浅析深水铺管船功率管理系统
2012-01-22
(江苏熔盛重工有限公司,江苏 南通 226532)
“海洋石油201”是深水铺管起重船,即DPV,采用DP3动力定位系统,全船采用电力推进。该船入ABS和CCS双重船级,在起重作业状态满足DP3(ABS:DPS-3,CCS:DP-3)要求,在铺管作业状态满足DP2(ABS:DPS-2,CCS:DP-2)要求。ABS规范(2005)和CCS规范(2006)都要求具有DP2和DP3附加船级符号的船,必须设置功率管理系统(PMS)。具有动力定位附加船级DP2和DP3的船舶对PMS的要求比一般船舶高得多[1]。
对动力定位船舶而言,保持其船位和艏向是其正常作业的基本要求。目前,大部分动力定位船舶采用全电力推进。也有一部分动力定位船舶的主推进装置采用柴油机推进,但其方位推进器仍采用电力推进。无论如何,保持动力定位船舶的船位和艏向的前提是电站可靠地连续供电。“海洋石油201”项目采用全电力推进,PMS应与此适应。
1 船级社对PMS的相关要求
1.1 CCS的要求
1)对于具有DP-2 和DP-3 附加标志的船舶,应设置一个自动的功率管理系统,此系统应使发电机随负荷的变动而启动和停止。当没有足够的功率启动大功率的负载时,应阻止大功率设备的启动,并按要求启动备用发电机,然后再启动所需要的负载。
2)当总的电力负载超过运转中发动机总容量的预定百分比时应发出报警,该报警的设定值应在运转容量的50%至100%之间可调,并应按运行发电机的数量和任一台发电机失灵的影响加以确定。
3)对于电力驱动的推力器系统,应采取措施,在负载达到②规定的报警值之前,使未运行的发电机自动启动、同步和负载分配。
4)因一台或几台发电机的停止而引起的突然超负荷不应造成电源的全部中断,在启动一台新的发电机并使其开始发电的过程中应减小螺距或/和降低转速以减小推力器的负载。如动力定位系统的计算机系统能完成这一功能,则应与功率管理系统相协调。
5)功率管理系统的故障应不引起在网发电机的替换,且应在动力定位控制站报警。
6)断开功率管理系统后,配电板应能手动操作。
7)应对功率管理系统进行FMEA分析。
1.2 ABS的要求
1)对具有DPS-2和DPS-3附加船级符号的船舶,必须设有功率管理系统(PMS),以确保基本运行可获得足够的功率,并阻止发电机容量不足时起动负载。应至少设有2个功率管理系统,以使系统在任一个功率管理系统失效时继续工作。应考虑采用诸如卸去非基本负荷或使控制系统临时减少推力,以确保功率的有效性。
2)每一功率管理系统应由UPS供电,且做到一个功率管理系统失电不会导致另一个功率管理系统失电。
3)对DPS-3船级符号,功率管理系统的布置和设置要做到任何一个单个故障,包括一舱失火或进水,都不会造成功率管理系统不能运行。
CCS和ABS的要求在表述上有所不同,但基本精神是一致的。两者对冗余性都有要求,在功能上的共同要求是确保供电的连续性和可靠性。这一要求看上去和普通船舶相同,但由于动力定位对供电连续性和可靠性的要求更高,并由于动力定位船舶电站的复杂性,要实现这一要求也复杂得多。
电站的可靠性再高,失电(blackout)的可能性总是存在的。两个船级社的规范都未提失电后自动启动备用发电机,那是因为在规范的电气部分和自动化部分已有明确要求,动力定位船舶也应满足这些要求。由于本船有6 600 V和400 V两级电网,因此失电处理要更复杂些。
2 PMS的功能
本船的PMS装置集成入VMS系统,成为其一部分。它除具有一般船舶的PMS装置具有的功能,如自动同步、自动负荷分配、发电机解列管理、备用机组选择等外,还具有确保供电的连续性和可靠性的功能。
1)在所有时候都确保足够的维持船位用推进器所需的功率。
2)监测每一台柴油发电机组,并响应系统监测到的参数报警情况,起动或停止特定的发电机组。
3)控制并联运行的发电机组的负荷分配。
4)监测电网的负荷情况,按使电驱动设备能获得足够的电功率的要求启动和停止柴油发电机组。要实现这一点,也要求不允许大量不必要的负荷同时接入电网。
5)过载时快速降低推进器速度。
6)整个系统失电时发电系统重启动。
7)人机交互界面。
PMS运行时,所需参数的采样周期为100 ms。
2.1 电力系统的配置
“海洋石油201”电力系统配置6台主发电机,电网总容量达34 560 kW,确保在各种工况下均能至少有1台备用发电机;发电机组额定功率之和均大于各种工况下实际运行负载的功率之和,见图1。
PMS能根据汇流排故障和设备故障等不同的情况,采取切除故障的汇流排或者保证与故障设备连接的汇流排供电的连续的措施,从而为船舶提供可靠的电源。
在1、2、3号高压配电板;1、2、3号低压辅配电板;应急配电板、1、2号铺管配电板分别集成了一个信号采集箱,监测配电板各断路器状态、遥控、电流、频率等,并且能控制部分断路器,监控报警点多达2 500多个。这些信号采集箱通过冗余双路网络即时通讯。信号采集箱构成了PMS与整个船舶电站的联系接口,在驾驶室还设置有操作台,用来显示以及遥控PMS。
2.2 按负载功率需求启动和停止发电机组
正常情况下,确保足够的维持船位用推进器所需的功率容易实现。当电网储备功率不足时启动备用发电机组投入运行。为保证船舶经济性,当储备功率过剩时解列多余机组。
与一般船舶的PMS相比,表1中的设定值有如下特点。
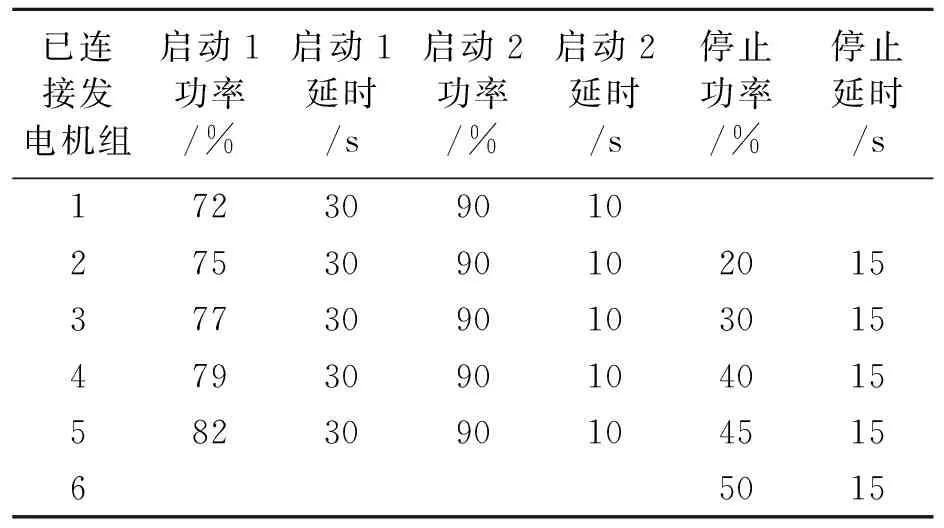
表1 PMS对启动/停止发电机组的设定值(此设定值可调)
1)启动设定值较低,停止设定值更是低得多。这是因为动力定位船舶对供电可靠性要求更高,而经济性的考虑比一般船舶更显得次要。
2)运行发电机数量不同,启动和停止设定值也有变化,而且启动值有两级。因为本船的主要电负荷是电力推进,要求电站有较多的功率储备,按运行发电机的数量确定启动和停止设定值是合理的,且兼顾了经济性。
为防止负载频繁变化时发电机频繁启动停止,可为这样的负载设定功率储备。
如运行时汇流排或汇流排分段之间的断路器断开,则PMS可将电站作为几个独立电站处理。
2.3 重载问询
根据发电机容量,本船需要重载问询的负载有MSB1A上的1号主推进器;MSB1B上的主起重机电源1、6号推进器、7号推进器;MSB2A上的2号主推进器、主起重机电源2;MSB2B上的5号推进器;MSB3A上的7号推进器、3号推进器;MSB3B上的4号推进器。当这类大功率负载需要启动时,先向PMS提出所需的功率请求,PMS将检测可用功率是否足够启动。如果不够,负载不会启动,PMS将给出一个启动备用发电机组的命令。当启动备用发电机组后的电网容量足够和其它启动条件均具备的情况下,负载启动被允许。如在规定的时间内仍未达到足够的启动功率,负载启动命令失效。
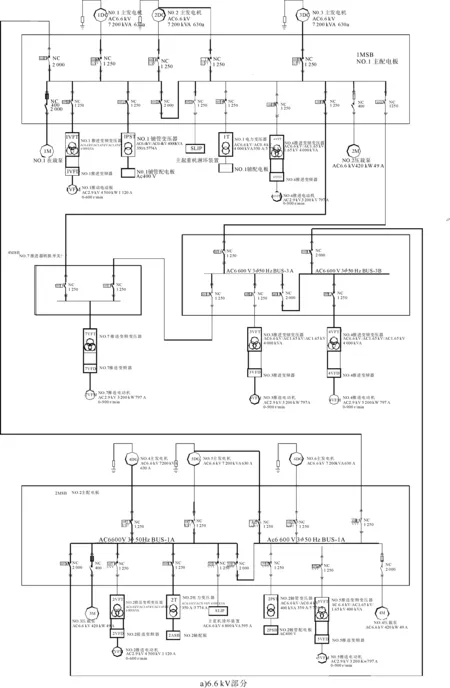

图1 “海洋石油201”项目的电力系统
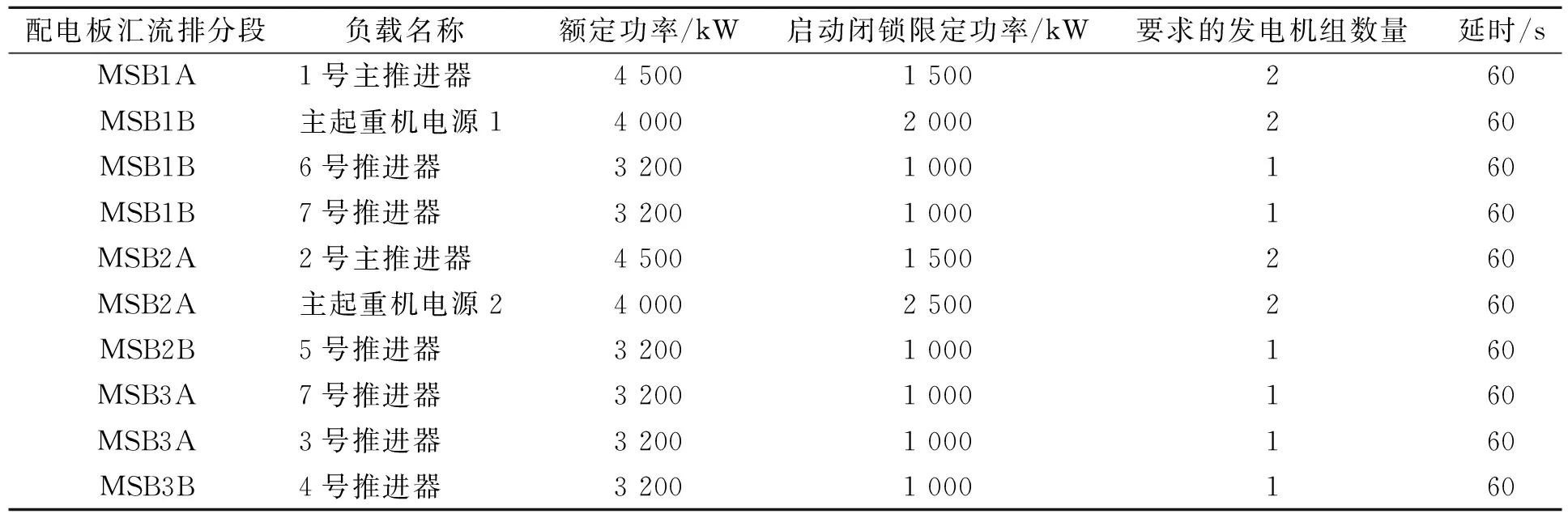
表2 PMS重载问询设定
重载问询除负载启动闭锁限定功率外,还需确定可用功率。一般船舶将电站看成一个整体,各发电机的可用功率统一考虑。对动力定位(DP2/DP3)的电力推进船舶来说,这样的处理方式就不够理想。供电主母线由多段汇流排连接组成,负载也分别接至各汇流排分段,各重要负载均是根据动力定位要求进行合理的配电。如某一汇流排分段因故跳闸,而这一分段又正好处于向其它分段大负荷供电状态,那就容易造成其它汇流排分段过载,甚至导致事故扩大化。为尽量避免这种情况发生,PMS设置了一种算法,分别计算各汇流排分段的可用功率。其作用之一就是尽量减少汇流排之间的相互供电。
2.4 自动负载脱扣
PMS在下列情况下自动卸载,自动将非重要负载卸载,以确保被连接的发电机不发生持续过载。
1台发电机突然故障导致在线的其它发电机组过载;
1个机舱发生故障导致另一机舱发电机组过载;
1台高压配电板发生故障导致其余高压配电板和与其相联的发电机组过载;
1台低压配电板发生故障导致其余低压配电板和与其相联的发电机组过载;
系统低频;
船舶管理系统所要求的操作模式需求;
DP系统所要求的操作模式需求;
起重机系统所要求的操作模式需求;
铺管系统所要求的操作模式需求。
在铺管(尖峰)或起重安全操作模式下,DP控制系统优先级高于其它系统,如:船舶辅机、起重机系统和铺管系统,其目的是需确保在这两种操作模式下能保持船位。
动力定位系统从PMS即时获取当前发电机组负荷及电网可用功率,设定一个DP系统允许负荷值;如果DP系统的负载超过了当前电网可用功率,PMS将产生一个报警;DP系统根据允许负荷值限制推进器的转速;PMS重新调整可用功率值。因变频器响应减负荷命令仅需几个周波,因此可大大降低失电的可能性。
2.5 发电机组故障停机处理
船舶管理系统监控主发电机组的状态,并与PMS实时通讯,PMS可随时了解柴油发电机组的运行状况,提高了电站的供电可靠性。
然而,主发电机组故障停机还是可能发生的。导致主发电机组故障停机的原因很多,如滑油低压、主轴承高温、发电机绕组高温等。与一般船舶不同,本船的柴油发电机组设置了故障停机延时功能。当发生故障停机工况时,柴油机就地控制箱通过硬接线直接向PMS发出故障停机信号,300 ms后停机。PMS收到此信号后,立刻减低DP系统允许负荷值,并启动备用发电机组。因PMS采样周期为100 ms,就至少有200 ms的处理时间,而变频器响应减负荷命令仅需几个周波(本船电站一个周波为20 ms),因此即使发生像发电机组故障停机那样的重大故障,仍可将失电的可能性降至最低,也即供电连续性可得到最大程度的保障。
2.6 失电之后的供电恢复
当某一主配电板(6 600 V)失电时,此主配电板上所有至推进器、铺管变压器、辅配变压器等的断路器均失压跳闸,汇流排之间的连接开关也断开。此时,PMS将立即启动备用发电机,并要求连接至汇流排,并在故障原因分析(主要指是否短路或接地故障、发生在何处)的基础上,重新按序合闸应合闸且可合闸的高压断路器。然后,PMS将按程序顺序启动各负载,从而避免各负载同时启动而导致发电机的再次过载。船舶辅机启动顺序大致如下。
1)1、2号电力变压器(分别连接至1、2号辅配电板)。1号和/或2号电力变压器高压侧合闸后,在故障原因分析(主要指是否短路故障、发生在何处)的基础上,重新按序合闸应合闸且可合闸的低压断路器。
2)3、4、5、6、7号变压器(3、4、5号变压器分别对应1、2、3号辅配电板的220 V负载;6、7号变压器对应应急配电板220 V负载。);1、2号推进器转向泵及滑油泵;1、2、3、4、5、6号主机燃油循环泵。
3)淡水系统冷却水泵。
4)海水系统冷却水泵。
5)启动空压机、机舱风机。
以上辅机的启动在20 s左右均能完成。
当主配电板(6 600 V)有电而辅配电板(400 V)失电时,PMS在故障原因分析(主要指是否短路故障、发生在何处)的基础上,重新合闸相应的高压断路器(如已跳闸,且可重新合闸),并按序合闸应合闸且可合闸的低压断路器。其余步骤与主配电板(6 600 V)失电后的处理程序相同。
主配电板和辅配电板供电和辅机工作都正常后,电力推进系统将自动按要求重新运行。
3 结束语
本船的PMS系统设计周密、功能齐全、充分考虑了动力定位电力推进船舶的特殊要求,最大程度保证了电力系统供电的连续性和可靠性,为
本船动力定位作业提供了可靠的电源。
[1] 中国船级社.钢质海船入级规范2009[S].北京:人民交通出版社,2009.
