基于5×5模板的红外小目标图像检测算法
2012-01-19周园园
周园园,杭 娟
(1.上海船舶运输科学研究所研究开发中心,上海 200135;2.西安电子科技大学电子工程学院,陕西西安 710071)
基于5×5模板的红外小目标图像检测算法
周园园1,杭 娟2
(1.上海船舶运输科学研究所研究开发中心,上海 200135;2.西安电子科技大学电子工程学院,陕西西安 710071)
针对天空背景下红外图像弱小目标的特点,提出了一种用于红外小目标检测的算法,在9个点及以上的目标中,传统图像预处理采用3×3模板达不到预期的效果,因此文中采用5×5,4×4的模板对红外图像进行中值滤波,灰度形态学等预处理,采用大规模可编程门阵列来实现,通过实测天空背景下的红外图像实验,表明了该算法能有效地检测出红外图像中的弱小目标。
红外图像识别;中值滤波;Robinson滤波
红外小目标的检测与跟踪是红外探测系统设计具有实际意义且又困难的课题,红外图像成像的特点是目标小而模糊,即目标占像素点少,信噪比低[5],目前研究的重点主要是针对红外图像的处理算法,红外热像仪等获得的小目标图像,背景中除噪声外,主要是大面积缓慢变化的低频部分,例如:飞机在云层中飞行,云层的灰度值缓慢地变化。因此,红外图像中既有噪声又有背景,而目标就是去除噪声和背景,把小目标检测出来。
一般噪声和目标的灰度值比背景的灰度值大,目标是孤立的,而噪声可能是孤立是成片的。根据这一特点,文中运用中值滤波、高通滤波、Robinson滤波对图像进行预处理,检测出目标。传统的模板是采用3×3,但对于>5个点的目标,用3×3模板则无法达到预期的效果。文中以FPGA为平台进行5×5模板的滤波预处理,将处理后的图像传输给DSP,由DSP显示处理后的图像,提高了检测的准确性。
1 滤波算法
红外图像是低对比度,低信噪比的弱目标图像,根据空中背景和弱小目标的特点,首先运用中值滤波对图像进行去噪,然后采用Robinson滤波对目标进行增强,检测出弱小目标。
1.1 中值滤波
中值滤波是一种非线性的图像平滑滤波方法[2],能够滤除脉冲噪声,同时又可保护图像目标边缘,对于小于窗长一般的窄脉冲干扰有较强的抑制作用。因此,可先通过中值滤波消除脉冲孤立点。
中值滤波可定义为

式中,g(x,y)和f(x-i,y-j)分别为输出与输入像素灰度值;W为模板窗口,窗W可选取为线状、方形、十字形、菱形等[3],为便于在FPGA上实现,文中采用5×5方形窗。
由式(1)可知,要求模板中25个数的中值,若采用传统排序法,对于文中的一副320×256的图像来说,运算量大,因此采用快速中值滤波,其算法实现与原理如下
图1(a)为原始图像5×5模板的25个数,将图1(a)中每行的数据从左向右按照降序排列,形成图1(b),再将图1(b)中每列的数据从上到下按照降序排列,形成图1(c),图中x即为25个数中的最大值。y为25个数中的最小值,将图1(c)中对角线上的数据,按照图1(d)箭头方向按照降序排列,形成图1(d),对于排列后的数据,取图1(d)中的3个数,将这3个数进行图1(e)方向的降序排列,其中这3个数的中值即为25个数的中值。

图1 25个数求中值的原理
1.2 Robinson滤波
Robinson Guard滤波器是一种非线性非参数型滤波器[1],可被认为是一种增强的边缘滤波器,利用它可有效的完成背景杂波的抑制,有效增强点源目标,其滤波模板如下。
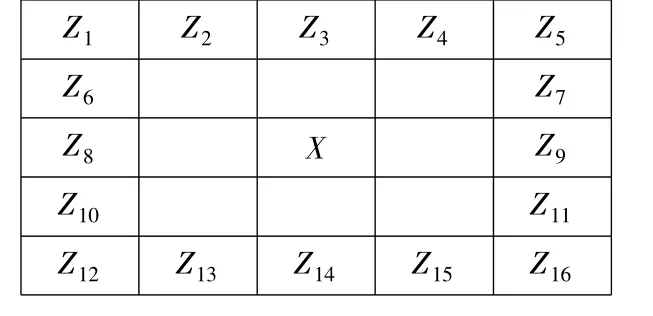
图2 Robinson滤波模板
具体计算方法为
2 硬件实现
采用Altera公司Cyclone 3 系列FPGA EP3C80F484C6[10]及Quartus II开环境[9]。首先,建立5×5模板,对此模板中的数求取中值,用此中值来代替中间一个数即D22,采用方形模板会使边缘的数据无法进行处理,因而舍去边缘数据,采样的原始LVDS图像的分辨率为320×256,其中有效数据为316×256,经过中值滤波后变为312×252,最后进行Robinson滤波,最终输出的数据只有308×248个。
2.1 5×5模板的建立
5×5模板的框图如图3所示。

图3 5×5模板框图
如上所示,D为触发器,类似于3×3模板,其基本原理为先从数据输入端读取两行数据分别缓存到FIFO1,FIFO2,FIFO3和 FIFO4中,此时 4 个 FIFO 只是写使能有效,读使能无效,然后将输入端接到D55,此时4个FIFO同时进行读写,其数据源如图连接所示,由此便形成5×5模板。
2.2 中值滤波
对5×5模板中的25个数求取中值,采用快速中值滤波,因而必须求出5个数中的中值,应用快速中值滤波算法求出中值,进行中值滤波,经过中值滤波的图像消除孤立的目标点,因而与原始图像进行差分运算将会得到目标。
2.3 Robinson滤波
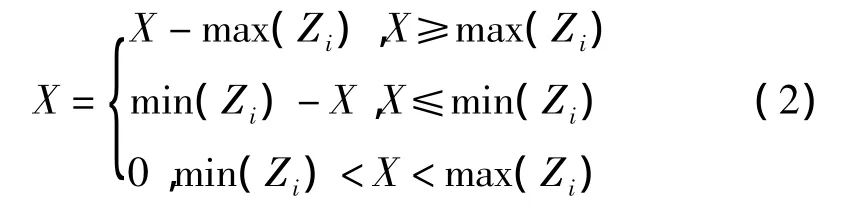
对于经过中值滤波并经过差分运算的图像再进行Robinson滤波来增强目标。使用5个数排序的方法并基于上述Robinson滤波的原理,由式(2)计算出最后的灰度值。
3 由DSP验证滤波效果
将滤波得到的308×248个数据缓存到双口RAM里面,再由DSP读取,如图4所示。

图4 DSP与FPGA传输模块
文中采用美国德州仪器公司推出的TMS320C6416[5],其是一款浮点型高性能 DSP,开发工具为CCS,与FPGA的传输主要通过中断控制引脚GP5/EXT -INT5,片选信号 TACE2,AECLKOUT 时钟引脚,64位数据线,20位地址线和GPTO口。
CCS开发环境可根据图像数据显示图像,因此把滤波后的数据进行显示来验证滤波的效果,DSP读完后显示灰度图像,如下图所示。

图5为对空拍摄的一副红外图像,其中有3个目标点,分别占3个,5个和7个像素点,由图6可知,对于5个和7个像素点的目标,经过3×3模板滤波后,其像素点降低了,而经过5×5模板滤波后,如图7所示,目标的像素点未减少,而作为背景的白云,虽然灰度值已经极小,但仍然会有一些边缘存在。因此,对于中值滤波后的图像再进行Robinson滤波,如图8所示,经过两次滤波后,不仅背景得到抑制,而且目标也得到了加强,并且目标的像素点未减少,达到了处理效果。这对于后续的图像分割和目标检测相当有利。
4 结束语
文中论述了红外图像点目标检测两种常用的算法,中值滤波和Robinson滤波,中值滤波能较好地去除噪声,而Robinson滤波对目标得到了加强,融合两种算法并扩大模板提高了检测的准确性。
基于Altera FPGA的EP3C80F484C6来进行硬件实现,并通过DSP来验证,验证的同时,实现了FPGA和DSP之间的数据传输,通过实验证明传输的正确性,从DSP显示的图像来看,文中的滤波算法能够达到设计要求,为DSP后续的设定门限检测打下良好的基础。
[1]Texas Instruments Incorporated.TMS320C6000系列 DSP的CPU与外设[M].北京:清华大学出版社,2007.
[2]林常青,李建林,孙胜利,等.含弱小目标大视场红外图像复杂背景抑制的实现[J].科学技术与工程,2007(14):3399-3403.
[3]付昱强.基于FPGA的图像处理算法的研究与硬件实现[D].南昌:南昌大学,2006.
[4]马庆军,周世椿.基于FPGA的点目标滤波检测算法[J].光学与电子技术,2008(5):52-55.
[5]Altera Conpration.Cyclone III device data sheet[M].USA:Altera Conpration,2010.
[6]王诚.Altera FPGA/CPLD设计[M].北京:人民邮电大学出版社,2010.
[4]李胜勇,姜涛,朱强华,等,红外序列图像中小目标实时检测系统设计与实现[J].红外技术,2010,32(8):471 -474.
[6]Texas Instruments Incorporated.TMS320C6000系列 DSP编程工具与指南[M].北京:清华大学出版社,2007.
[7]潘松,黄继业.EDA技术使用教程[M].北京:科学出版社,2006.
[8]姜立东.VHDL语言程序设计及应用[M].北京:北京邮电大学出版社,2004.
[11]Altera Conpration.Cyclone III device family pin connecting guidelines[M].USA:Altera Conpration,2009.
Small Target Detection Algorithm for Infrared Images Based on the 5×5 Template
ZHOU Yuanyuan1,HANG Juan2
(1.Research and Development Center,Shanghai Ship and Shipping Research Institute,Shanghai 200135,China;2.School of Electronic Engineering,Xidian University,Xi'an 710071,China)
In view of the characteristic of small targets in the sky background,an algorithm used for detection of small targets in the infrared image is presented.In the target of more than 9 points,the traditional image processing based on the 3 ×3 template does not reach the expected effect.Therefore,this paper uses the middle and top-hat filter to process the infrared image based on the 5×5 and 4×4 template.The design adopts the FPGA.Experiments on real infrared images in the sky background show that the algorithms can detect the small target in the infrared image effectively.
infrared image recognition;top-hat filter;Robinson filter
TP391.41
A
1007-7820(2012)06-014-03
2011-12-13
周园园(1987—),女,硕士研究生。研究方向:自动化,轮机自动化。