基于模糊比例积分微分自整定技术的地铁车辆温控仿真研究*
2012-01-17罗永建柴晓冬郑树彬朱文发
罗永建 柴晓冬 郑树彬 朱文发
(1.上海大众汽车有限公司,201805,上海;2.上海工程技术大学城市轨道交通学院,201620,上海∥第一作者,工程师)
上海轨道交通9号线车厢内温度环境恶劣,运营部门经常接到乘客投诉。造成这种现象的原因主要是车厢内温度波动性太大,致使其空调不停工作,整个系统的输出误差较大。这不仅降低了乘客的舒适性,同时造成了地铁空调器件的损坏。在列车内外温度波动时如何使其保持在稳定的温度变化范围内,是地铁空调控制的一个重要问题。
1 变论域模糊比例积分微分自整定控制
上海轨道交通空调温控装置通过对通风机、压缩机、冷凝器的控制来达到设定的温度目标,因此,目前车辆空调温度控制方式仍采用多个复合的PID(比例积分微分)控制。地铁空调具有延时性较大,非线性、干扰频率非常多,受外界因素影响大等特点,这使得常规PID参数整定的困难性非常大,在外界干扰较大的情况下,系统输出的误差将变大,即地铁空调的温度波动性加大。常规PID控制存在参数自适应性欠佳,以及PID参数无法自整定的问题,难以达到地铁温控装置要求的指标。模糊控制理论正好弥补了这方面的不足,其对系统模型不敏感,鲁棒性强,适应动态过程。本文设计了一种变论域模糊PID自整定控制器,针对地铁空调系统进行了仿真。仿真结果表明,该控制技术易于实现参数的自整定,使地铁空调系统的自适应性得到了改善。模糊自整定PID控制器流程如图1所示。图中,α、β、γ分别为系统误差、误差变化率和输出量kp、ki、kd的变论域调整因子。

图1 变论域模糊PID自整定在地铁温控中的应用流程
2 地铁温控装置模糊PID自整定模型的建立
2.1 控制量的模糊化
本文采用两个模糊控制器。模糊控制器1采用2输入3输出的形式,以一定时间内车厢内外温差e和温差变化率ec为输入语言变量,论域伸缩因子α、β、γ为输出语言变量。模糊控制器2采用2输入3输出的形式,以e和ec为输入语言变量,PID参数kp、ki和kd为输出语言变量。输入语言变量e、ec的语言值均取为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)等7种。输入输出变量论域伸缩因子α、β、γ的语言值取为{B,VB,M,S,VS}。B、VB、M、S、VS分别为负大、负小、零、正小、正大。输出语言变量kp、ki和kd的语言值均取为 NB、NM、NS、ZO、PS、PM、PB等7种。将e和ec量化到(-3,3)的区域内;α、β、γ量化到(0,1)区域内;kp量化到(-3,3)的区域内,ki量化到(-0.6,0.6)区域内,kd量化到(-30,30)区域内。量化因子分别为 Ke、Kec、KΔkp、KΔki、KΔkd、Kα、Kβ和Kγ。Ke=3/3=1,Kec=3/3=1,KΔkp=3/3=1,KΔki=0.6/3=0.2,KΔkd=30/3=10,Kα=Kβ=Kγ=1/5=0.2。隶属函数均为高斯型,隶属函数曲线见图2。

图2 温差隶属函数曲线
2.2 变论域思想及其规则
变论域模糊PID自整定控制器是在模糊PID自整定控制器的基础上加入变论域思想形成的。变论域环节就是在原来模糊PID控制器的基础上加入了一个对输入输出论域进行模糊控制的环节。即按照控制系统工作过程中e和ec的变化轨迹来调整所设定好的输入输出变量的论域。从操作上来讲,就是通过e和ec的变化轨迹来修正量化因子,实现论域随系统实时变化进行伸缩。这大大改善了常规PID控制器和模糊PID控制器的控制精度,提高了系统的自适应能力。
2.3 模糊规则的确定
首先确定α、β、γ的模糊规则。根据变论域模糊控制器的原理,设e的变量伸缩因子为α,ec的变量伸缩因子为β,输出论域伸缩因子为γ。其基本思想如下:当输入变量e和ec较大时,其论域保持不变;当输入变量较小时,将其论域缩小,定义在论域上的模糊划分也随之压缩,使输入变量可用规则增多。这就消除了模糊规则数量与控制精度的矛盾,增加了控制灵敏度[7]。因此e与ec对于α和β的模糊规则如表1所示。

表1 输入变量伸缩因子α/β模糊规则
输出论域伸缩因子γ的取值由e和ec共同决定。即根据e和ec当前取值所反映的系统响应状态,来确定输出论域进行多大程度的扩大或者缩小。当e和ec很大且两者符号相同时,表明系统与设定值之间的差距很大,且系统正以很快的速度偏离设定值,这将使误差进一步扩大,此时应有较大的控制量将系统调节回来,使系统尽快跟踪设定值,因此,γ应取大些以使输出论域扩大。当e和ec很大但两者符号相反时,表明系统与设定值之间的差距很大,但系统正以很快的速度靠近设定值,此时的控制量可以保持适当值,使系统既快速跟踪设定值又不产生较大的振荡 ,因此,γ应取小些以使输出论域有较小幅度的压缩。当e接近零而ec很大时,表明系统与设定值之间的差距非常小,但系统正以很快的速度偏离设定值,此时控制量应较大以抑制系统偏离设定值的趋向,因此,γ应取较大的值以使输出论域有所扩大[7]。
在PID控制中,比例系数kp的作用在于加快系统的响应速度,提高系统调节精度;积分作用系数ki的作用在于消除系统的稳态误差;微分作用系数kd的作用在于改善系统的动态特性[6]。当车厢内外温差较大时,为防止车厢内外温差的瞬间变大微分对其的放大作用,使系统尽快达到平稳状态,应取较大的kp和较小的kd,同时,积分作用太强会使系统震荡性加强,应对积分作用加以限制,通常取较小的ki值。当车厢内外温差中等大小时,为使系统的震荡性减小,同时保证系统响应速度,kp应适当减小,ki和kd的取值大小也要适中。当车厢内外温差较小时,为使系统稳态误差减小,kp和ki应取较大值,同时,为避免系统输出在设定值附近震荡,减小干扰因素对系统的影响,kd的取值要适当。综上所述,制定模糊规则如表2所示。

表2 kp/ki/kd 模糊规则表
2.4 模糊量的清晰化
由于输出量kp、ki和kd均为变化域内的量,因此需乘以量化因子得到 Δkp,Δki,Δkd。修正值kp、ki和kd的计算公式为:

模糊模型建立后需将其导入工作空间,然后嵌入simulink中的fuzzy模型当中。
3 地铁空调系统模糊PID仿真模型
3.1 数学模型的建立

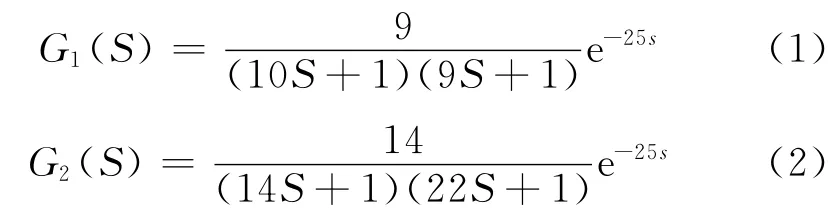
3.2 仿真结果分析
在simulink中建立温控模型,在零时刻输入一个数值为3的阶跃响应,仿真结果如图3、图4所示。

图3 G1(S)与G2(S)在常规PID控制下的阶跃响应
从仿真结果中可以看出,建立的数学模型在变论域模糊PID控制下相对于常规PID控制具有超调更小、响应速度更快、控制精度更高等优点。
4 结语
对比图3(a)和图4(a)、图3(b)和图4(b)可知:

图4 G1(S)与G2(S)在变论域模糊PID控制下的阶跃响应
(1)从系统的响应时间、超调上看,变论域的模糊PID自整定技术对系统的控制明显优于常规PID控制。
(2)当外界干扰因素发生变化时,被控系统的参数结构会发生变化。造成地铁温控系统不稳定的外界因素主要有车厢内人员的增减、车辆进站开关门过程与外界产生的热交换、车辆高低频率错综复杂对温控系统的干扰等,变论域的模糊PID自整定控制能够在地铁温控装置运行过程中进行快速灵活有效的在线调整,既增强了该系统对外界干扰的适应性,也减小了系统的输出误差。这就是变论域模糊PID控制技术对干扰的自平衡能力。
(3)从现实来考虑,系统在变论域的模糊PID自整定控制下震荡性明显减小,机器磨损程度明显减小。地铁空调属于“耗能大户”,震荡性减小也提高了该系统的节能效果,具有一定的经济效益。
[1] 齐学义,蔡艾江,吴 疆,等.变风量空调系统模糊PID控制的仿真[J].江苏大学学报,2005,26(4):364.
[2] 黄松林.PID参数模糊自整定非线性系统仿真研究[J].机械工程与自动化,2007(2):93.
[3] 陈曦,张金红,付少波.变风量系统中央空调房间的建模及控制系统仿真[J].微计算机信息,2005,21(7-1):68.
[4] Wang Hui,Yang Yongbo,Liu Meiyu.Fuzzy-PID control in the application of multi-purpose vehicles of the road snow plowing[C]∥2009International Conference on Web Information Systems and Mining,2009:246-250.
[5] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,1995.
[6] 胡寿松.自动控制原理[M].北京:科学出版社,2007.
[7] 马祥兴.可变论域自适应Fuzzy-PID控制器的设计与研究[J].微计算机信息,2010,26(9-1):69.
