基于改进LMS自适应并行多址干扰消除
2012-02-15解玲娜战勇杰宋振宇
解玲娜,战勇杰,宋振宇
(北京卫星信息工程研究所 北京 100086)
作为扩频通信系统的接入方式,与FDMA和TDMA方式相比,CDMA更适合于通信容量小而要求对多个地球站进行通信的系统(如军事应用、飞机和舰艇通信等)。且在抗干扰、保密性、隐蔽性、灵活性以及抗频率选择性衰落等方面都有许多独特的优点。
由于CDMA系统是码分多址的多址方案,在实际系统中,码间干扰(ISO)、多址干扰(MAI)以及系统中强信号对弱信号的抑制(远近效应)成为CDMA系统必然存在的几类主要干扰。MAI制约着系统的容量,ISO制约着通信的速率。对ISO的抑制可以采用均衡或分集技术。MAI的产生是由于用户之间的相互干扰,而抑制MAI需采用多用户检测(MUD,Multiuser Detection)技术[1-4],其中一种有效的方法是并行干扰消除算法,本文主要介绍一种基于改进LMS自适应并行干扰消除算法。
1 自适应干扰消除算法
在众多的检测器中,把算法性能和复杂度折中考虑,并行干扰消除技术(PIC,Parallel Interference Cancellation)被认为是实用性最强的一种次优多用户检测技术[2]。但是,PIC的性能很容易受到干扰信号估计偏差的影响,也就是说,当并行干扰消除器中待测信号的干扰信号出现较大的估计偏差时,PIC就无法正确地消除干扰,从而产生误判,误码率增大。为减小这种影响,必须找到一种改进方法,进行PIC技术仿真研究以及实现。
图1是自适应并行干扰消除的结构。
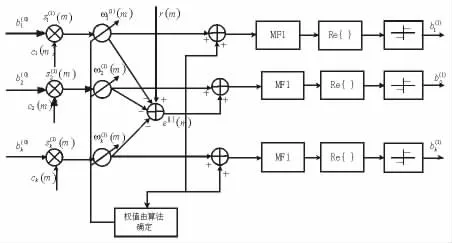
图1 自适应并行干扰消除的结构图Fig.1 Adaptive parallel interference cancellation frame
权值算法主要有3种:最小均方算法 (LMS,Least Mean Square),递归最小二乘算法(RSL,Recursive Least Squares)等[3]。
在LMS基本算法中抽头系数向量设为w,其更新关系式为:

RSL算法的更新关系式为:
初值设置为 w(0)=0,P(0)=δ-1I
2 对LMS算法的改进
传统的LMS算法中可被改进包括误差e迭代,步长μ的调整。变步长LMS算法的核心问题是如何在估计误差和步长之间建立函数关系,在算法初始阶段,抽头全向量为零向量,估计误差很大,此时步长应较大,是算法能很快进入稳态或者即使跟踪系统的变化。当算法收敛以后,步长应较小,则算法稳态均方误差不易受噪声干扰。在变步长常见得是Sigmoid变步长算法及归一化LMS算法(NLMS)。
2.1 SVSLMS算法
SVSLMS算法是根据系统输出误差e来选择步长的改进算法,其变步长 μk是系统输出误差 e的 Sigmoid函数[4-5],即

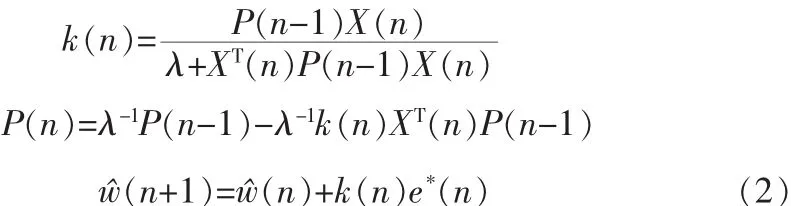
参数α控制函数的形状,β控制函数的取值范围,为统一步长取正值,故α>0,图3是对不同参数值的步长函数曲线图。
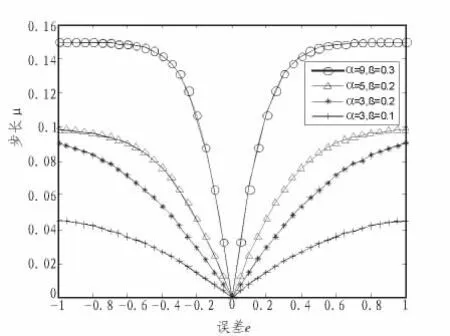
图2 Sigmoid函数步长与参数的关系曲线Fig.2 Sigmoid function step and parameter
由图2分析可知,当检测值初值设为零时,与发送的原始信号误差ek最大,这时初始μk值依据函数计算就会很大,权值w^就可以很快向最佳值趋近,误差ek也随之减小;ek减小,μk也减小,但w^收敛速度放慢;当 ek→0,同样 μk→0,进入稳定收敛状态,此算法能获得较快的收敛速度和较小的稳态误差。该算法明显不足之处是,在ek→0时,Sigmoid函数的斜率是无穷大的,不具有缓慢变化特性,函数变化值太大,这使得SVSLMS算法在自适应稳态阶段任有较大的步长变化,即μk变化很大。
现将步长的调整函数变换为:μk=β (1-exp (-αe2k)),原Sigmoid函数是误差e的一阶变化,调整后,步长函数引进误差e的二阶变化,即使误差变化率也随绝对误差的减小而减小,解决了在ek→0时,Sigmoid函数的斜率是无穷大的,函数变化值太大的问题,对于不同参数的步长函数曲线如图3所示。
当α<0时,步长函数没有下限值,故不可作为步长函数参数的取值范围。由图3可知,当检测值初值设为零时,与发送的原始信号误差ek最大,这时初始μk值依据函数计算就会很大,w^很快向最佳值趋近,误差ek也随之减小;ek减小,μk也减小,但w^收敛速度放慢;当 ek→0,同样 μk→0,进入稳定收敛状态,改进的算法具有了较快的收敛速度和零点附近缓慢变化特性。
图3 不同参数的函数曲线图Fig.3 Function of different parameter
2.2 归一化LMS算法
算法的收敛速度依赖于信号电平,信号电平弱时使收敛变得缓慢,信号过强时使自适应过程不稳定。克服该缺点的一种方法是采用归一化增益步长代替固定步长[6],归一化增益定义式为:

α,β 均为正常数,α 取值 0.000 1,β∈(0,1)即可。β 为防止‖Xk‖22很小时,μk过大,丧失稳定性。将其代入公式中得到:

上式为NLMS算法的迭代公式。
2.3 改进的变步长LMS算法
在保证通信质量前提下,算法复杂度、收敛时间和算法在实际工作中的工作速度是考虑的重点在前述中,LMS两种改进方法各有所长,考虑将两种方法即NLMS的稳态性和SVSLMS快速收敛结合,步长大时采用SVSLMS进行快速收敛,进入跟踪阶段则采用NLMS。对收敛因子的取值进行修正,采用分段式收敛因子确定函数,即将分段式可变系数(PVC:Partition Variable Coefficient)思想应用其中。 则改进算法的步长定义为:

η为门限值,通过仿真验证确定。门限值应该小于步长上限β1,但不能过小,否则失去两种算法互补的优势。根据图4仿真结果,可以初步选定α1=5,β1=0.2,经对改进的SVSLMS收敛性仿真验证,该参数组收敛效果很好。另经对NLMS算法参数多组参数进行仿真,如{(α2,β2)}={(1,0.01),…(0.2,0.001),…(0.02,0.001)},证明(0.2,0.001)该数量级参数具有很好的收敛效果。现取定参数,对门限要求进行仿真验证,门限取在0.01量级,进一步细化可设定为0.02,试验中进行反复仿真验证。
将步长因子代入权值更新函数,再引入到多址干扰消除方法中,即:

目标用户j的信号为

3 仿真及分析
鉴于并行干扰抵消具有误差累积的缺点,引入自适应滤波器算法进行改进,为验证算法的性能,现设计MATLAB仿真实验系统,将上述自适应算法应用到多址干扰消除的具体环境中,将产生的信号扩频调制处理后,通过高斯白噪声信道环境统一信噪比,由于至少要得到10-4量级的误码统计,仿真点数最少要达到10 000,而用户数目越多,仿真时间越久,故将仿真用户数目设定为8,既可以有很好的对比效果,也达到了一定的用户数量,使用截断码的条件下,对各种算法进行仿真验证。首先对算法的收敛性能进行分析,将各用户信号相对幅度设定为1 dB,仿真信号符号数目在20之内即可,得到的仿真结果如图4所示。

图4 收敛性验证Fig.4 Convergence validation
经过仿真运行得到上图结果,可以看出,在收敛速度方面,基本的LMS算法在3 000点才能够收敛,而RSL算法、改进的SVSLMS算法在50点附近收敛,NLMS算法在150点附近收敛,本文的算法的收敛点数在100点,具有较快的收敛速度;稳态性方面,到达收敛阶段后,本文的改进算法、NLMS算法要显著优于SVSLMS算法和RSL算法,稳态误差与基本LMS算法相当。因此在收敛性方面,本文算法已满足快速收敛需求,跟踪信道变化能力变强。
在系统误码率统计情况来看,在上述的信道环境下,设定2种情况,一是不加其他噪声,一是在除白噪声外加入的信号等幅度的单频噪声,增加信道环境复杂度,设定8用户同时传输,基本LMS算法和本文改进的LMS算法的误码统计曲线如图5所示。
通过试验可看到,改进的LMS算法在收敛速度、耗时运算中具有较好的优势,且在多址干扰消除方面有很好的表现。
4 结束语
文中在分析LMS算法的基础上提出一种新的变步长的LMS算法,并通过仿真实验证明了该算法具有良好的性能表现,在应用到多址干扰消除技术上,具有不俗的误码特性,尤其在信道中存在恶意干扰源的情况中,增加的系统通信容量,具有一定的工程应用价值。

图5 本文算法的误码特性比对图Fig.5 BER compare of the arithmetic
[1]杨宇冰.Mc-cdma系统中的用户检测技术性能比较[J].电子科技,2010,23(4):102-104.YANG Yu-bing.Mc-user detection of cdma system technical performance[J].Electronic Science and Technology,2010,23(4):102-104.
[2]许国平,何维,张欣.基于并行干扰删除结构的CDMA下行接收机[J].北京邮电大学学报,2008,31(4):18-20.XU Guo-ping,HE Wei,ZHANG Xin.Structure based on parallel interference cancellation CDMA downlink receiver[J].Beijing University of Posts and Telecommunications, 2008,31(4):18-20.
[3]张小玲,丁坚勇,郑世喜.变阶自适应滤波器及其算法研究[J].现代电子技术,2003(6):39-42.ZHANG Xiao-ling,DING Jian-yong,ZHENG Shi-xi.Change order adaptive filter algorithm[J].Modern Electronic Technology,2003(6):39-42.
[4]Zhang X,Qiu T.Blind multiuser detection based on improved infomax and fastica Advanced Computer Control (ICACC)[C]//International Conference on 2010,2010:476-479.
[5]Choudhry M A S,Zubair M,Qureshi I M.Mud for wcdma using modified pso algorithm wireless communications and signal processing (WCSP)[C]//International Conference on 2010,2010:1-4.
[6]Morhart C,Biebl E.Cooperative multi-user detection and localization for pedestrian protection[C]//German Microwave Conference,2009:1-5.
