轮速信号在提高怠速控制性能过程中的应用
2012-02-20袁观练王国栋
袁观练,王国栋
(上汽通用五菱汽车股份有限公司,广西 柳州 545007)
现有汽车车型,主要为机械式节气门体和电子式节气门体,怠速控制,均由发动机管理系统自动控制。怠速控制受到如下众多因素影响(见表1),需要对这些影响进行修正,以保证怠速稳定性。
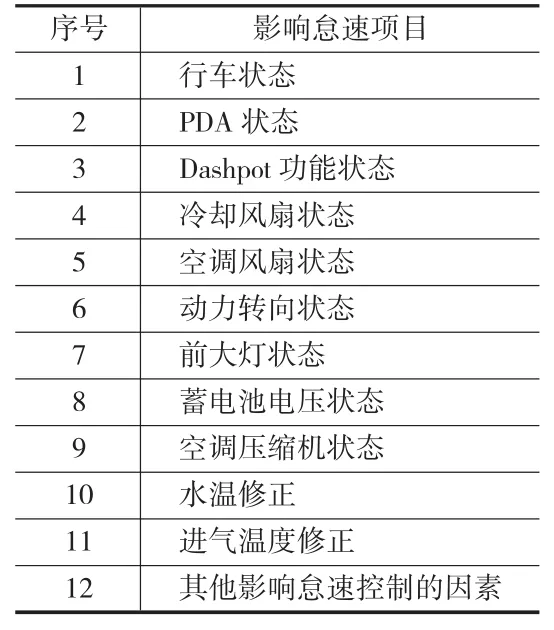
表1 怠速控制部分影响因素列表
1 行车怠速的控制
本文将讨论行车过程中的怠速控制策略和方法,以及在车速传感器信号失效情况下的替代方案,以提高车辆行车怠速控制功能的可靠性。
车辆行驶过程中一旦熄火,将导致真空助力制动器失效,液压式动力转向泵停止工作,车辆的制动和转向都受到严重影响,发生事故概率大为增加,同时也容易造成车辆驾驶员的恐慌,对车辆满意度下降。为此,引入行车怠速控制概念。
经过SGMW CN100车型配B12及C14两款发动机的实际开发验证说明,更小排量的B12发动机,在真空助力制动器、液压式转向助力泵工作时,发动机怠速受到的干扰较大,如果目标怠速设定过低,将存在熄火风险。
如图1所示,A线为发动机转速(r/min),C线为进气量MAF。车辆原地迅速反复踩下/松开制动踏板,因真空助力器作用,对进气歧管进行供气[1],导致进气量加大,而随之发动机转速上升;突然停止踩制动踏板,真空助力器泵气作用停止,而因怠速步进电机不能快速加大开度,导致进气量又急剧下降,发动机转速随之下降,本次测试中发动机转速最低降至481 r/min,已经接近该发动机熄火转速450 r/min。
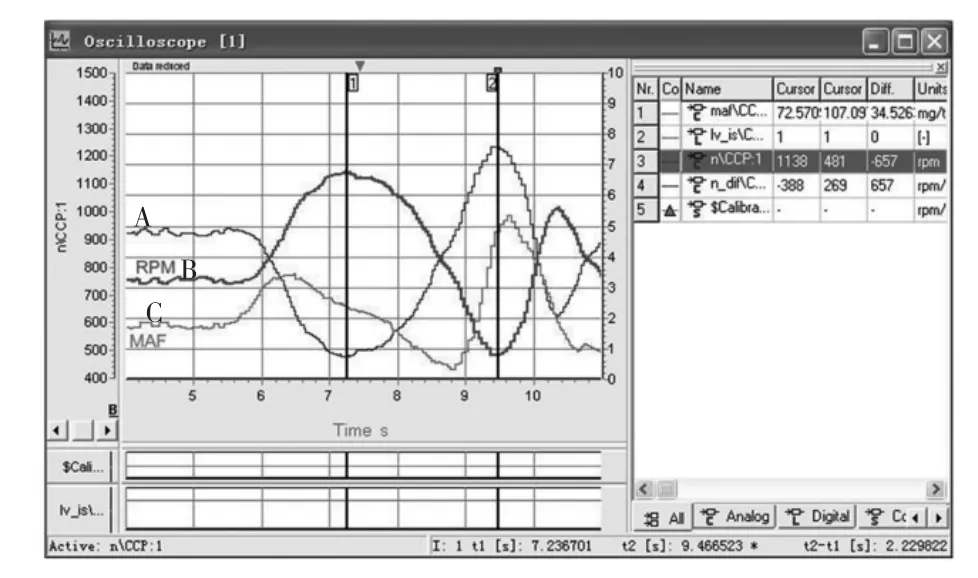
图1 发动机怠速受制动真空助力器影响
因此,在CN100-B12车型引出液压式转向助力泵压力开关信号,以告知发动机管理系统,及时采取相应的扭矩补偿,降低熄火风险。
行车怠速值的设定,还受到直接档(CN100车型为4档)最低稳定车速<20 km/h的限制,因此行车怠速设定范围为750~960 r/min,根据CN100-B12车型实际测试情况,将行车怠速设定为900 r/min,既保证行车无熄火风险,同时满足直接档最低稳定车速限值要求。
2 行车状态的判断
2.1 有车速信号(VS)时的行车状态识别
通常的行车状态识别逻辑,如图2所示。

图2 行车状态识别逻辑
因车速在低于5 km/h的时候,车速信号不稳定[1],所以将车速上升到5 km/h以后,才识别为行车状态。为了避免车辆在行车状态和停车状态反复波动,导致目标怠速变化过于频繁,车速降低至3 km/h后,才判断为停车怠速状态。
2.2 车速信号失效时怠速控制的故障模式
一旦车速信号失效,则发动机控制模块(ECM)就无法判断车辆的行车状态,这时也无法进行行车怠速控制,而只有停车怠速控制一种。同时停车怠速控制自学习值上限、下限受到限制,导致车辆在散差较大及空调压缩机电子扇等外加负载工作时,怠速值偏离正常目标怠速值,极端情况下偏离较大,特别是偏小时,可能出现共振,导致车辆抖动明显及噪声变大。
3 轮速传感器信号临时替代失效的车速信号
3.1 轮速信号作为系统车速信号备用量
目前大部分带OBD车型,均配有右前轮轮速传感器(或者由ABS系统转发右前轮轮速信号),EMS系统用此信号来判别车辆是否行使在坏路上,以避免坏路对失火诊断的判断的影响。此车速信号一般不用于整车车速参考值,但是,在变速器输出的车速信号出现故障时,临时采用该信号作为紧急备用信号,扩大其使用范围,挖掘其在其在行车状态判断中的作用。
ifB_VS_ERR=true and B_VS_RR_ERR=false;
//车速信号故障,而轮速信号正常
than VS=VS_RR;
//车速=轮速
else ifB_VS_ERR=true and B_VS_RR_ERR=true;//车速信号故障,轮速信号也故障
than B_VS_RUN=false;
//为非行车状态(停车状态)
只有在车速信号和轮速信号同时出现故障时,行车判断功能才失效。
3.2 轮速信号作为系统车速信号时部分功能受限
轮速信号,因检测的是右前轮的转速信号,通过车辆转速和车辆滚动半径计算车速,其表征的是该轮子的相关的车速,在车辆转弯、过凹凸路面时,该轮速与实际车速发生偏差,导致该参考量可信性降低[2]。
车速信号,车速传感器一般检测变速器输出轴的转速,通过主减速比和车轮滚动半径计算车速,该车速值更接近实际整车车速值,可信性相对较高;
在CN100车型上,因为变速器后端传动轴两个十字轴万向节、主减速器及差速器的传动间隙,和后悬挂刚度影响,车辆在急加、减速过程,瞬态车速信号误差较大。对该车实际情况而言,轮速信号相对可信性要低于车速信号,因此使用轮速信号临时替代车速信号时,车速信号误差增加,需要对此时的部分功能,进行适当限制,避免带来负面影响。
(1)怠速控制自学习范围的限制。怠速修正,分为短期自学习修正和长期自学习修正。短期修正,针对当前工作状态、负荷变化和转速偏离目标值大小进行补偿修正,此修正相对于是否行车状态不敏感;长期修正,针对车辆状态偏差进行修正,此值形成过程长,变化相对缓慢。
车速信号可信性降低,降低车辆行车怠速判断可信性,此时长期修正可能积累出较大偏差,为了避免行车状态误判,导致长期修正偏离,降低长期怠速修正上下限。
(2)驾驶性能优化功能受限。车速信号可信性降低,导致档位判断可信性降低,而使得相应依赖于各个档位情况下的驾驶性能优化功能,比正常状态效果要差。如Anti-jek(驾驶员急踩油门加速时,ECM控制发动机自动减小扭矩增加速率,以降低车辆抖动可能性)和Dashpot(驾驶员急收油门减速时,ECM控制发动机自动减小扭矩减小速率,以降低车辆抖动可能)功能,都与档位相关联。在此情况下,将Anti-jek和Dashpot功能干预强度,适当减弱,以降低可能的误判导致的驾驶性能恶化。
3.3 故障显示模式调整
在没有引入轮速传感器信号(VS_RR)临时替代失效的车速的逻辑前,原故障灯激活模式为:
ifB_VS_ERR=true;
//车速信号故障
than B_MIL_ON=true;
//故障灯点亮
引入轮速传感器信号(VS_RR)临时替代失效的车速的逻辑后,故障灯激活模式为:
ifB_VS_ERR=true and B_VS_RR_ERR=false;
//车速信号故障,轮速信号无故障
than B_MIL_ON=false;
//为非行车状态(停车状态)
else if B_VS_ERR=true and B_VS_RR_ERR=true;//车速信号故障,轮速信号也故障
than B_MIL_ON=true;
//故障灯点亮
引入轮速传感器信号(VS_RR)临时替代失效的车速的逻辑后,只有车速信号和轮速信号同时出现故障时,才点亮故障灯,轮速信号临时替代车速信号,使得行车怠速控制功能仍然得到保证,尽管出现车速信号故障,在EMS系统中存储车速信号故障码,但不需要点亮故障灯,这样将大大降低故障灯点亮概率,同时也提高了行车安全性和用户满意度。
4 结束语
对CN100-B12车型进行临时改造,使用轮速信号替代车速信号,车速信号可信性降低的程度,对系统的影响细微,在不借助专用标定设备记录的情况下,主观发现不了差异,提高了行车怠速功能可靠性,从而提高了车速信号故障情况下的行车安全性,车速信号故障时被轮速信号临时替代,有着现实的使用价值。
[1]Robert BOSCH有限公司.BOSCH汽车工程手册(第三版)[M].魏春源译,北京:北京理工大学出版社,2009.
[2]Peter Liggesmeyer Dieter Rombach.嵌入式系统软件工程——基础知识、方法和应用[M].北京:电子工业出版社,2009.
