1.3厘米接收机背架调整系统设计*
2012-01-25马军刘奇曹亮李健闫浩
马军,刘奇,曹亮,李健,闫浩
(1.中国科学院新疆天文台,新疆 乌鲁木齐 830011;2.中国科学院射电天文重点实验室,江苏 南京 210008)
接收机的安装要求其馈源的相位中心尽可能接近天线主反射面焦点[1],使反射面反射的电波同相汇聚,若馈源的相位中心偏离反射面的焦点,天线的有效面积要下降;馈源与天线焦点的匹配精度应高于1/20λ[2],精度不高造成效率损失,从而降低接收机接收的信号质量。然而,由于1.3 cm双极化制冷接收机工作频率高,波长仅为1.3 cm,为保证接收机馈源的移动精度,接收机背架调整系统的设计显得尤为重要。由于南山25 m射电望远镜高频仓内已安装有接收机升馈系统,馈源可升至天线焦点的大致位置,满足了对馈源的一维控制;背架调整系统的设计应满足馈源在水平和垂直方向上精确移动,从而实现对接收机馈源的三维精确控制。
1 背架调整系统组成
1.3cm双极化制冷接收机背架调整系统由背架、滚珠丝杠、步进电机、减速器、驱动软件组成。图1为运用三维设计软件设计的背架调整系统示意图,通过控制软件实现计算机与电机的通信,步进电机分别在垂直和水平方向上驱动滚珠丝杠,进而移动背架导轨,实现了终端对接收机馈源的精确控制。
2 滚珠丝杠及电机选型设计
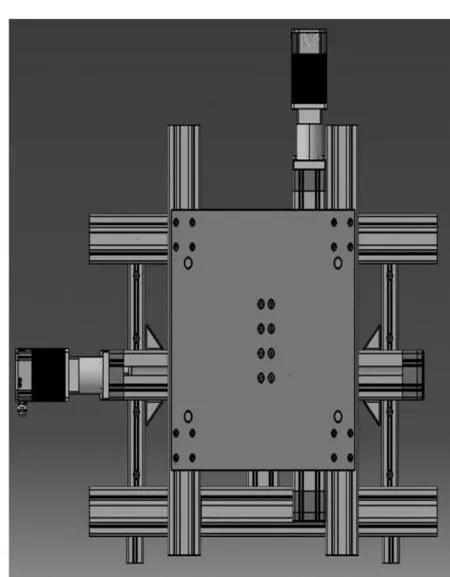
图1 背架调整系统示意图Fig.1 Sketch of the adjusting system of the back frame
2.1 滚珠丝杠选型分析
通过分析滚珠丝杠的运行环境,可计算出滚珠丝杠能承受的最大轴向负载:

式中,Fmax为滚珠丝杠的轴向负载;u为摩擦系数;m为接收机与工作台的最大近似质量;g为重力加速度。
基于上述力学分析选择Item公司的0.0.414.51型滚珠丝杠,基本参数见表1,力学性能曲线如图2。
考虑到工程实际,接收机的微调要求位移精确,速度慢;由于滚珠丝杠螺距为5 mm,即滚珠丝杠的转速低于60 rev/min,从滚珠丝杠的力学性能曲线可以看出,在转速低于200 rev/min时,滚珠丝杠轴向可承受负载为2000 N,且工作寿命可达到10000 h。(1)式为计算的最大轴向负载,很明显,所选的滚珠丝杠满足力学性能要求。
2.2 驱动电机选型分析
滚珠丝杠的确定后,驱动电机的选型设计也很重要。驱动电机的力学分析见(2)~(4)式,式中P为滚珠丝杠螺距;S为安全系数;n为减速器的级数。
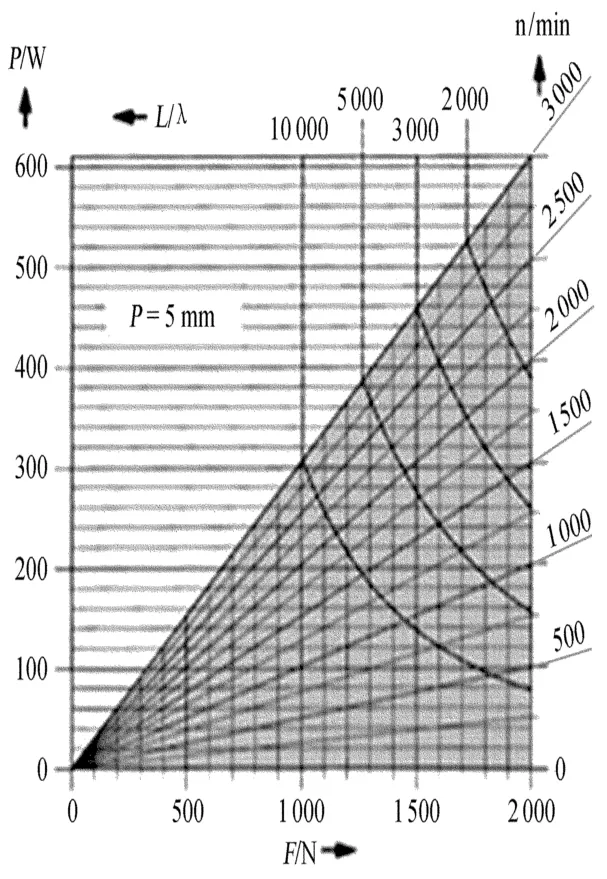
图2 滚珠丝杠的力学性能曲线Fig.2 Mechanical property of the ball screw

表1 滚珠丝杠的性能参数Table 1 Performance parameters of the ball screw


通过力学分析,选择Nanotec公司的PD6-N89系列步进电机。PD6-N89系列步进电机步进分辨率高,通过计算,步进电机精度达到0.001 mm,满足精度要求。从(4)式可以看出,力学要求电机的最大扭矩为1.314 N·m,图3为所选电机的力学性能曲线,从图中可以看出所选电机完全满足设计要求。
3 系统驱动模块设计
图4为电机驱动模块测试连接图,电机输出线缆分别为电源线和数据线,供电电源为24 V,每个电源并联一个10000 uF的电容,起到很好的滤波作用。电机的数据输出接口为RS485,这就要求实现RS485到RS232的转换,以便实现电机与计算机进行通信,为此设计了RS485-RS232转换器。
通过实际测试,实现了计算机与步进电机的串口通信;并设计了电机驱动模块,包括电源、驱动电机、电容、开关、数据I/O接口和电源接口,实物图如图5。

图5 电机驱动模块实物图Fig.5 The diagram of the motor-driving module
4 背架调整系统控制软件设计
4.1 控制软件需求分析
(1)功能要求:在水平方向和垂直方向上实现步进电机的控制,从而满足对接收机的精确控制;
(2)能运行于使用Windows2000或WindowsXP操作平台的各种微型计算机系统;
(3)系统的容错性:能够对驱动软件运行过程中出现的各种异常情况给予提示或加入相应的容错处理;
(4)用户界面简单大方,适合观测人员操作;
(5)正常使用时不应出错,若运行时遇到不可恢复的系统错误,必须保证数据库完好无损。
4.2 控制软件设计
背架调整控制软件在Visual basic 6.0环境下设计,通过使用MSComm(Microsoft Communications Control)ActiveX控件可轻松实现串口数据的交换[3],实现与步进电机串口通信。MSComm是微软公司提供的Windows下串行通信编程的ActiveX控件,它既可以用来提供简单的串行端口通信功能,也可以用来创建功能完备、事件驱动的高级通信工具[4]。为解决串口通信延迟问题,防止通信过程中数据丢失,运用Timer ActiveX控件,通过Timer控件可实现每隔50 ms发送一条指令,从而解决了串口通信过程中的指令丢失。
控制软件界面如图6,首先需要选择通信端口和电机移动速度;输入移动距离,点击“水平方向”或“垂直方向”按钮即可实现接收机的精确移动,运行进度条反馈接收机馈源的运行进度;“相对坐标”和“绝对坐标”反馈馈源的移动位置,并设置接收机馈源的最大移动范围,以提高系统的安全系数。

图6 驱动软件界面Fig.6 The interface of the control software
5 小结
基于1.3 cm双极化制冷接收机的安装及观测需求,设计研制了其背架调整系统,并编写背架调整系统控制软件,满足了实际的工程需要,为射电天文望远镜高频接收机的安装提供支持和建议。
[1]Imbriale W A.深空网大天线技术 [M].李海涛,译.北京:清华大学出版社,2006.
[2]王绶舘,吴盛殷,崔振兴,等.射电天文方法 [M].北京:科学出版社,1988:67.
[3]范逸文,陈立元.Visual Basic与RS 232串行通信控制 [M].北京:清华大学出版社,2002.
[4]喻维钢.用VB6.0实现PC机对多台流量计远程数据采集与监控 [J].仪器仪表标准化与计量,2002(6):5-8.Yu Weigang.Collecting and controlling the long-distance data of flowerets by using personal computer base on VB6.0 [J].Instrument Standardization and Metrology,2002(6):5-8.
