数据链时延对融合精度影响的仿真分析
2012-01-29关成斌王国宏李世忠
关成斌,王国宏,李世忠,王 娜,2
(1.海军航空工程学院 信息融合技术研究所,山东 烟台 264001;2.中国人民解放军92941部队93分队,辽宁 葫芦岛 125001)
数据链的主要功能是使一定区域内各种指挥控制系统和操作平台的计算机系统组成数据传输、交换和信息处理网络,为指挥人员和实际操作人员提供有关数据和完整的态势图,目前已得到广泛应用.例如,美国的Link 16、Link 14、Link 4A,以色列的ACR-740等数据链已实现了机载、陆基和舰载数据系统之间信息的交换.[1-3]通过机载雷达系统与数据链系统的数据融合,可以提高对目标的探测和跟踪性能[4-6];但是,由于数据链主要通过一套标准的通信设备将数据信息传递给机载雷达系统,而通信设备的时延成为雷达和数据链信息融合不可避免的问题,如果不能对数据链时延进行及时修正,则融合精度会受到很大影响.这个问题引起了很多研究者的兴趣:WU等[7]对JTIDS网络时间同步问题进行了性能分析和仿真,结果表明数据链时延对态势精度具有明显的影响;LIN等[8]探讨了数据链时延对异步多传感器多目标误差估计问题的影响;荆晓鹏[9]较系统地研究了数据链与被动雷达信息融合的方法,认为数据链的时延将明显降低融合精度;任培[10]、仝海波[11]等从战术层面分析了数据链时延的影响;肖双爱等[12]研究了数据链中航迹校准算法,认为通过时延的补偿可以有效减小航迹的正确关联概率.由此可见,数据链时延是无法避免的,且会对目标航迹的精度产生明显影响,目前虽有很多学者已经致力于对该问题的改善,但是针对航空领域中数据链航迹与机载主动雷达航迹的融合问题还研究甚少.为此,本文根据数据链时延对融合精度的影响,对不同大小时延以及有无时延修正的情况进行了仿真分析.
1 雷达航迹和数据链航迹关联融合算法
1.1 航迹关联
设k时刻雷达和数据链的状态向量及其方差分别用其方差分别用表示,则判断数据链航迹和雷达航迹是否相关就是对下列两个对立假设进行检验:

雷达和数据链对目标i和j的状态估计之差为



定义检验统计量

此时检验统计量为

在H0假设中,状态估计误差服从高斯分布,因此λij服从自由度为nX的χ2分布,其中nX为状态向量的维数.如果λij低于使用χ2分布获得的某一门限,即

则接受H0,否则接受假设H1,其中阈值满足

式中α是检验的显著水平,通常取0.05,0.01,0.1等.
1.2 航迹融合
在雷达航迹和数据链航迹关联之后可作以下融合:

2 时延修正算法
假定数据链存在Δt1~Δt2的未知固定时延,且数据链时延在区间[Δt1,Δt2]上服从均匀分布,雷达航迹与有固定时延的数据链航迹进行融合,数据链固定时延的存在势必影响融合的精度,因此考虑对数据链时延进行修正.由于固定时延未知,故采用取均值的方法对数据链固定时延进行修正,即

3 仿真分析
对一个两机编队飞行的场景进行仿真分析.假设飞机1得到目标的雷达航迹,飞机2得到目标的数据链航迹,以飞机1为融合中心,将飞机2得到的数据链航迹传送至飞机1,对雷达航迹和数据链航迹进行融合.飞机和目标的初速度均为400m·s-1;雷达测距精度100m,测角精度0.25°,数据率1Hz;数据链x,y,z轴的测量精度均为300m,数据率5Hz,数据链存在50~1 000ms的固定时延.图1,2分别给出飞机和目标均作匀加速直线运动及“Z”字形运动时,各种数据链时延(包括有无时延修正)情况下的位置均方根误差(100次Monte Carlo仿真取平均的结果).
表1,2分别给出了飞机和目标均作匀加速直线运动和“Z”字形运动且滤波达到稳定时,各种数据链时延大小和有无时延修正算法情况下的目标距离、方位、俯仰以及位置精度比较.
由仿真结果可见:①当数据链时延较小时,有数据链时延修正算法与无时延修正算法的性能相比,并没有明显的提高.可能的原因是由于量测噪声的影响,较小的数据链时延对融合精度影响不大;另外,受修正算法的影响,当固定时延较小时,修正算法对固定时延修正过度,从而影响修正效果.②数据链固定时延在500ms以上时,有数据链时延修正算法的性能明显优于无时延修正算法的性能.③随着数据链时延的增大,修正的效果越来越明显.

图1 飞机和目标均作匀加速直线运动时的位置均方根误差Fig.1 RMS errors in positionwhen the planes and target are all moving in uniform acceleration by rectilinear paths

图2 飞机和目标均作“Z”字形运动时的位置均方根误差Fig.2 RMS errors in position when the plane and target are both moving by“Z”paths

表1 飞机和目标均作匀加速直线运动情况下有无时延的跟踪精度比较Tab.1 Comparison of tracking precision between with and without time-delay modification when the plane and target are both moving in uniform acceleration by rectilinear paths
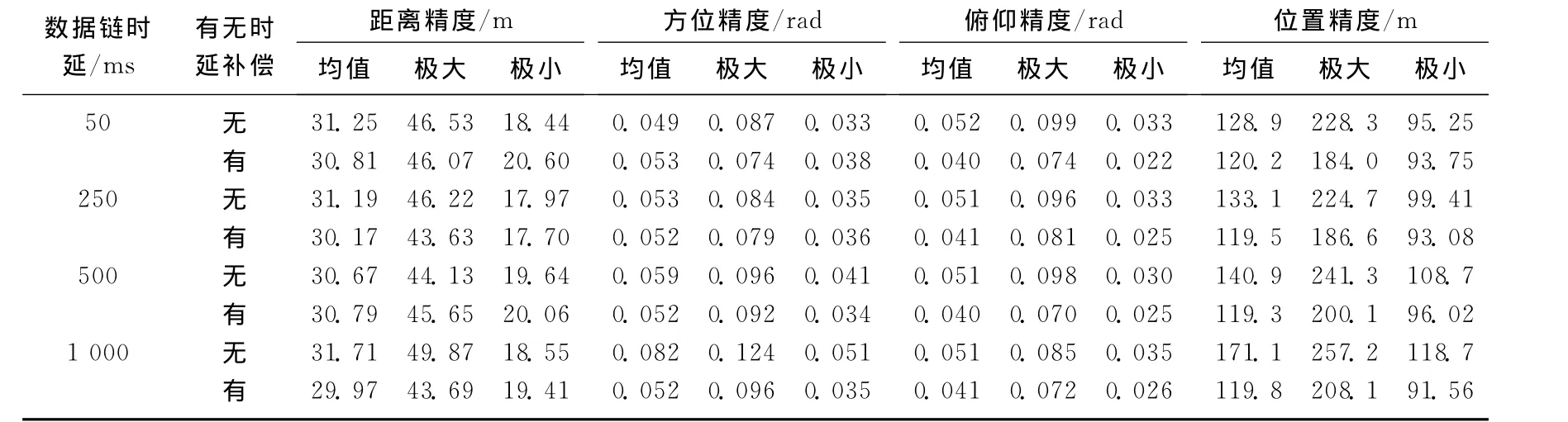
表2 飞机和目标均作“Z”字形运动情况下有无时延的精度比较Tab.2 Comparison of tracking precision between with and without time-delay modification when the plane and target are both moving by“Z”paths
[1]TRANI P,ANTOINE P.MPM for radar,data link and ECM systems[C]//Vacuum Electronics Conference.Kitakyushu,Japan:IEEE,IVEC,2007:403-404.
[2]SCHMITT M.Coordinating the global information grid initiative with the NG9-1-1initiative[C]//IEEE Conference on Technologies for Homeland Security.Waltham MA:IEEE,2008,4(8):415-420.
[3]陈颖,成晓岚.数据链在外军装备中的应用及关键技术 [J].航空电子技术,2004,35(4):43-48.
[4]黄鹤.机载多传感器数据融合的数据链应用技术 [J].电讯技术,2004(4):103-106.
[5]RONG Lang,WANGwei-chang,LOGAN M,et al.Multi platform multi sensor fusion with adaptive-rate data communication[J].IEEE Trans Aerosp Electron Syst,1997,33(1):274-281.
[6]GONZALES D,HOLLYWOOD J,KINGSTON G.Network-centric operations case study:air-to-air combat with and without Link 16[R].Santa Monica,CA,USA:RAND National Defense Res Ins ti Santa Monica,2005.
[7]WU Nan,WANG Hua,KUANG Jing-ming.Performance analysis and simulation of JTIDS network time synchronization[C]//Proceedings of the 2005IEEE International,Frequency Control symposium and Exposition.Vancouver,BC,Canada:IEEE,2005:836-839.
[8]LIN X,BAR-SHALOM Y,KIRUBARAJAN T.Multi sensor multitarget bias estimation for general asynchronous sensors[J].IEEE Trans Aerosp Electron Syst,2005,41(3):899-921.
[9]荆晓鹏.数据链与被动雷达信息融合方法研究 [D].西安:西北工业大学,2005.
[10]任培,王文政,周经伦,等.数据链时延对超视距空战影响的分析 [J].计算机工程,2009,35(14):249-251.
[11]仝海波,梁俊,吕娜.战术数据链时延特性的仿真分析 [J].电光与控制,2009,16(8):53-55,64.
[12]肖双爱,李钦富,王忠强.数据链中航迹校准算法研究 [J].中国电子科学研究院学报,2009,4(4):422-426.
