模糊控制课程教学中LabVIEW示例的应用与探讨
2012-02-01林剑辉
林剑辉
北京林业大学工学院 北京 100083
1965年,美国数学家Zadeh创立了模糊理论,并将其应用到控制工程中,最近十年来,模糊控制系统成功应用的实例层出不穷,模糊控制已经成为现代智能控制理论中重要的分支[1-3]。我校针对自动化专业学生的就业需求,已在本科生教育中单独开设了模糊控制这一课程。
根据牛津英语词典的解释,“模糊(fuzzy)”一词的含义为“朦胧的,不精确的,不合乎逻辑的,不明白的”。但实际上,模糊系统是一个被精确定义的系统,模糊控制也是一种被精确定义的特殊的非线性控制[4]。对于本科教学而言,字面上的“模糊”与本质上的“精确”是造成学生基本概念混淆的主要原因之一。
笔者通过多年的教学实践发现,要帮助学生深入掌握模糊控制中“模糊”一词的真正含义,除了对模糊控制的基础理论—模糊数学进行深入系统地讲解,让学生加深对理论概念的理解之外,重点在于通过实验环节加深学生对模糊控制的感性认识,并通过实践引导学生的学习兴趣和主观能动性。
仿真模拟在模糊控制的实践教学中具有重要地位。利用各种仿真软件,引导学生自行完成系统分析,参数优化,综合总结等具体教学环节,便于学生通过实验更深入地理解模糊控制的工作原理。在原有教学模式中,通常采用Matlab/Simulink为主要的仿真平台[5],但该平台存在明显的不足:很难与硬件设备连接构成一个完整的控制系统。而NI公司推出的虚拟仪器平台LabVIEW是一种面向仪器测控的图形化编程语言,配合数据采集卡或其他外部设备,可以非常方便地构建一套以计算机为核心的测控系统,在当前测控行业,包括模糊控制系统中都有着较为广泛的应用[6]。因此,笔者在教学过程中,探索性地引入LabVIEW平台为模糊控制课程的仿真实验平台,在教学过程中更好地把理论与实践相结合,以进一步提高学生的动手能力。
笔者以电液位置伺服系统的模糊控制设计为例,探讨模糊控制课程教学中LabVIEW的应用。
1 LabVIEW中的模糊逻辑功能
LabVEIW提供了模糊逻辑功能模块,包括模糊逻辑控制器设计VI(Fuzzy Logic Controller Design VI),模糊控制器加载VI(Load Fuzzy Controller VI),模糊控制器VI(Fuzzy Controller VI)等[7]。
其中模糊逻辑控制器设计VI是实现模糊控制的主要部分,由模糊集合编辑器、模糊规则编辑器和输入输出性能测试三部分组成,其主要功能是提供定义和修改模糊控制中的各参数,包括隶属函数、控制规则、解模糊方法、推理方法及其他相关参数,并可通过性能测试模块对以上参数设定进行仿真测试。系统提供的隶属函数除了传统的三角形、梯形、Z型、S型等隶属函数外,还可由用户自行定义;用户通过该VI可以直观方便地设计各种满足不同要求的模糊逻辑控制器。在设计好模糊控制器后,将其保存于后缀名为.fc格式的数据文件中,以备控制系统调用。
2 电液位置伺服系统的仿真设计
2.1 模糊控制总框图
电液位置伺服系统主要用于解决位置跟随的控制问题,其根本任务是通过液压机构实现被控量对给定量的及时和准确跟踪,并且要求其具有较高的控制精度。电液位置伺服系统的动态特性是衡量系统设计与调试水平的重要指标。整套系统由电信号处理装置和液压元件组成,各元件的动态性能相互影响,相互制约,而且系统本身包含显著的非线性特性,致使其动态性能相当复杂[8,9]。因此,电液位置伺服控制系统的设计及仿真在控制理论教学中具有较为典型的代表性。
首先,针对电液位置伺服控制系统设计其模糊控制系统(如图1所示)。
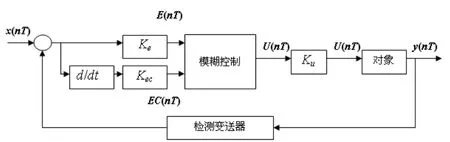
图1 电液位置伺服模糊控制系统框图
其中,模糊控制器是整个设计的核心部分,包括输入、输出变量的模糊化(即模糊子集隶属度函数的设定),模糊规则的设定等。
2.2 输入、输出变量模糊化
本示例采用双输入单输出方式,选择偏差E和偏差变化率EC作为控制器的输入,控制量U为输出。取E,EC的模糊子集为{ENB, ENM, ENS, EZO, EPS, EPM,EPL},它们的论域为{-9, -6, -3, 0, 3, 6, 9},U的模糊子集为{UNB, UNM, UNS, UZO, UPS, UPM, UPL},论域为{-4.5, -3, -1.5, 0, 1.5, 3, 4.5}。选用三角函数为隶属度函数,将输入、输出量模糊化(如图2所示)。
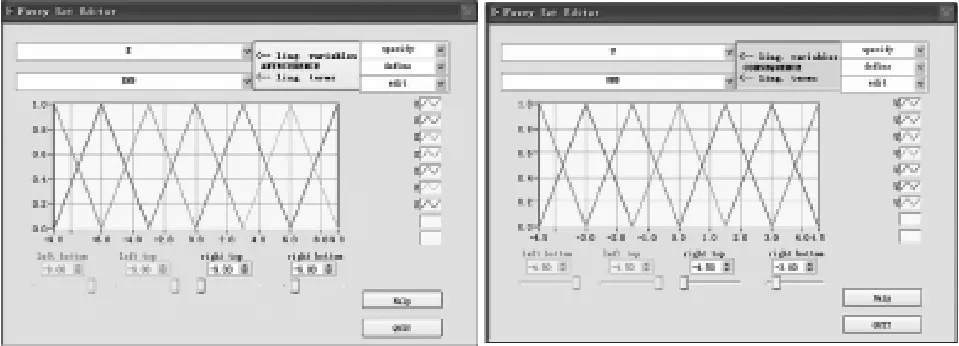
图2 输入、输出变量隶属度设计界面
2.3 模糊控制规则制定
根据电液位置伺服控制系统的控制规律,结合控制专家经验及模糊控制器设计思想,总结得到表1所示的模糊逻辑控制规则表。
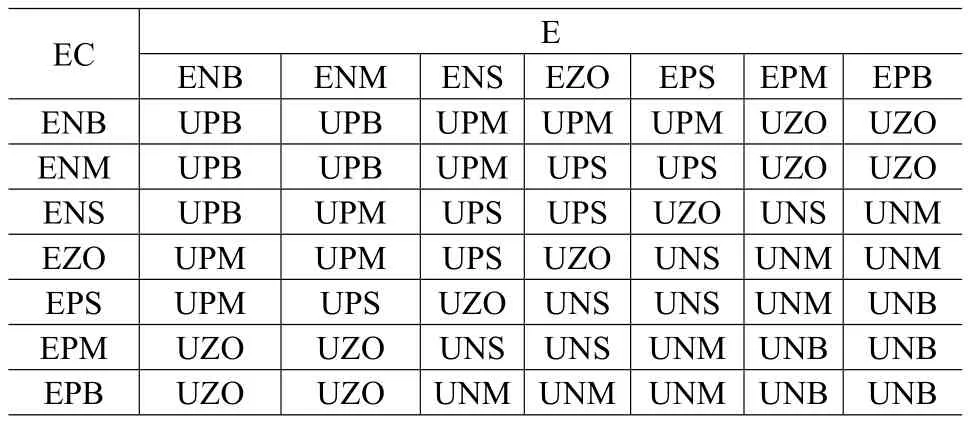
表1 模糊逻辑控制规则表
再将以上控制规则表输入模糊逻辑控制器设计VI中(如图3所示),即形成模糊规则。
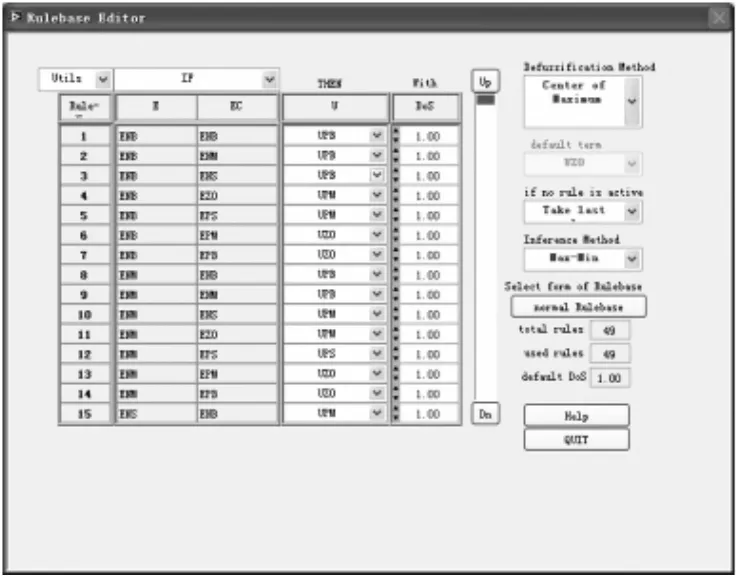
图3 模糊控制规则输入界面
2.4 仿真程序
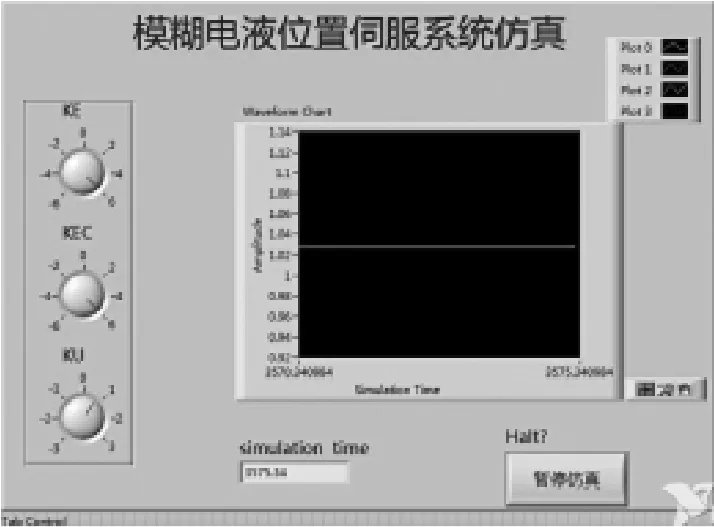
图4 模糊电液位置伺服系统仿真界面
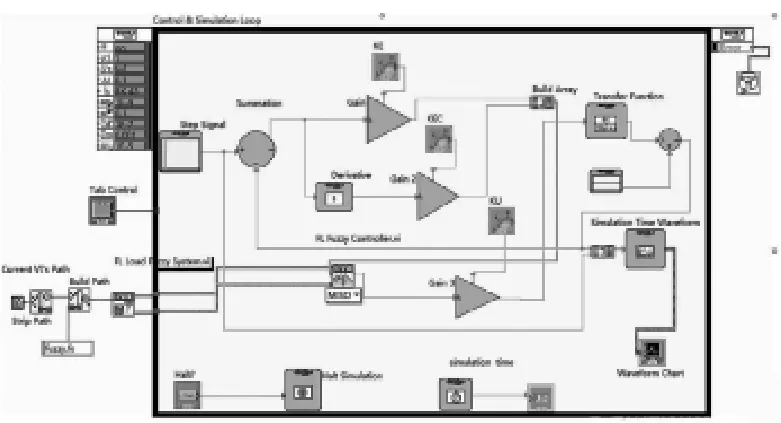
图5 模糊电液位置伺服系统仿真程序图
在设定好输入、输出变量隶属度及模糊控制规则后,存盘生成.fc文件,即可开始建立电液位置伺服控制系统的仿真模拟。该仿真模拟系统包括前面板显示部分(如图4所示)和后面板程序部分(如图5所示)。
3 仿真分析
在“Simulation Parameters”框中设置仿真参数项(由设置参数函数将仿真参数传给仿真程序),在其中可以设计仿真开始、终止时间、仿真最大最小步长和仿真算法等参数。在实验过程中,采用模糊控制与普通闭环控制相比较的教学方法。图6左图为普通闭环电液位置控制系统仿真结果,右图为采用模糊控制后的电液位置伺服系统仿真结果。从两个结果比较可以看出,采用模糊控制策略后,系统响应的超调量变小,响应时间变短,整体性能远远优于采用普通闭环控制的系统。通过结果对比,有利于学生加深模糊控制的感性与理性认识,理解模糊控制核心所在。
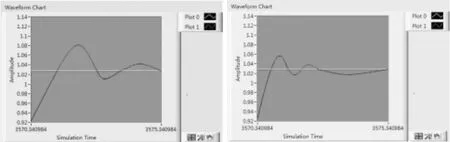
图6 仿真实验结果比较
4 结束语
模糊控制理论发展迅速,它具有便于与其他智能控制方法联合使用的优点,在现代智能控制中占有重要地位。为了提高本科模糊控制教学效果,在实践教学中引入LabVIEW仿真模拟,并与普通闭环控制进行比较,加强学生对模糊控制的感性认识,加深对模糊控制的理论理解,激发学生的创新意识与创新精神,调动学生学习的积极性与主动性,从而了取得良好的教学效果。
[1] 罗永建,郑树彬,吴浩.模糊控制技术在地铁空调控制中的应用[J].上海工程技术大学学报,2011,25(4):324-326.
[2] 黄悦华,徐阳,周星辰.基于变论域模糊控制的无刷双馈风力发电系统空载变网控制[J].电力自动化设备,2012,32(2):99-103.
[3] 张戌社,朱飞.基于模糊控制的焊管切割机控制系统的设计与仿真[J].制造业自动化,2012,34(2):27-28,67.
[4] 王立军,王迎新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003.
[5] 刘新正,贺小玉,冯俊龙.开放平台下调速系统模糊控制的教学实践[J].电气电子教学学报,2011,33(2):45-47.
[6] 卢佩,刘效勇.基于LabVIEW的温度大棚温、湿度解耦模糊控制监测系统设计与实现[J].山东农业大学学报:自然科学版,2012,43(1):124-128.
[7] 陈树学,刘萱.LabVIEW宝典[M].北京:电子工业出版社,2011.
[8] 李梦辉,李虹,刘鹏.基于DSP鲁棒PID控制器的电液位置伺服系统电模拟仿真研究[J].工业控制计算机,2011,24(6):77-79.
[9] 姚建勇,焦宗夏,黄澄.基于动态逆模型的电液位置伺服系统复合控制[J].机械工程学报,2011,47(10):145-151.