基于PLC控制的太阳能追光系统设计
2012-01-29缪德俊戴亦宗
缪德俊,戴亦宗
(扬州职业大学,江苏扬州225009)
随着能源和环境问题的日益严重,太阳能等新能源的开发、利用越来越受到社会的关注,太阳能是一种理想的清洁绿色能源,但转换率不高,造成了太阳能利用的局限性很大。如何提高太阳能的转换率、降低发电系统建造成本是研究太阳能发电系统的两大难题[1]。
本系统利用安装在太阳能电池组件的不同方位光敏传感器检测太阳与电池组件相对位置,检测结果传输给PLC,PLC通过变频器、伺服放大器分别驱动三相低速同步电机和伺服电机动作,实现水平角和俯仰角两轴控制。用户通过GOT可以选择系统工作模式:自动、手动模式。自动模式下,系统首先通过雨水传感器检测天气情况,如是雨天则自动停止在原位不工作;非雨天情况下,系统则进一步自动辨别阴晴天气,非阴天系统自动追踪太阳,以使太阳能电池组件的辐照最大化。手动模式下,用户可以依据需求手动调节太阳能电池组件的水平角和俯仰角。同时系统具有恶劣天气自我保护功能,如强风天气,系统会自动将太阳能电池组件保持水平位置,以减少迎风面。
1 系统工作原理
基于PLC的控制系统以三菱FX-2N型PLC为控制核心,由太阳能电池板、传感器、PLC基本单元FX3u-32MT、PLC模拟量输入模块FX3u-4AD,PLC模拟量输出模块FX3u-4DA、通讯单元FX3u-485-ADP、变频器、雨天传感器、风速传感器、触摸屏组成,系统工作原理见图1。

图1 太阳跟踪与驱动系统
本系统选择光电追踪方式,采用九个信号控制,四个方位角检测信号,一个阴晴天检测信号,两个水平方位极限角,两个俯仰方位极限角。分为东西水平方向和俯仰角控制,水平方向通过变频器驱动三相电机实现无极调速,水平方向最大限位角度为180°,俯仰角度最大90°,电机和机械装置之间的配合采用涡轮蜗杆传动,传动比30∶1,这样电机转30圈,装置才转1圈,保证了系统的精度。俯仰角度的控制是通过伺服电机来调整,同样要求低速,采用同样的方法。由于伺服电机本身非常精确,在传动机构上采用同步带轮,使用同步带轮可以减少在传动过程中的误差。晴天时用四个方位角传感器跟踪,若太阳光线没有垂直于太阳能板,此时传感器输出信号输入到PLC,经处理后将驱动电机,调整太阳能板的位置,使其对准太阳,实现跟踪;阴雨天时太阳能板不运行自动回原点;当大风时,太阳能板将自动平放,以减少风的阻力,防止大风对装置的损坏[3]。
2 系统组成
2.1 机械结构
本系统机械结构主要由3部分组成,见图2。
(1)底座
用来固定水平方向三相同步电机和减速器(涡轮蜗杆),并支撑其上部结构。减速器的输出轴(涡轮轴)垂直放置在底座的正中心,输入轴(蜗杆轴)和三相同步电机用联轴器连接。在底座上固定3根等长方形支架,支撑直径360mm的中间圆盘,用螺栓固定,间接和底座固定。
(2)圆盘
中间圆盘上开直径40mm的孔,车一个放置平面轴承的槽。通过电动机的带动,带动其上结构绕轴旋转。上层圆盘上车一个放置平面轴承的槽,焊一个带盲孔的圆柱体,轴线和圆盘轴线重合,盲孔和底座的减速器用销连接。上层圆盘上表面通过焊接固定2个L形带圆孔的等长板材和n形带长孔螺母的板材。2块L形板材相对安放在过圆心的上层圆盘上,保证L支架平行,2圆孔的轴线过圆盘的圆心。将减速器和伺服电机用联轴器安装固定在L形板材上,板材上打孔,通过螺栓连接将电机和减速器固定在n形板上,n形板焊在过上层圆盘圆心且和轴垂直的位置上。减速器的输出轴用销和同步带轮固定,同步带轮和轴上带轮平行。

图2 系统机械结构
(3)太阳能电池支架
用角钢参照电池板尺寸钢焊接支架,同时用型材焊一个外框在与轴连接的部分,本系统考虑拆装方便前提下,采用抱箍固定在轴上。
2.2 光电传感器
太阳位置光电传感器是光电追踪方式中很重要的一个部件,其探测可靠性决定了系统的追踪准确性,继而影响系统的发电效率。它对于整个系统的重要性不可忽视[4]。
本系统设计传感器如图3所示,R1、R2为1KΩ电阻,R5为10KΩ电阻,R4为可调电阻,阻值为0-10KΩ,R5为1K电阻,三极管8050的集电极接中间继电器的线圈。当有光照射达到光敏电阻,阻值发生减小,一旦比可调电阻预设的阻值小,经过放大器让三级管导通,中间继电器的线圈通电,常开触头吸合,以此来给PLC信号,表示此方向已经对准太阳。同时该传感器可根据当地每月平均太阳光照强度,调节可调电阻的阻值,达到最佳的控制效果。
光电传感器安放的位置和方法直接影响传感器的检测精度,因为光敏电阻是点元件,所以接受光能的范围比较广,如果直接暴露在阳光下会降低整个太阳追踪系统的精度,所以本文设计采用在光敏电阻外部安装遮光套,根据安装不同地方作具体的调整。四个传感器分别安装于太阳能电池板的四周,还有一个阴晴天检测传感器安装于支架上,五个传感器比较电路集成在一块印制电路板上,安装于太阳能电池板的后面,并作避雨处理。

图3 光电传感器原理
2.3 雨水传感器
雨水传感器采用两根导线交叉式按布在电路板上靠的很近但不导通,连接到PLC端子是X0,当雨水滴落到传感器上时,两根导线导通,此时向PLC传送雨天信号,PLC传送出动作信号,执行回原点程序,保护装置。
3 程序设计
3.1 控制原理
本系统根据春夏秋冬四季太阳入射光强度的不同,调节可调电阻,根据不同的电压变化在一定的范围内将模拟量转化为数字量给PLC执行器,PLC根据一定的规则,控制系统运行,控制规则如表1。
3.2 程序设计
主程序要能是实现装置在水平方向上电机转动,当触碰到西限位开关,三相电机能够停止转动,然后转向原来最东边的初始位置,转动到最东边时触碰到东限位角时,整个装置进入等待状态,等待第二天太阳再次升起的时候再次转动;太阳能电池板俯仰角在随太阳高度角变化而变化的时候,装置需要限制太阳电池板的运动,俯仰角最大不能超过90°,最小不能小于0°。
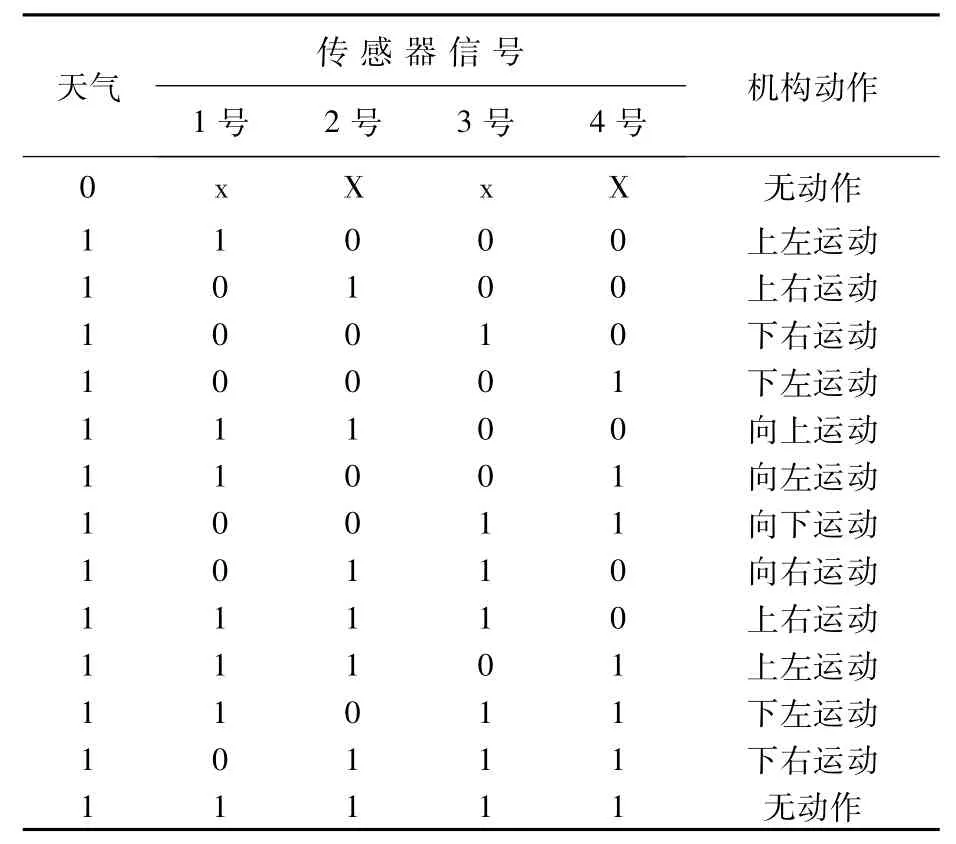
表1 控制规则
4 结语
本设计以PLC为核心控制器,采用的光电跟踪方式,可根据天气情况自行选择是否工作,在提高太阳利用率的同时,系统工作更稳定。实验表明,其控制效果良好,提高了控制精度,能在复杂的天气环境下实时追踪太阳,提高太阳能转化成电能的效率。
[1]刘金城,任松林.主动式太阳跟踪及驱动系统研究与设计[D].重庆:重庆大学,2008.
[2]万里瑞.太阳能电池自动跟踪系统的设计[J].机械工程与自动化,2008(3):156-158.
[3]于贺军.全自动太阳跟踪器软件的设计和研究[J].气象水文海洋仪器,2001(2):7-11.
[4]李加升.基于光敏器件的光控电路分析[J].中国科技信息,2005(14):8-10.
