m靶面积可调,2 m×2 m靶面内精度±5mm。

图5 530金属杆式坐标靶
2.2 点阵式声学坐标靶
2.2.1 地面布置线阵声学坐标靶
地面点线阵声学坐标靶是在靶面附近布置若干声传感器,其特征为所有的声传感器沿排列为一直线。通过测量弹丸通过靶面时弹丸激波到达各个传感器的时延,利用根据传感器布阵方法建立的数学模型的求解来解算弹着点坐标。
西北核技术研究所研制的ATS-1型声坐标靶,共由7个声传感器组成,其中6个沿水平X轴等间距布成一列,另外一个置于X轴前方,形成丁字形阵,布阵示意图如图6所示[6]。可以测量弹丸速度与弹着点坐标,主要性能指标为:1 m×1 m~12 m×12 m测量靶面;标准误差≦0.5%靶高。
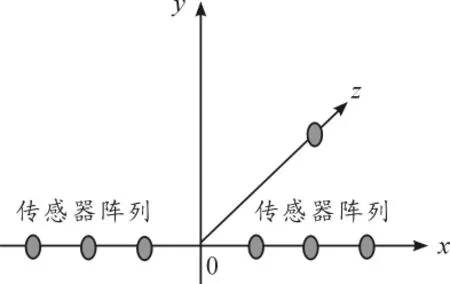
图6 ATS-1型阵列式声靶阵列图
文献[9]设计了一种点阵式声学坐标靶,采用平面7点式布阵方法。对速度为1 000 m/s左右、直径14.5 mm的弹丸,有效射击靶面积为1 m×1 m,无风时测量误差达到±7mm。
文献[10]设计了点阵式声学坐标靶,其布阵模型如图7所示,采用8点式直线布阵模型。对为速度1 000 m/s、直径14.5 mm的弹丸,有效射击靶面积为2 m×2 m,测量误差可达±7mm。
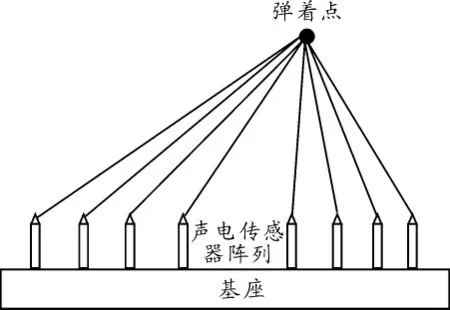
图7 八点直线式声电坐定位原理图
2.2.2 L 形声学坐标靶
文献[11]中设计了一种点阵式声学坐标靶,采用L型布阵模型,传感器布阵方法如图8所示,测量靶面可达10 m×10 m,测量标准误差为±7cm。
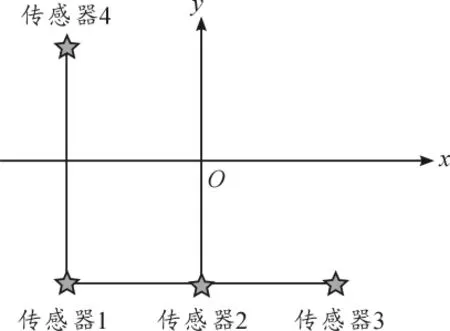
图8 L型点阵式声学坐标靶
2.2.3 地面布置面阵式声坐标靶
在图7所示线阵的基础上,将传感器阵列排列成三角阵、扇形阵等,其排列方法如图9所示。作为其中的佼佼者,英国MSI公司的ACOUSTIC TARGET TYPE 541与文献[12]研制的ZBS10系列,技术性能指标为:动态靶面积为2 m×2 m,测量精度为±5mm;10 m×10 m靶面为±20mm。

图9 地面布置面阵式声坐标靶
2.3 声坐标靶选择问题
当测量靶面大小为1 m×1 m~3 m×3 m时,点阵法测量精度约为3~10 mm,而金属杆式声坐标靶试验标准偏差约为1~2 mm,点阵式声坐标靶的测量精度相对较低。但是,如果利用金属杆法设计10 m×10 m测量靶面的弹着点测量系统,两根金属靶杆需要各需10 m长,这使得靶杆的加工困难,架设也相当不便;同时靶架过于笨重,不便于运输与安装。另外,靶杆易被炮弹击中,系统安全性差,不方便安装和运输。
点阵法的声传感器布阵方式不受靶面限制,可根据需要进行灵活设计,可以以较小体积的布阵建立合适的数学模型来实现大靶面弹着点坐标的测量,系统安全性能高;结构简单,部件组装、拆卸容易,操作使用方便,便于携带运输,特别适合于多功能靶场的测试需求。综上所述,点阵法更适用于大靶面定位系统。
3 大靶面弹着点被动声定位尚需解决的问题
1)大靶面的弹着点被动声定位系统,如果测试系统体积过大,较笨重,除易被弹丸击中而破坏外,还容易产生较大加工误差。因此,小体积的高精度定位方法研究,是未来研究重点内容之一。
2)大靶面测量时,激波到达声传感器的传播路径更长,易受到各种因素的干扰,易使系统产生较大的定位误差。声传感器布阵模型,对应数学模型的优化设计,以增强测量系统的抗干扰能力及解算稳定性,是大靶面被动声定位系统研究需要重点解决的问题之一。
3)激波传播的距离、方向、温度与空气密度的变化,声传感器指向特性的影响,使得传感器获取的激波信号并不相同,加上由调理电路及声传感器的个体差异引起的激波相移,都会对测时造成影响。因此,激波到达声传感器的时延获取方法,也是需要研究的内容之一。
综上所述,未来大靶面立靶密集度自动声定位技术主要解决的问题为精度问题以及由此展开的激波的特性、传感器的特性及稳定性强、精度高的定位模型问题等研究,提高声定位的精度。
4 结束语
在立靶准确度及密集度试验组织实施过程中,立靶靶面尺寸的确定尤为重要。为了保证一组弹药的弹着点全部在立靶上,要求靶面尺寸应足够大,弹着点落在8倍的中间误差范围内的概率几乎为100%,因此立靶高和宽均一般取为中间误差的16倍;对于进行校正射击的火炮,立靶高和宽均为中间误差的8倍。目前,靶场承担从20~155 mm口径的身管武器系统各项试验,在以不脱靶为原则就需准备很大的靶面,一般要求靶面范围2 m×2 m~10 m×10 m。同时,试验还需要满足:靶面应垂直于地面和射向,其偏差不应大于3°,测试精度不大于1/4弹径,安装、架设方便,操作简单。
同时,从前文分析,被动声定位方法与光电式坐标靶相比,进行大靶面测量时具有以下优点:
1)测试方法及测试系统组建简单,更容易组建大靶面立靶密集度测量系统,满足靶场的测试需求;
2)声传感器体积较小,架设于地面,可以通过挖沟进行防护,不易被弹丸击中;
3)不受能见度及杂散光的影响,可用于曳光弹的测试,也可昼夜工作;
4)被动声定位系统体积小、重量轻,易于运输
5)被动声定位系统性能稳定、捕获率高,可靠性高。
因此,在靶场应用中,尤其是大靶面立靶密集度测量中,在对测试精度无严格的限制下,应优先选择地面布置面阵式声坐标靶,安全性能好,测试精度相对线阵较高。
[1] 王泽民,高俊钗,雷志勇,等.CCD交汇测量系统布站方式的精度分析[J].山西电子技术,2006(5):38-40.
[2] 倪晋平,李晋惠,王铁岭.一种新的模拟导弹战斗部破片群单个速度测试系统[J].西安工业学院学报,1999,19(4):274-278.
[3] 倪晋平,侯宏录,孙建,等.基于六天幕靶弹丸弹道末端飞行速度的测试[J].测试技术学报,2007,21(2):117-119.
[4] 赵冬娥,周汉昌.基于大面积激光光幕的弹丸速度测试技术研究[J].测试技术学报,2005,19(4):416 -419.
[5] 郝晓剑,周汉昌,苏尚恩.大面积激光测速靶光学系统的设计与分析[J].测试技术学报,2006,20(1):87-91.
[6] 姜海洋.基于平行光的弹着点坐标测量系统研制[D].南京:南京理工大学,2008.
[7] 蔡逸群.高射频武器弹着点坐标测量系统的研制[D].南京:南京理工大学,2011.
[8] 周承仙,李仰军,武锦辉,等.弹丸速度及弹着点坐标测量系统研究[J].弹道学报,2008,20(1):55 -58.
[9] 李言华.基于弹丸激波的弹着点自动检测系统研制[D].南京:南京理工大学,2011.
[10]姜海卫.弹着点自动检测系统研制[D].南京:南京理工大学,2008.
[11]张飞猛,战延谋,周刚峰,等.声学立靶弹着点测试数学模型与误差分析[J].应用声学,2006,25(4):252 -257.
[12]蒋东东.基于被动声定位的大靶面弹着点坐标测量方法研究[D].南京:南京理工大学,2010.
(责任编辑杨继森)
