一种基于阈值的图像分割算法研究
2012-01-14王旭晨孙爱程
王旭晨,孙爱程
(武汉理工大学信息工程学院,湖北武汉430070)
0 引言
图像分割是图像处理与计算机视觉领域低层次视觉中最为基础和重要的领域之一,是对图像进行视觉分析和模式识别的基本前提。同时也是一个经典难题,到目前为止既不存在一种通用的图像分割方法,也不存在一种判断是否分割成功的客观标准。下面将针对此问题进行研究。
1 相关工作
图像分割一直是图像工程中的关键技术。目前,众多的研究者正在对此进行研究,相继提出了一系列图像分割方法[2-5]。如文献[2]根据人脑MR图像的特征,提出一种快速CV双水平集算法。对MR图像进行的分割实验表明,其分割效果更好,速度有大幅度的提高。文献[3]针对心脏CT图像的具体特征提出一种分割技术,将基于像素的传统方法和基于水平集的活动轮廓模型相结合,完成图像预分割。然而,以上的方法都要求满足背景灰度均低(或高)于目标,不适合背景区域与目标区域存在灰度范围有交叠的非均匀照度场合,另外实验中采用的是全局阈值,对噪声很敏感。阈值求取计算量较大,而且不能很好地处理灰度比较均匀的单纯区域、区域划分大小难以确定等问题。鉴于此,提出了一种基于阈值的图像分割算法,并通过实验验证了所提出方法的有效性。
2 阈值计算
2.1 边缘阈值的计算
定义1:对一幅图像A的所有像素点a( i,j)都利用单独的分割阈值b( i,j),由b( i,j)组成的图像B被称为图像A的阈值图像。
以下是边缘阈值的计算过程。由于图像的边缘处邻域内的灰度变化较大,选择具有较好抗干扰能力的8方向最佳边缘检测法[5],即可得到边缘增强图像G。

式中,dk> ε,di为原图像 F在 ( x ,y)关于方向 i的3×3差分值。对边缘增强图像G提取关于方向k极大值构成细化的边缘图像G'。其边缘点(i,j)处对应的阈值(简称边缘阈值)T(i,j)为:

式中,S为边缘点(i,j)的邻域。
2.2 非边缘阈值的计算
由式(2)能够获得全部强边缘处的阈值,从而得到边缘阈值图像T,但非边缘处的阈值暂无法确定,要通过已知边缘阈值来插值估计,最终得到完整的阈值图像。对于一维阈值曲线能使用线性插值方法,如式(3),其中非边缘处的阈值t(x)和t(x2)为已知边缘阈值。

针对二维图像,要通过利用多个已知边缘阈值,再采用线性插值方法估计非边缘处的阈值。由曲面拟合的基本原理可知,当曲面次数为n时,需要控制点的个数为N=(n+1)(n+2)/2,线性插值时取n=1,需要控制点的个数为3,且位置不共线。设曲面拟合方程为:

式中,系数a,b,c由求解方程式(5)得到。
3 阈值图像拟合
3.1 拟合区域划分
用得到的n个边缘阈值点作为特征点构成众多的三角形区域,用以覆盖整个图像区域,三角形个数为n-2。因为需要求解线性方程组(5)获得式(4)中的系数,除3个特征点不能共线以保证逆矩阵存在之外,还须防止出现狭长三角形以免病态方程组求解造成太大的计算误差,在进行三角区域划分时尽量构成锐角三角形,本文采用优化的Delaunay三角剖分方法[6]进行区域划分。
3.2 控制点的简约
如果将所有边缘都作为控制点,则划分出的区域太多,不但造成区域划分耗时多,而且插值计算的代价非常大。为提高拟合计算速度,这里对边缘点进行合理的简约,即对每一个小的区域内选取具有代表性的边缘点作控制点。
鉴于照度具有渐变性,阈值图像灰度变化平缓的特点,可以通过聚类减少边缘阈值点数,故采用经典桶聚类方法,将一定范围内的控制点合并,以加权平均阈值作为简约后控制点的阈值。同时保留聚类后位置结果仍在强边缘上的点。
若(i,j)能够与第k个已有桶进行合并,聚类合并方法为:

式中,(xk,yk)为第k个桶的坐标点;vk为此桶的阈值;t'(i,j)为待聚类点(i,j)处的边缘阈值。聚类结束后判断(xk,yk)为边缘上的点,则为有效控制点。
3.3 阈值的外插
通过已知边缘阈值进行三角剖分得到的区间无法覆盖图像的四边,这就使图像的四周区域不能估计阈值。若在图像4个角上外插补充控制点,那么就能确保覆盖全部图像区域。由于4角上控制点的阈值一般不能直接利用边缘信息获取,这里利用邻近点来估计。针对图像4角,分别利用与它的最近的2个已知控制点a和b的距离加权平均值计算其阈值,如式(7)。设估计点p到点a和b的距离分别为la和lb,a和b点的阈值分别为ta和tb,则

4 图像分割算法
通过以上分析,这里研究并提出了图像分割算法,主要步骤如下:
①根据式(2)和式(3)分别计算出边缘阈值T(i,j)和非边缘阈值t(x),然后将图像像素点划分为 K 个类别 K:{c1,c2,…ck};
②基于优化的Delaunay三角剖分方法进行区域划分,形成聚类,并获取聚类类别数目和聚类中心;
③将图像中的像素点按照K-means规则分配到离其各个类别最近的聚类中心类别中;
④根据式(6)的聚类合并方法进行控制点的简约和阈值外插技术来更新各个类别的聚类中心值;
⑤迭代执行,直到算法收敛或达到停止条件,否则转③;
⑥利用基于局部同态的种子区域生长算法对聚类结果进行区域划分。
5 实验结果及分析
为了全面测试算法分割效果,这里实验的数据集合为自然场景图像。自然场景图像集合由Benchmark平台自带自然场景图像组成。算法对图像的分割效果采用Benchmark平台来评估。下面给出了2种图像的分割结果比较,如图1和图2所示。从图1可以看出,此算法可以有效采用图像边缘信息实现三角剖分,且可以延展得到阈值图像,从而较好地实现对原图像的分布式阈值分割。图2所示实验证明了平滑滤波策略的鲁棒性。图2(c)是在原图上加了噪声的图像,对它进行模糊去噪后得到图2(d),然后采用本算法进行分割,得到图2(e),与图2(b)相比,图2(d)虽然有些边缘比原图模糊,但是对最后的分割结果影响很小。

图1 照度不均匀的海底图像分割(实验1)

图2 米粒原图和噪声图像分割比较(实验2)
采用不同方法对2种图像的分割结果比较如图3和图4所示。其中,图3的原图是照度不均匀的且具有复杂背景,图4的原图中存在噪声,且背景区域和目标区域的灰度有交叠。分块Otsu有较多的误分割和漏分割问题,这是由于分块选阈值过程中依据块中的目标与背景的灰度变化确定了局部阈值。因为多阈值融合算法是以背景灰度渐变为基础的,图3中进行了分割,而在图4中却欠分割。这里提出的算法可以避免噪声与光照不均带来的问题,从而实现整体目标的有效提取。

图3 照度不均匀图像的分割结果比较
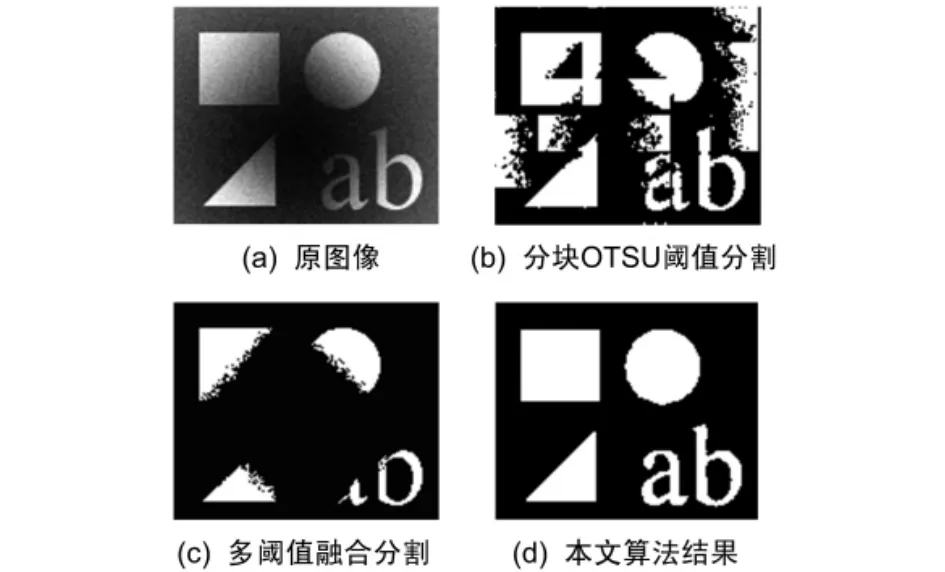
图4 噪声图片分割结果比较
最后,为了综合比较本文算法的性能,在表1中统计了实验1和实验2中得出的查准率和F值。从中可以看出,这里提出的图像分割算法对于不同类型的图像都具有较好的分割效果。主要因为本文算法在分割过程中考虑了非边缘阈值的提取,并进行了曲线拟合,从而较好地解决了多目标分割,提高了算法的自适应性。

表1 Benchmark评估值
6 结束语
上述提出了一种改进的阈值图像分割方法。通过实验表明了此方法通过采用目标的轮廓边缘灰度变化,可以较好地将目标实行分割,且边缘吻合度与现有典型算法相比,具有较好的优越性;利用边缘阈值的空间分布得到分布阈值,避免了照度不均匀的情况对多目标分割时的影响;利用灰度聚类来确定目标轮廓边缘的代表点可以快速实现阈值曲面的插值操作;同时,该算法抗模糊能力强,便于平滑去噪,解决了基于边缘方法容易被噪声干扰的问题,具有较好的鲁棒性。
[1] FU K S,MUI J K.A Survey of Image Segmentation[J].Pattern Recognition,1981,13(1):3-16.
[2]詹天明,张建伟,陈允杰,等.快速CV双水平集算法的人脑MR 图像分割[J].计算机工程,2009,35(14):181-183.
[3]付增良,陈晓军,叶 铭,等.心脏 CT图像分割方法[J].计算机工程,2009,35(12):189-191.
[4]陆 爽,彭 力.基于FCM改进算法的手背静脉识别[J].计算机工程,2010,36(16):154-156.
[5]税午阳,周明全,耿国华.基于医学体数据场的大脑皮层重构[J].计算机工程,2010,35(7):247-249.
[6]罗三定,沙 莎,沈德耀,等.棒材生产在线视觉计数系统研究[J].小型微型计算机系统,2004,25(4):671-675.
