多无人机联合自动围捕策略研究
2012-01-11路月潭
路月潭
(安徽电子信息职业技术学院 机电工程系, 安徽 蚌埠233000)
追捕-逃避问题(Pursuit-Evasion Games)是研究如何指导一群追捕者相互合作去捕捉另一群运动的猎物.由于这类问题有着广泛的应用前景,因此受到很多学者的关注.追捕-逃避问题的关键技术在军事、工业等方面有着广泛的应用,如机器人部队合作包围/捕获入侵者[1]以及无人机和地面无人车辆协同作战[2]等对抗领域都已经采用追捕-逃避问题来研究.
目前,大多数追捕-逃避问题讨论的是追捕单目标问题[3]或是仅给出了移动目标采用随机逃跑策略而追捕者采用随机独立的搜索策略[4],这一方面降低了追捕的难度,另一方面并没有发挥多个追捕者协作式搜索的优势.
由于无人机拥有众多有人驾驶飞机所不具有的优点,使得其在军事和民用等诸多领域中有着广泛的用途和广阔的应用前景.本文考虑多架无人机在二维固定区域内协同搜索多个目标,发现目标后,合作追捕的目标,目标采用相对于无人机相反方向逃逸的策略,最后通过仿真验证本文协同追捕策略的正确性.
1 任务描述
系统中的每个无人机和移动目标都是有智能的,我们统称为智能体,它们具有感知、规划、移动能力以及与其它智能体通信协商的能力(移动目标暂时不考虑通信能力).每个智能体都具有三种不同的感知区域[5].如图1所示.最里面的设置为移动智能体之间避碰的区域;中间为视觉感知范围;最外侧为无人机对外的通信范围.每个无人机能够通过观察和与其它无人机的协商,规划自己的移动方向.系统中假设:①移动目标也能根据感知得到的信息规划自己的行为,当无人机发现移动目标后,由于感知的同步性移动目标采取与无人机之间排斥力的策略,以及移动目标之间的避碰,也采取排斥力策略,则逃跑的方向即为这些斥力的合力方向,如图2所示.图中圆点为目标,实线表示斥力,虚线为合力,即目标逃跑的方向.②每个智能体知道自己的位置.③无人机可以在其通信范围内互相通信,信息共享,即通信范围中的无人机彼此知道其位置信息以及目标的位置和运动方向等,本文的通信范围是整个二维固定区域.④追捕成功条件:移动目标被4架无人机从不同的方向合围,直到所有的无人机与移动目标的距离小于围捕半径,则移动目标被成功追捕.
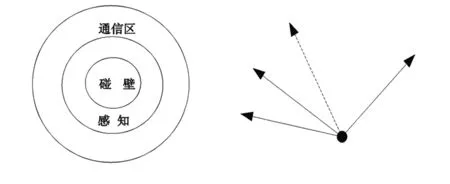
图1 无人机的三个感知范围 图2 目标逃逸的合力方向
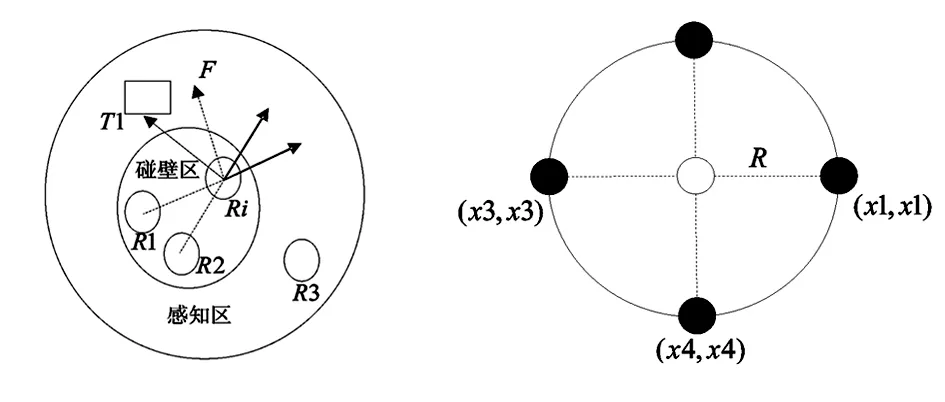
图3 无人机移动控制规则 图4 势点决策围捕图
2 无人机行为控制
如图3所示,为无人机跟踪目标的基本控制规则[6].无人机Ri受到避碰区内无人机R1和R2的排斥力作用,同时受到感知区内目标T1的吸引力的作用,它们的合力F表示机器人R1的移动方向和大小,无人机R3对Ri无作用力影响,因为R3在Ri的避碰区外,所以无人机的移动总是远离其它无人机并指向目标的移动.
在多目标追捕任务中,每个无人机都执行相同的算法,并且无人机的移动是同步并行进行的.FRi表示无人机Ri所受到的感知范围内目标的引力和避碰范围内无人机斥力的合力.
(1)
FRi,T1=∂(sj-qi)
(2)
(3)
其中,FRi,T1表示Ri的感知范围内目标对其引力.FRi,Rl表示Ri的避碰范围内第l个无人机对其斥力,∂、β分别是一个正的增益系数,sj、qi分别是目标和无人机的位置,rRi表示无人机的个数.
FRi=ma
(4)
其中,m=1是无人机的质量,a是无人机的加速度,amax是无人机的最大加速度,无人机每隔Δt的时间重新计算所受到的作用力,如果Δt比较小,可以认为下式成立:
(5)
即无人机所受作用力如果超过最大驱动力,也只能按最大驱动力计算速度.
无人机的运动模型:
(6)
(7)
θi(k+1)=θi(k)+ui(k){i=1,2,…,m}
(8)

3 目标搜索
目标搜索[7]是在被称之为“伸缩式”搜索方法上改进的.由于“伸缩式”搜索方法在扩散搜索目标时,收敛速度较慢.本文采用在扩散搜索时将圆形边界被M架无人机等分,当无人机在收缩搜索之后,确定各无人机对应的等分点为其子目标并进行路径规划,执行扩张搜索.
其收缩搜索路径的确定方法如下:
Fx,i(m)=k×((xi-1(m)-xi(m))+
(xi+1(m)-xi(m)))
(9)
Fy,i(m)=k×((yi-1(m)-yi(m))+
(yi+1(m)-yi(m)))
(10)
Fx,i(m),Fy,i(m)为各无人机间的位置差异对无人机x,y方向上的影响.k是收缩系数,它的取值大小控制着收缩过程的快慢.m为收缩运算的次数,i=1,2,…,n(n为围捕无人机个数)为无人机标号.
xi(m+1)=xi(m)+Fx,j(m)
(11)
yi(m+1)=yi(m)+Fy,j(m)
(12)
由于采用这种方法进行搜索时,无人机总是趋于均匀分布,减小了路径冲突的可能,从而提高了搜索的效率.每个无人机规划自己的搜索子目标信息(xi(m+1),yi(m+1))做出相应的动作控制.
其扩张搜索路径的确定方法如下:
若有M架无人机,可以将边界圆等分成M份,则有M个坐标为(x(k),y(k)){k=1,2,…,M},这M个坐标位置每隔一段时间变化一次,循环变化,无人机可以将这M个坐标作为搜索子目标规划自己的路径.
4 追捕决策
设获取到的被追捕目标的当前坐标为(x,y) ,运动方向为θ,构造基于“势点”的追捕任务决策算法[8],其原理如图4所示.在图4中,被追捕目标的“势点”集合为(xi,yi),{i=1,2,3,4} ,“势场”半径为R,(x1,y1)为序列{(xi,yi)}中的基准“势点”,其航向与被追捕目标的运动方向θ保持一致,有:
(13)
(14)
为保证追捕有效,需要确保一定的队形紧密度,“势场”半径R需设置比围捕半径略小,这四个“势点”将作为四架无人机的搜索子目标.
a初始状态 b收缩搜索状态
c扩张搜索状态 d所有目标均被捕获
5 仿真
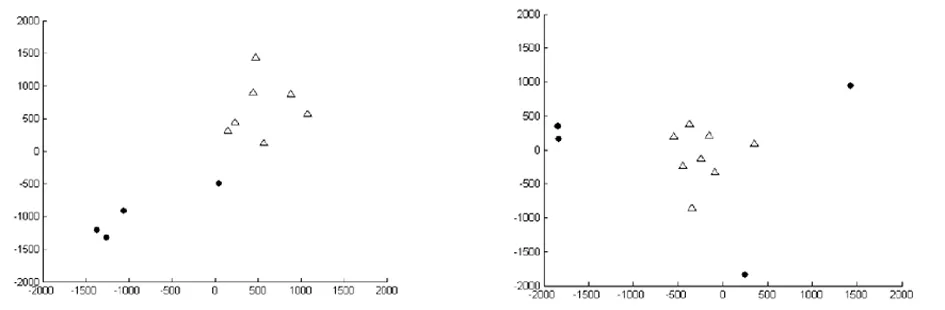
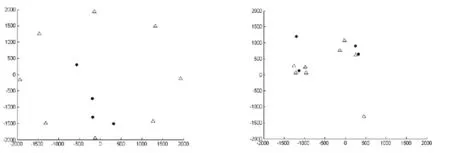
仿真中有8架无人机和4个目标,随机产生无人机和目标的位置坐标、初始航向以及速度,无人机的速度比目标的速度略大.某无人机发现目标时,将组成有四个成员的团队,从不同方向追捕目标,当所有无人机均在追捕半径内,目标即被捕捉.图5为仿真试验中得到的图像,三角形代表无人机,圆形代表移动目标,当目标被捕捉后,将变成五角星固定在被捕捉时的位置.图a表示随机产生的无人机和目标的初始位置;图b表示无人机正在收缩搜索目标;图c表示无人机正在扩张搜索目标;图d表示所有目标都被捕获.
6 结论
本文介绍了无人机运动的控制方法、协同搜索方法以及追捕目标模型,在简单环境中仿真验证了无人机追捕目标问题,仿真中无人机可以动态避免相互之间碰撞,成功发现目标,追捕目标,直到所有目标被捕捉完毕,体现了很好的整体智能性.
参考文献:
[1]Yamaguchi H.A cooperative hunting behavior by mobile-robot troops [J].The International Journal of Robotics and Research (S0278-3649),1999,20(9):93l-940.
[2]Vidal,R.,Rashid,S.,Sharp,C.etc.Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles[C]//Proceedings of the 2001 IEEIE International Conference on Robotics 8 Automation Seoul,Korea(S1050-4729),2001,3:2948-2955.
[3]Yamaguchi H.A distributed motion coordination strategy for multiple nonholonomic mobile robots in cooperative hunting operations [J].Robotics and Autonomous Systems(S0921-8890),2003,43(4):257-282.
[4]HesPanha J,Prandini M,Sastry S.Probabilistic pursuit-evasion games:a one-step Nash approach[C]//The 39th IEEE Conf on Decision and Control,Sydney,Australia,2002.4:56-70.
[5]李淑琴,王欢,李伟,杨静宇.基于动态角色的多移动目标围捕问题算法研究[J].系统仿真学报,2006,18(2):362-365,390.
[6]周彤,洪炳镕,朴松昊,等.基于多机器人自组织协作的多目标跟踪[J].高技术通讯,2007,17(12):1250-1255.
[7]宋梅萍,顾国昌,张汝波.多移动机器人协作任务的分布式控制系统[J].机器人,2003,25(5):456-460.
[8]李焕全.基于“势点”的多移动机器人协调围捕/拦截策略[J].自动化与仪表,2007,5(1):1-4.
